玩具自适应金属丝挠曲试验机的研制
2014-09-19徐晓春周莹
徐晓春,周莹
(浙江出入境检验检疫局,浙江杭州311200)
0 引言
毛绒玩具是指用各种布绒经过构思设计、裁剪、缝纫、眼鼻装订、塞制填充各工艺制成的模仿各种动物,专供14岁以下儿童使用的玩具,具有样式新颖、款式多、安全的特点。为了使得玩具看起来更逼真,许多毛绒玩具内藏金属丝。为确保各种不同年龄儿童对玩具的安全使用,我国颁布了GB6675-2003«玩具生产安全强制性标准»,等同于ISO 8124标准,许多国家也都颁布了对毛绒玩具生产的安全标准。如欧洲有EN71标准、美国有ASTN F963标准、日本有ST2002标准等。
通过对多家玩具实验室的调查,很多机构还是沿袭了以前一直采用的手动挠曲+测力计的测试方法,不但力的控制困难,而且测试过程不可控,精度较差。扬州检验检疫局研制的金属丝挠曲试验仪,虽然实现了挠曲试验的自动化和过程监控,解决了人工操作影响试验结果准确性的问题。但是在EN71-1标准8.13条款中明确要求“金属丝在测试中应保持紧绷”,为了满足金属丝在保持绷紧情况下的测试要求,就必须在其上施加一个与其轴向方向相同的拉力,即金属丝实际上是受到了一个由平行于其主轴方向向上的拉力(为了使其在测试时保持紧绷)和一个垂直于自身的推力组成的交变应力。所以在现有的金属丝挠曲试验机中未见有检测手段保证。由材料力学的知识可知,在这样的交变应力作用下,金属丝的疲劳速度会比在仅受垂直部件主轴推力的作用下快得多,会使其在更短的周期内更易发生断裂,从而形成锐尖等危险情况。针对上述结果,可以认为现有的金属挠曲试验机和标准的要求是有差异的,不能完全满足EN71-1标准的要求。研制能自动适应弯曲过程中材料的弯曲变形,并且实时的监控检测过程中力的变化,实现自适应控制,满足EN71-1、ASTM F 963、ST 2002等标准要求的试验设备,对含金属丝的玩具的检测具有现实的意义。
1 设计要求
根据上述标准要求,结合机械设计的具体情况,试验机必须具备驱动环节、测力环节、角度控制环节、装夹环节、自适应机构及控制单元。驱动环节主要是完成钢丝绳的匀速运动,并且可以调速,满足不同速度段的要求。测力环节在运行过程中实时监测力的大小,在力超出设定的范围后,自动停机。角度控制环节主要完成测试过程中角度的控制。自适应装夹环节主要完成在测试过程中的钢丝绳的自动拉直。在此工况下进行测试,满足测试标准要求。
控制器用于对整个测试过程的控制。
2 关键部件的机械设计
2.1 机械结构
根据上述要求,测试设备的总体方案图如图1所示。

图1 测试设备的总体设计图
试验机的机械结构主要由驱动环节、自适应装夹环节、测力环节与夹具等组成。驱动环节由松下伺服MDME400W作为驱动单元,通过连轴器与摆动轴的轴承座相连,由于回转中心要与装夹的中心一致,所以在设计过程中采用了一个转接轴承座。在摆动杆上装有测力装置与自适应装夹装置。电机旋转,通过连轴器带动圆盘转动,圆盘上的偏心装置带动装有测力装置与自适应装置的摆杆摆动,从而带动被测钢丝绳的摆动。
2.2 关键零部件设计
a)测力环节的机械设计
测力环节主要包含玩具金属丝的端部固定,力传感器的安装等。设计结构参见图2所示。
测力环节由安装板、快速夹具、金属丝夹具、可调节螺钉、力传感器等组成。
快速夹具、金属丝夹具、可调节螺钉、力传感器等均安装在板上,快速夹具的头部安装有方形V形块,传感器一端固定在安装板上,另外一端由可调节螺钉连接,可调节螺钉一端固定在传感器上,另外一段固定着V形块的另外一端。用调节螺钉调节,满足不同的直径的玩具金属丝的装夹要求。测力环节安装在自适应装夹环节上(图2)。

图2 测力环节机械结构
b)自适应装夹环节
在挠曲试验项目中,按照EN71-1中关于满足金属丝在保持绷紧情况下的测试要求。即在测试过程中夹具不能对金属丝夹死,能根据金属丝的变形状况进行自动的调整,自动适应变化的长度。
要实现测试过程中金属丝在保持绷紧。就必须在其上施加一个与其轴向方向相同的拉力,即金属丝实际上是受到了一个由平行于其主轴方向向上的拉力(为了使其在测试时保持紧绷)和一个垂直于自身的推力(使其由直立位置向一边弯曲60°,然后向相反方向弯曲120°并做循环)组成的交变应力。在结构上来说,夹持部分采用一种弹性的元器件-弹簧机构,该机构能根据被测试件的变形进行自动的调整[1](图3)。

图3 自适应装夹环节
在该机构中由手动夹具、装夹V型块,直线轴承、拉簧等组成,主要是在试验过程中始终有一个力向上拉,能自动地适应在挠曲过程中因塑性变形而产生的长度的伸长。
3 电气系统
在与金属挠曲试验相关的标准 EN71-1,ASTM F963,ISO8124,GB6675中,均要求测试的力值的大小,这样能控制加载在试件上的力值,同时也是不同的含金属丝玩具能进行比较。标准规定:“力值最大是“70 N±2 N”,如果力值未达到70 N±2 N而金属丝已经弯曲到60°,则反向施力”[2]。这要求在进行测试过程中至少具有两个传感器,一个为角度传感器,另外一个为力传感器。当力传感器达到规定力值而角度传感器未检测到规定角度时,就可以进行判别,当力值<70 N±2 N,角度值到达60°时,就可以进行疲劳试验,同时实时的监测力值的与角度的大小[1,4]。角度的控制采用2个限位传感器控制系统的框图如图4。系统采用松下公司的C38AT PLC,实现对上述流程的控制。控制系统的硬件如图5所示。

图4 自适应控制原理图

图5 控制系统的硬件
除了计算机硬件之外,主要是软件流程,所以编制软件相当重要。软件的编制遵循松下PLC的软件编写方式,采用RS232与触摸屏进行通信。软件主要的流程图如图6所示。
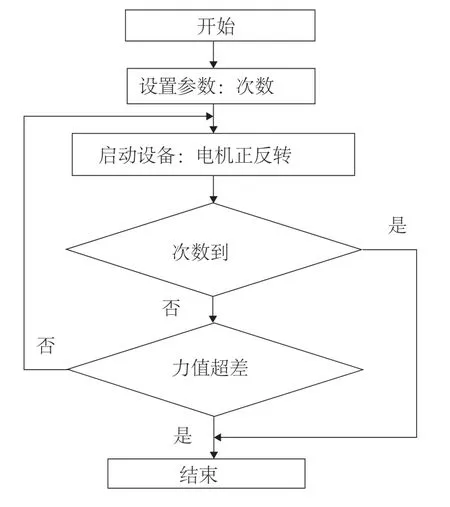
图6 软件流程图
4 实验
实验采用的样品为长毛猴手臂的金属丝,测试设备采用研发完成的设备,测试实验是对测试的过程中的角度进行控制,对测试过程中的力值进行监控。被测试件与测试设备参见图7,图8。测试结果参见表1。满足 EN71-1、ASTM F 963、ST 2002 等标准的要求,测试结果表明,试验机完全满足设计要求,对含金属丝的玩具的自动检测具有重大而现实的意义。

图7 被测试件

图8 金属丝挠曲试验机

表1 测试结果

续表1
结果表明,测试过程中设备能对力值实施实时的监控,能及时判断被测试件的失效。同时,从实验数据看出,角度的误差控制在0.6°以内,满足标准规定的误差控制在1°之内的要求。
5 结语
运用机械设计的理论与手段,研制了一种新型的金属丝挠曲试验机,能自动适应弯曲过程中材料的弯曲变形,并且实时的监控检测过程中力的变化,实现自适应控制,
[1]成大先.«机械设计手册»[M].北京:化学工业出版社,2010.
[2]陈永浦.«电子工程师手册»[M].北京:科学出版社,2011.
[3]EN 71-1998 8.13欧州玩具安全标准(金属丝的挠曲性)[S].2003.
[4]王琪黄玲.微机在玩具金属丝挠曲性试验机中的应用[J].微机电系统,2003,23.
