基于数字式红外传感器的姿态测量盲区补偿法
2014-09-20王佳,李健
王 佳, 李 健
(内蒙古工业大学 机电控制重点实验室,内蒙古 呼和浩特 010051)
0 引 言
姿态测量系统是小型无人机飞控系统的重要组成部分,它为小型无人机实现自主导航提供了可能。传统飞行器通常使用MEMS惯性器件实现姿态测量,但MEMS器件自身结构存在精度较低、漂移严重的缺点,特别是当小型无人机在飞行过程中出现附加加速度时,姿态解算变得相当复杂。
根据天空与大地热容量的差异,采用一对红外传感器通过感知这种热容量差异获取载体倾角是一种绝对姿态测量方法[1,2],该方法不存在累计误差,电路设计简单,且体积小,质量轻,适用于小型飞行器[3]。但由于红外温度传感器自身结构限制,采用单轴红外传感器测量姿态角时存在测量盲区,针对这一问题,本文设计实现了两轴红外姿态测量系统,补偿单轴系统存在的盲区。
1 基于红外辐射的姿态测量原理
天空与大地热容量存在差异,天空温度远低于大地的温度,红外传感器能够探测天空与大地的红外辐射量,并感知这一差异[4,5]。本文设计采用基于“塞贝克效应”的数字式热电堆红外传感器,该传感器通过其圆锥形视窗探测天空和地面等环境辐射为5.5~14μm波长的红外线能量,输出一个相应的温度值。
在同轴的相反方向安装2只完全相同的红外传感器,飞行器处于水平状态时,2只红外传感器的圆锥形视场内朝向天空和朝向大地的区域相等,此时两传感器输出温度差为0;而当飞行器发生倾斜时,偏向大地的红外传感器输出温度大于偏向天空的传感器输出温度,二者产生一个不为0的温差,温差随着倾斜角的变化而变化,它反映了载体的倾斜程度,则可根据2只传感器输出温差的大小来获得此时载体的姿态角[6,7],原理如图1所示。
2 单轴红外姿态测量盲区
根据上述原理,采用MLX90615数字式输出红外传感器设计实现单轴红外姿态测量模块,如图2所示。该传感器视场角为100°,内部集成DSP,可通过SMBus方式输出温度值。

图1 单轴红外测姿系统基本工作原理

图2 单轴姿态测量模块
在开阔高地对单轴红外姿态测量模块进行测试,采用标准角度规设定角度,试验在-90°~90°之间进行,每隔5°采集600组数据,取平均值,得到输出温差与设定角度之间的关系,如图3。根据图3得到拟合曲线,可推导出单轴倾角测量公式
θ=1/K·(arcsin(To/Tmax)).
(1)
其中,θ为单轴轴线对地倾角,To为单轴输出温差,Tmax为单轴输出最大温差,K为不同环境下的校准系数。

图3 输出温差与倾角关系
根据式(1)可得到单轴实测倾角与设定角度之间的误差对比,如图4所示。
图4 单轴姿态测量系统误差
由图4知,误差较大的区域主要集中在±55°~±90°之间。原因是红外传感器自身结构存在限制,导致其视场角有限,所选红外传感器视场角为100°,在单轴旋转角度达到50°后,2只传感器一只完全朝向天空,一只完全朝向大地,如图5所示。在50°~90°范围内,输出温度差值变化十分微小,导致该区域倾角测量误差变大,同样的盲区还存在于-50°~-90°区域。测量盲区导致小型无人机自主飞行在该区域处于失控状态,为解决这一问题,采取增加一组传感器的方法来实现盲区补偿。
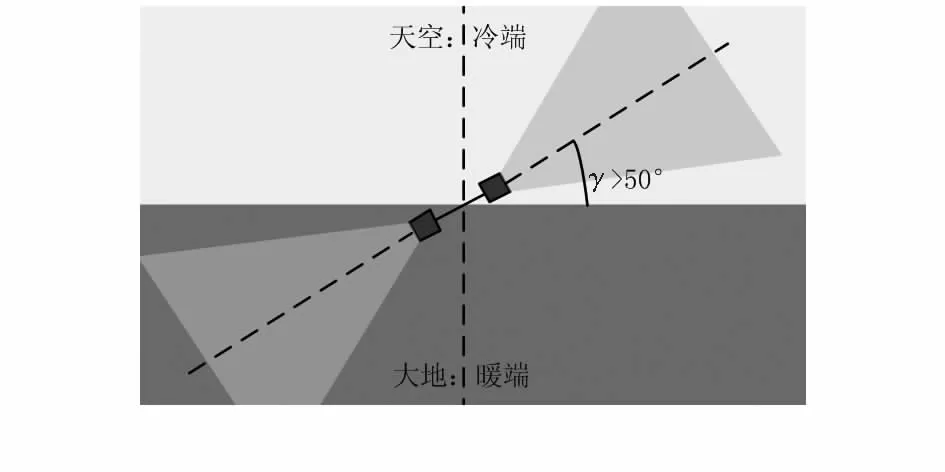
图5 盲区产生原理
3 双轴姿态测量与算法设计
单轴姿态测量模块的盲区存在于靠近单轴垂线的2个80°范围内,那么,新增红外传感器轴线与原传感器轴线夹角必须在80°~100°之间才可消除盲区。选择在与单轴轴线垂直的方向加装1对红外传感器,如图6所示。

图6 双轴传感器模块
加装一组红外传感器后,原X轴测量盲区的倾角测量由新增的Y轴完成。如图7,即X轴测量区域为[-50°,50°],Y轴测量区域为[40°,90°]∪[-40°,-90°]。两轴在[±40°,±50°]区域发生重叠,取其中间值45°作为两轴转换倾角,即X轴可测区域[-45°,45°],Y轴可测区域(45°,90°]∪(-45°,-90°]。

图7 双轴模块视场示意图
由于X轴与Y轴相互垂直,则在Y轴的可测区域通过式(1)算法测量得到的对地倾角与X轴此时的实际倾角互补,即θ=90°-θY。联系式(1),可得到Y轴对地倾角的计算公式
θ=1/K·(arcos(To/Tmax)),
(2)
则双轴红外姿态测量模块算法可表示如图8所示,其中,T45为倾角45°时的输出温差。
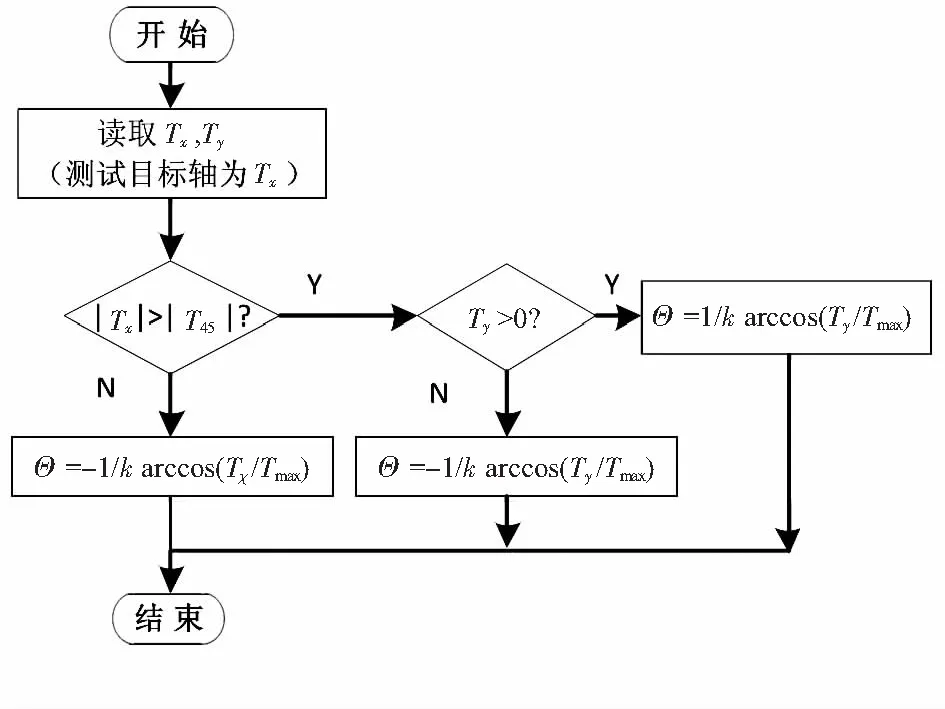
图8 双轴测姿系统算法流程
4 实验与结果分析
分别在晴天、夜晚、阴天、多云天气对双轴红外姿态测量模块进行倾角测量实验。实验采用标准角度规设定角度,测试范围为-90°~90°,每5°采集600组数据,取平均值,得到倾斜角度与两轴输出温差之间的关系,如图9所示。
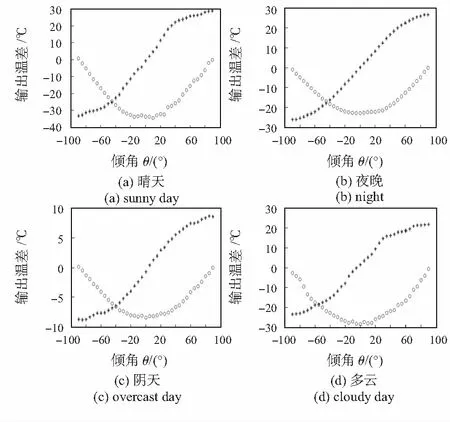
图9 双轴测姿系统输出与倾角关系
对比4种条件下的设定角度值与双轴姿态测量模块根据双轴算法解得的倾斜角,得到两者误差,取误差平均值,如图10所示。由图10可知,双轴红外测姿模块在-90°~90°范围内测量得到的倾角误差小于2°,与图4中±50°~±90°的误差相比有明显减小,实现了-90°~90°的姿态角测量,消除了盲区产生的影响。
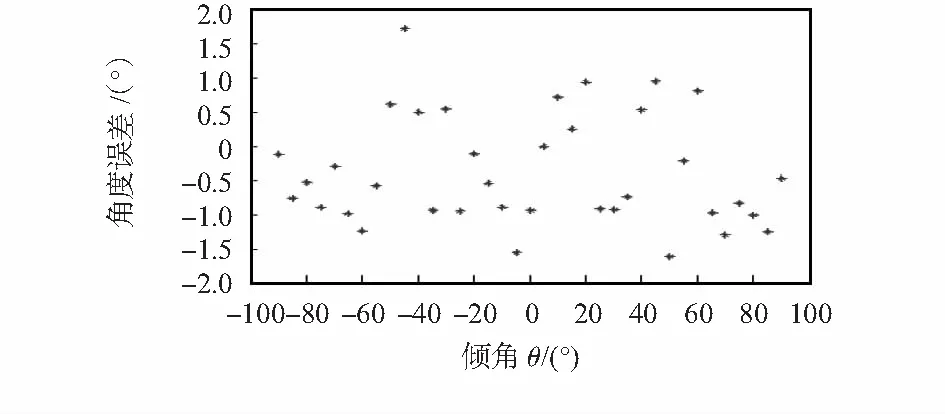
图10 双轴测姿系统测量误差
5 结 论
首次采用数字式输出红外热电堆传感器设计实现了双轴红外姿态测量模块,有效消除了单轴红外姿态测量模块的测量盲区,实现了姿态角-90°~90°的测量,经过静态测试得到角度偏差小于2°的测量结果。
参考文献:
[1]蔡 瑜,叶雄英,朱 荣,等.用于微小飞行器姿态测量的红外地平仪研制[J].仪表技术与传感器,2009(7):33-35.
[2]Taylor B,Bil C,Watkins S,et al.Horizon sensing attitude stabilization:A VMC autopilot[C]∥18th International Unmanned Air Vehicle Systems Conference,Bristol,UK,2003.
[3]FMA Inc.Co-pilot infrared flight stabilization system user gui-de[EB/OL].[2002—10—11].http:∥www.fmadirect.com.
[4]Chao Hayang,Cao Yongcan,Chen Yangquan.Autopilots for small unmanned aerial vehicles:A survey[J].International Journal of Control,Automation and Systems,2010,8(1):36-44.
[5]Di Long,Chao Haiyang,Chen Yangquan.A two-stage calibration method for low-cost UAV attitude estimation using infrared sen-sor[C]∥2010 IEEE/ASME International Conference on Mechatronic and Embedded Systems and Applications,Qingdao,Shandong,China,2010:137-142.
[6]Brisset P,Drouin A,Gorraz M,et al.The paparazzi solution[C]∥Proc of MAV2006,Sandestin,Florida,2006.
[7]Herrmann P,Bil C.Simulation and flight test of a temperature sensing stabilization system[J].Aeronautical Journal,2005,109(1094):167-175.
