火电厂功率低频振荡的预防与解除研究
2014-09-19张建辉刘友宽阮玖圣李晓娇高东磊
张建辉,刘友宽,阮玖圣,李晓娇,高东磊
(1.云南电网电力研究院,云南 昆明 650217;2.华北电力大学 控制与计算机工程学院,河北 保定 071003)
0 引言
近年来,随着高放大倍数快速励磁的广泛采用,电网的运行趋于稳定极限,由此产生的低频振荡将会造成电力系统稳定性下降。例如:在西南、华北、东北等电力系统中,多次记录到电力系统低频振荡,甚至在很多时候危及系统的稳定运行[1]。电力系统是由电网和电厂构成的整体,电厂锅炉的动态特性和汽轮机调速系统直接影响发电机的出力,进而影响整个系统的运行状态。目前研究低频振荡往往局限在电网层面,是假定电厂出力不变来孤立地研究电气系统。但是发电厂的出力是时刻变化的,如果汽轮机系统的蒸汽压力长时间脉动,当脉动频率达到电力系统的固有频率时,则将产生大幅的低频振荡,诱使保护误动作,危及系统的安全稳定运行。文献[2~3]指出,扰动源可能存在于汽轮机环节中,控制阀和主蒸汽压力如果发生周期性的波动,有可能会导致汽轮机输出功率发生同频率波动,导致系统发生大幅度的强迫功率振荡,诱使保护误动作,危及系统的安全稳定运行。
本文从理论角度分析了火电厂原动机侧存在的几种振荡源;针对存在的这两种振荡源,分别提出了阀门非线性校正和考虑主汽压力扰动的功率适应控制这两种方案来预防功率振荡[4];并且在云南巡检司电厂MAXDNA的DCS控制系统上对上述方案的正确性与可行性进行了现场试验验证。另外,本文还在DCS系统上编制功率振荡判据程序,用来实时地监测汽轮机实发功率和功率设定值信号,当机组功率发生低频振荡时可以及时地发出报警信号并切断机组功率闭环控制,进而快速消除振荡。
1 高调门的非线性校正
1.1 研究背景
在巡检司进行的阀门试验过程中发现,当机组运行在单阀方式下时,实际流量、跟踪流量指令的线性度较好;但顺阀方式下,实际流量与流量指令存在着很大的偏差,这说明需要对顺阀工作模式下的流量指令分配程序进行线性化优化,从而保证阀门管理的流量指令与汽轮机实际流量输出具有较好的线性度。
1.2 配汽原理
流量指令可在机组负荷控制时手动给定或由功率调节器运算产生。流量背压修正函数F(X1)是机组流量需求与流量指令的修正函数[5]。由汽轮机的自身特性所决定,流量比例偏置 (K+B)和GV流量修正函数F(X2)确定各高压调节门在顺序阀控制方式下,调门的开启顺序、重叠度及流量指令。单阀方式下,流量指令均分至4只高压调节阀上;顺序阀运行时,汽轮机的流量指令 (FDEM)经过背压修正、比例偏置修正、GV流量修正、GV流量开度函数修正后,产生各个GV的开度指令。配汽过程如图1所示。

图1 阀门管理程序
1.3 配汽曲线的辨识与校正
将图1所示的配汽过程当做“黑箱”,其输入为流量指令X,输出为4个高调门的开度Y。试验过程分别在单阀和顺阀方式下进行,由热控人员从0给定流量指令X,以递增方式强制至100,并记录4个高调门的阀位反馈Y。试验数据见表1所示。
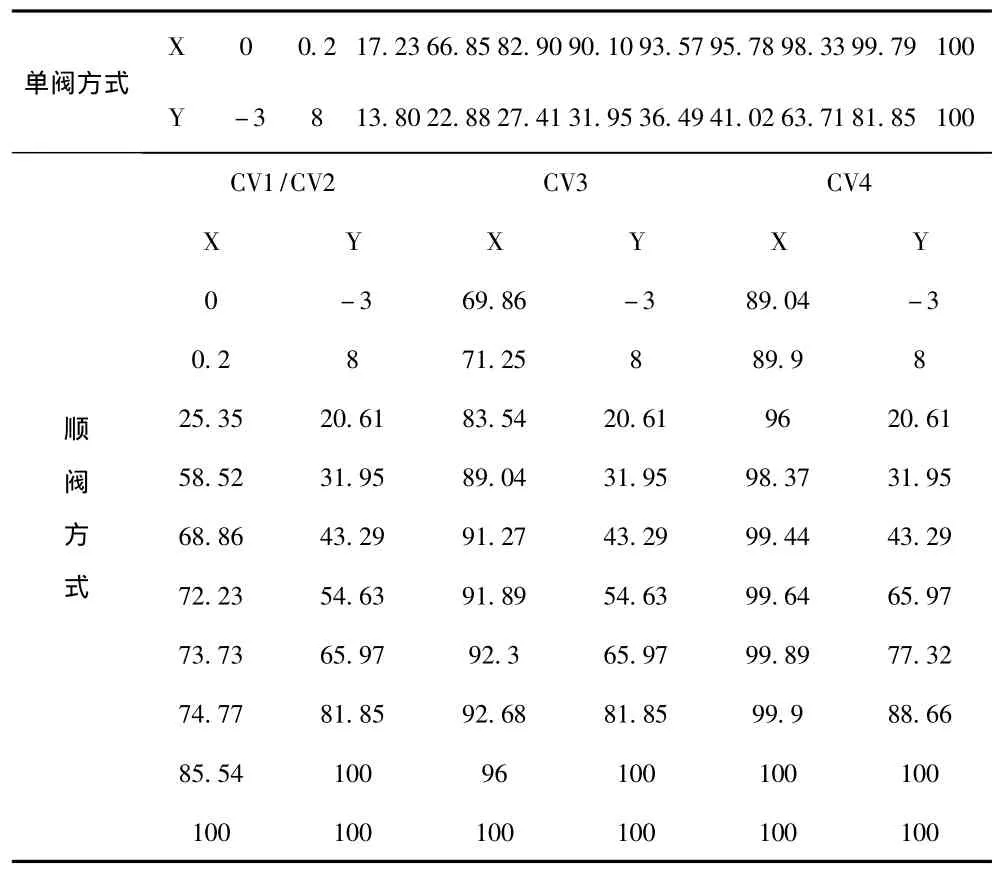
表1 阀门数据库历史数据
将表1的数据进行拟合后得到单阀、顺阀方式下的配汽曲线,如图2所示。
前文已经提到,单阀的配汽程序不需要优化,顺阀的配汽程序需要优化,具体的优化过程如下所示。

图2 单阀/顺阀配汽曲线
流量指令X按如下方式分配,形成4个高压调节阀的流量指令Xi(0≤Xi≤100,i=1,2,3,4):
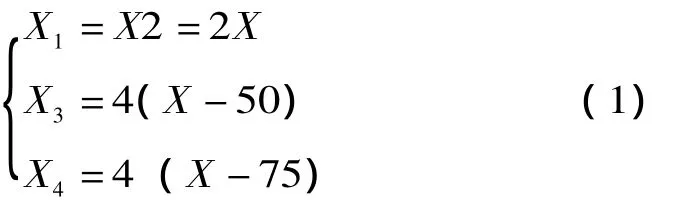
流量指令Xi经过阀门开度流量修正曲线F(X3)(图2左图的单阀配汽曲线)后得到顺阀方式下4个阀门的开度指令Yi。
单、顺阀切换过程中的阀门开度指令Yi计算过程如下:
流量指令X同时送到单阀控制回路和顺序阀控制回路,两个回路都进行计算,分别得到纯单阀和纯顺阀方式下的阀门开度指令Yi单和Yi顺。

经过上述的配汽程序优化后,顺阀方式下的新的配汽曲线辨识结果如图3所示。

图3 非线性校正后的阀门配汽曲线辨识
1.4 现场应用
云南巡检司电厂采用的是两台300 MW循环流化床锅炉,其DCS平台为上自仪的MAXDNA控制系统。试验过程在其控制系统上进行,对阀门工作在不同模式下进行上述方案的验证,如图4~7所示。试验结果表明,对阀门原有的阀门配汽程序进行线性优化之后,主蒸汽流量跟踪流量指令的效果很好,实现了流量指令与实际流量的线性化,进而避免了负荷波动。试验结果如图6~7所示 (流量指令用流量参考值表示,实际流量用线性化综合阀位来表示)。
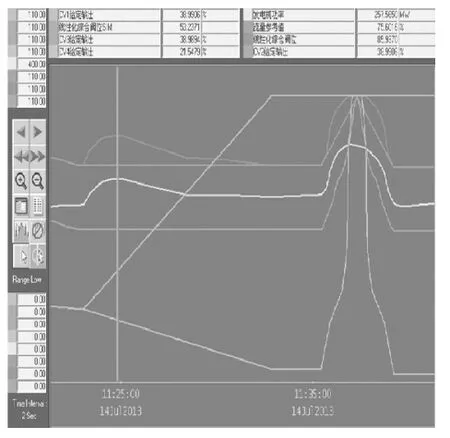
图5 单切顺 (优化前)

图6 顺阀 (优化前)

图7 顺阀 (优化后)
试验结果分析:
(1)单阀的综合阀位指令变化与阀位线性化高度一致,如图4所示。
(2)在原DEH算法下,单阀切换为顺序阀时,功率产生较大扰动,如图5所示。
(3)在原DEH算法下,顺序阀方式时,流量参考值与线性化综合阀位存在偏差,如图6所示。
(4)原DEH算法优化后,顺序阀方式时,流量参考值Y与线性化综合阀位高度一致,如图7所示。
2 考虑主蒸汽压力扰动的功率自适应PID控制
2.1 主汽压对机组功率的影响
根据文献[6~7]可知,对于凝汽式中间再热汽轮机组,主蒸汽压力变化引起的机组功率的相对变化量的计算式为:

式中:P0为主汽压MPA;Pi为功率,MW;v0为主蒸汽比容,m3/kg;Pgp为高压缸排气压力,MPA;K为过热绝热指数,对于过热蒸汽有K=1.3;Pz为排汽压力,MPa。
为了定量地获得由主蒸汽压力变化引起的机组功率的变化相对量,这里假定机组的额定功率为330 MW且工作在90%额定工况下,其中间量的近似取值:P0为16.6MPa;Pgp为3.7MPa;Pz为0.009MPa
将上述取值代入到式 (3)中,就可以得到330 MW机组工作在90%额定工况下及运行在300 MW时,由主蒸汽压力变化引起的机组功率的变化相对量,公式如下:

因为ΔPi=300-Pi,ΔP0=16.6-P0,所以可以简为:

至此,近似得到了330 MW机组工作在90%额定工况下,主汽压和实发功率的单值对应关系,如式 (5)所示。
2.2 考虑主汽压力扰动的功率自适应PID建模仿真
为了验证功率自适应PID控制能否有效抑制主汽压力扰动对功率的影响,首先在Matlab/Simulink软件里对汽轮机功率控制回路建立整体模型,并且将对功率影响较大的主汽压力因子按照式 (5)加入到控制回路里,同时在常规PID控制回路的基础上添加PID参数自适应控制策略,于是得到了一个考虑主汽压力扰动的功率自适应PID控制回路模型 (如图8所示)。

图8 基于PID参数自适应控制的汽轮机功率控制回路模型
由于此模型考虑了主汽压力扰动因子,所以在仿真中可以进行主汽压力扰动下的功率常规PID控制和PID自适应控制两种控制方案的调节效果对比分析,仿真结果如图9所示。

图9 PID参数自适应控制下的功率输出
从图9可以看出,当300~500 s之间存在主汽压扰动时,功率输出趋于稳定,并没有产生大的幅值变化。经过放大图片后可以发现,幅值在295~302 MW之间连续变化,上下幅值差只有7 MW,比常规PID控制时的70 MW的幅值波动小了很多,回路的抗干扰能力大大增加,功率输出平稳,机组运行经济性显著增强。
2.3 现场应用
试验之前,首先在DCS控制系统中将常规的功率调节PID替换为PID参数自适应控制器。改进后的控制器可以实时地检测主汽压力的变化情况,从而进行自身参数的调整改变,最终使功率输出平稳。试验过程在单阀方式运行,由运行人员将ADS目标负荷从270 MW降至120 MW,滑压方式下主汽压力从16.7 MPa降至7.14 MPa,伴随着主汽压力的大幅扰动,观察功率的输出情况,如图10所示。

图10 自适应PID控制下的功率输出
将功率自适应PID控制器还原为原有常规的PID控制器后,进行单阀方式下的升负荷试验,试验过程与上述降负荷过程相反,同理,伴随着主汽压力的大幅扰动观察功率的输出情况,如图11所示。

图11 常规PID控制下的功率输出
试验结果表明,常规PID控制下的升负荷试验中,功率发生振荡,振荡周期为2.75 s,幅值波动为-43~36 MW。而功率自适应PID控制能够抑制主汽压力扰动对功率的影响,保证功率输出平稳。
3 功率振荡判据
3.1 算法原理
首先,周期性地检测实发功率P和功率设定值 P_set的最大最小值 P_max,P_min,P_set_max,P_set_min,用特征值Y表示方法为:Y=(P_max-P_min)-(P_set_max-P_set_min),门槛值记为X(具体数值由热控人员设定)。如果检测周期内Y≥X,则触发计数器的置位端,计数器输出1,否则触发复位端,计数器输出置0。如果连续3个周期满足Y≥X,则计数器输出累加到3,程序判断为功率发生振荡,此时由程序输出保护动作信号,切除相应的机组功率控制回路,快速消除振荡。算法原理图如图12所示。

图12 功率振荡判据原理
3.2 现场应用
按照上述算法原理,在巡检司电厂MAXDNA的DCS控制系统上编程组态,完成振荡判据的DCS实现。为防止程序漏报或误报,组态过程中编制了两套程序,一套用于小周期检测,一套用于大周期检测,当其中任何一套程序输出报警时,程序则判断出现了功率振荡;当两套程序均未输出报警时,程序则判断功率未发生振荡。试验过程和结果如下。
加入功率自适应PID控制,功率测量回路的滤波时间常数设置为6 s。通过不断地改变功率PID调节器的比例系数KP,使实发功率发生临界等幅振荡,期间功率设定值恒定不变。判据的实现结果如图13所示。

图13 功率设定值恒定时的功率振荡判据实现
强制转速偏差信号1转和11转数十次,模拟多次一次调频动作幅度为±18 MW的振荡,观察功率输出是否较好的跟踪设定值的变化。实现结果如图14所示。

图14 功率设定值变化时的功率振荡判据实现
从图13可以看出,振荡判据程序能及时地检测出功率发生振荡,输出报警信号;从图14可以看出,当添加一次调频动作,功率设定值发生±18 MW振荡时,功率能够较好地跟随设定值的变化,判据未发出报警信号。综上所述,试验证明了振荡判据的有效性与可靠性。
4 结论
针对近些年火电厂多次发生的低频功率振荡现象,本文从电厂原动机侧找到了可能引发电网发生低频功率振荡的两种扰动源,分别是阀门非线性和主蒸汽压力的周期性脉动;在此基础上进行了阀门非线性校正和功率的自适应PID控制的研究,从而有效地降低了功率发生低频振荡的概率。当预防措施失效,功率最终还是发生低频振荡时,为了解除振荡,本文编制了功率振荡判据,以实时地检测功率变化情况;当功率发生低频振荡时及时地输出报警信号,切断汽轮机功率控制回路,快速消除振荡。经过现场的多次试验验证,本文中提到的方案具备可行性,在功率低频振荡的研究中具有一定的指导意义。
[1]党杰,董明齐,李勇,等.基于WAMS录波数据的华中电网低频振荡事件仿真复现分析[J].电力科学与工程,2012,28(4):19-23.
[2]徐衍会,贺仁睦,韩志勇.电力系统共振机理低频振荡扰动源分析[J].中国电机工程学报,2007,27(17):83-87.
[3]韩志勇,贺仁睦,徐衍会.由汽轮机压力脉动引发的电力系统共振机理低频振荡[J].中国电机工程学报,2005,25(21):14-18.
[4]黄顺礼.大型发电机低频振荡的现场处理经验[J].电力科学与工程,2003,(2):72-73.
[5]刘友宽.国产300 MW汽轮机阀门管理控制优化研究[R].昆明:云南电网电力研究院,2009.28-30.
[6]董丽娟,张春发,张燕.汽轮机背压变化对机组功率增量的影响[J].电力科学与工程,2006,(1):37-41.
[7]王艳军,吴彦坤,张春发.主蒸汽参数变化对机组功率影响的定量研究[J].热力透平,2007,36(3):164-167.
[8]刘友宽.一种防止火电机组功率调节振荡的控制方法[P]. 中国专利:201210212880,2012-10-24.
