基于3D Max-median 和3D Max-mean滤波的红外小目标检测
2014-09-18苏泽林高陈强
苏泽林,高陈强
(重庆邮电大学信号与信息处理重庆市重点实验室,重庆 400065)
红外小目标检测在军事、民用领域有广泛的应用。由于在红外图像采集、转换、传送过程中,背景杂波、仪器自身的噪声等影响,获得的数据一般都是信噪比较低的图像,目标像素值较周边像素值较低。因此,红外小目标检测是一个研究的重点和难点。目前主要是从以下几个方面来进行红外小目标的检测:基于空域的检测、基于时域的检测[1]、基于时空域相结合的检测方法[2]。在空域一般都是根据目标的某些特性进行检测,如背景的复杂程度、目标的轮廓大小等。时域检测根据多帧累计,再利用目标的连续性和运动特性来进行检测,但是在检测过程中会受到背景复杂度的影响,而且当目标运动速度过快时,检测也会受到影响。时空域相结合的检测,虽然结合了在时域和空域检测的优点,但却增加了计算量。在以上三种方法的基础上,又提出了很多的算法,如形态学滤波[3]、3D匹配滤波、神经网络滤波、小波变换等,然而由于这些方法计算的复杂度很高,不适于实时系统。根据这些情况,本文提出了一种改进性的基于时空三维的最大中值滤波技术。首先,在三维时空中,根据前后两帧图像对中间帧进行3D max-median或3D Max-mean滤波,滤除杂波和背景;其次,进行阈值分割进一步剔除杂波点;最后,归一化确定目标运动轨迹。仿真实验表明该算法可以有效地检测出目标。
1 改进的Max-median和Max-mean滤波
1.1 Max-median 和 Max-mean 滤波[4]
最大中值滤波和最大均值滤波都是一种非线性平滑技术,通过将每一像素点的灰度值设置为该点某邻域窗口内沿不同方向的中值和均值的最大值,其可以很好地保护细节信息,是经典的平滑噪声的方法。算法通常是在一幅L×L的二维数字图像上,取一个大小为2M+1的窗口内(L远大于M),分别沿水平、垂直、2个对角线方向分别求每条线上的中值或均值,再分别取其最大值作为窗口中心点的像素值,具体描述如式(1)和式(2)所示
Max-median输出为

式中:z1=median{x(m,n-N),…,x(m,n),…,x(m,n+N)};z2=median{x(m-N,n),…,x(m,n),…,x(m+N,n)};z3=median{x(m+N,n-N),…,x(m,n),…,x(m-N,n+N)};z4=median{x(m-N,n-N),…,x(m,n),…,x(m+N,n+N)}。

Max-mean 输出为式中:z1=mean{x(m,n-N),…,x(m,n),…,x(m,n+N)};z2=mean{x(m-N,n),…,x(m,n),…,x(m+N,n)};z3=mean{x(m+N,n-N),…,x(m,n),…,x(m-N,n+N)};z4=mean{x(m-N,n-N),…,x(m,n),…,x(m+N,n+N)}。
虽然Max-median和Max-mean能够检测出红外运动小目标,但是在复杂背景条件下检测目标时,有很多的杂波点,且其每次只是处理单幅图像,这样并没有充分考虑到目标在帧之间的运动特性。为此,本文在文献[4]的基础上将Max-median和Max-mean算法从二维推广到三维来检测红外运动小目标。
1.2 3D Max-median 和 3D Max-mean 算法
基于上述分析,本文提出了改进型3D Max-median和3D Max-mean算法。本文依次取第N-1,N,N+1帧的3帧图像。以第N帧图像中的E点为中心定义一个n×n×n立体结构,在这个结构内依据E点周围(n×n×n)-1个邻近像素值来求出E点的像素值,本文中取n=3,如图1所示。
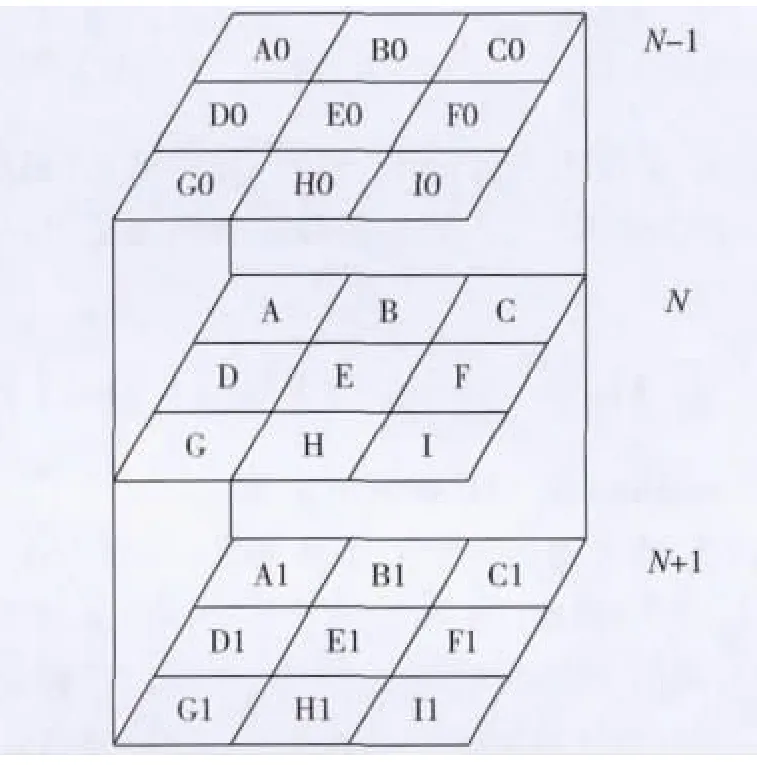
图1 3×3×3立方体结构图
利用多帧图像的运动信息,在3×3×3立方体结构内,沿不同方向穿过中心点E的有向直线共有13条,依次表示为a1,a2,…,a13,在每条直线上有3个像素点,分别求出每条直线上3个像素值的中值,再取这些中值的最大值,即可求得E点的像素值,具体步骤如下
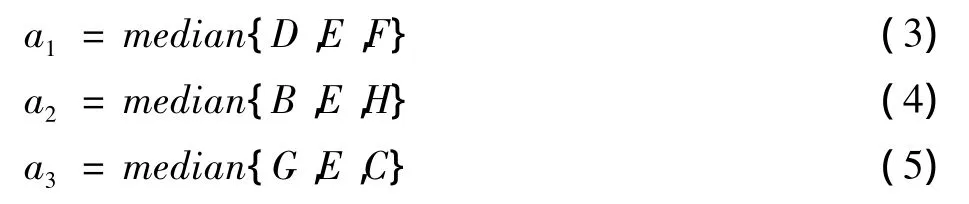
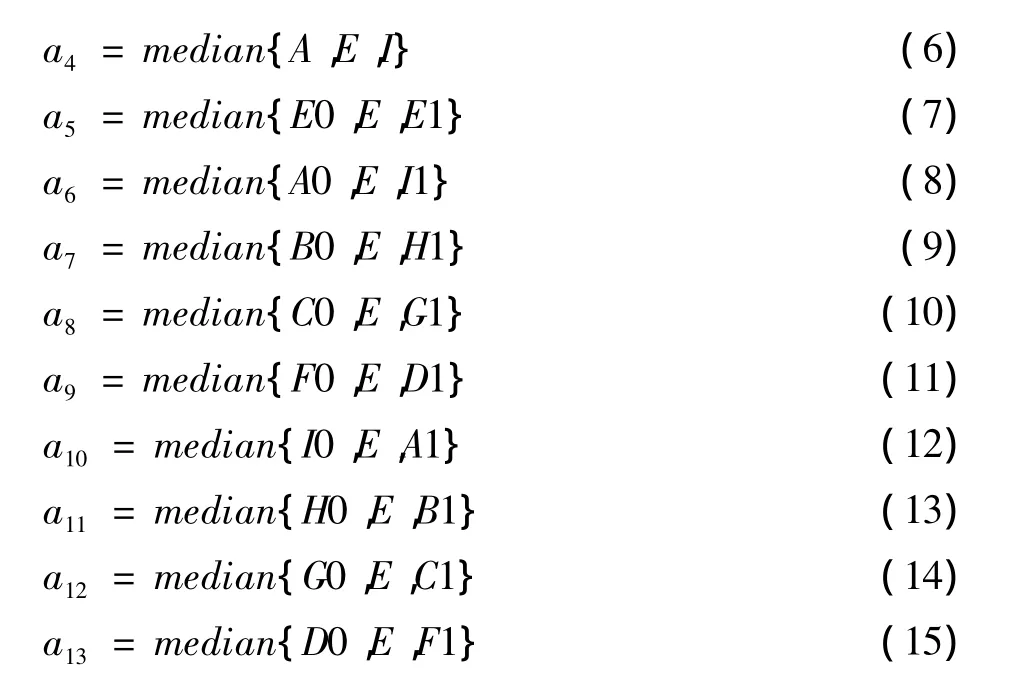
式中:a1表示经过D,E,F这3个像素点的中值,则a1,a2,…,a13依次类推即可求出分别对应的中值,最后取a1,a2,…,a13这13个值中的最大值即为E点的像素值。
3D Max-median的输出为

采用类似的方法,经过中心点E的13条有向直线,分别表示为b1,b2,…,b13,求出b1,b2,…,b13的均值,再取其中的最大值可得到3D Max-mean的输出

通过这种结构元素对图像进行处理,不仅考虑到目标在前后帧运动关联的特性,而且可以有效地抑制噪声,突出目标点。
1.3 检测算法流程
1)输入N帧图像序列,将每帧输入图像表示为I(i,j,k),其中k表示帧数。
2)对输入后的图像进行3D Max-median或3D Maxmean 处理,得到图像f(i,j,k),再对滤波后的图像f(i,j,k)进行背景抑制:fH(i,j,k)=I(i,j,k)-f(i,j,k),fH(i,j,k)表示背景抑制后的第k帧图像。
3)对背景抑制后的图像阈值处理。

式中:fb(i,j,k)表示抑制后的第k帧背景图像;阈值T=μ+l·σ;参数l根据实验情况来确定,通常取4~9,本文中取l=7(海天背景下)和l=7.5(天空背景下),其中μ为均值,σ为方差
4)遍历整个N帧序列图像,如果k<N,继续步骤2)和 3),则g(i,j,k)=f(i,j,k)-fb(i,j,k),g(i,j,k)为分割后的目标图像。
5)根据分割后的目标图像g(i,j,k),为了更有效地检测出目标,再逐帧归一化。此处将各个像素数据映射到0~1范围内。其中大于0.5的数置为1,小于0.5的置为0。数据归一化如式(8)所示。其中min(g(i,j,k))表示第k帧中在坐标点(i,j)处的最小值,max(g(i,j,k))表示第k帧中在坐标点(i,j)处的最大值,T(i,j,k)为归一化后的图像

6)将归一化的各帧图像叠加即可得到目标运动轨迹。
2 实验结果及分析
为了验证改进算法的有效性,分别获取了20帧在天空背景下含有单个运动目标的红外序列图像和20帧在海天背景下含有二个目标点的红外序列图像,其中目标的运动速度也不一样,并将其与Max-mean和Max-median滤波方法[4-5]进行比较。
实验1获取20帧在复杂天空背景下的红外序列图像,图像大小为200×256,目标运动速度大于1像素/帧,如图2所示,在天空背景下,背景中含有大量的云层杂波。
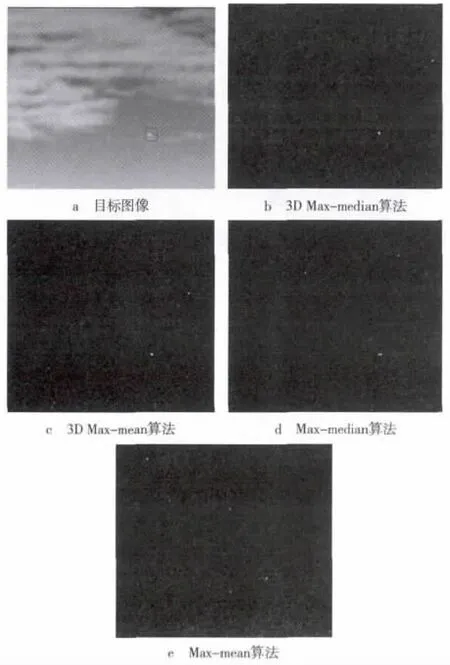
图2 天空背景下各种算法的检测结果
实验结果表明在天空背景下快速运动且信噪比较大的小目标,3种算法都能够有效地检测出目标点。从图中可以看出,本文算法的检测效果较好。因为Max-mean和Max-median虽然检测出了目标,但是在云的边缘和云层较厚的地方依然存在少量暗的杂波点。
实验2取20帧在海天背景下的红外运动小目标图像,大小为228×280,目标运动速度小于1像素/帧,如图3所示,取在海天背景下的一帧图像,其中含有2个目标点,目标1是虚假的目标点,目标2是真实的运动目标点。
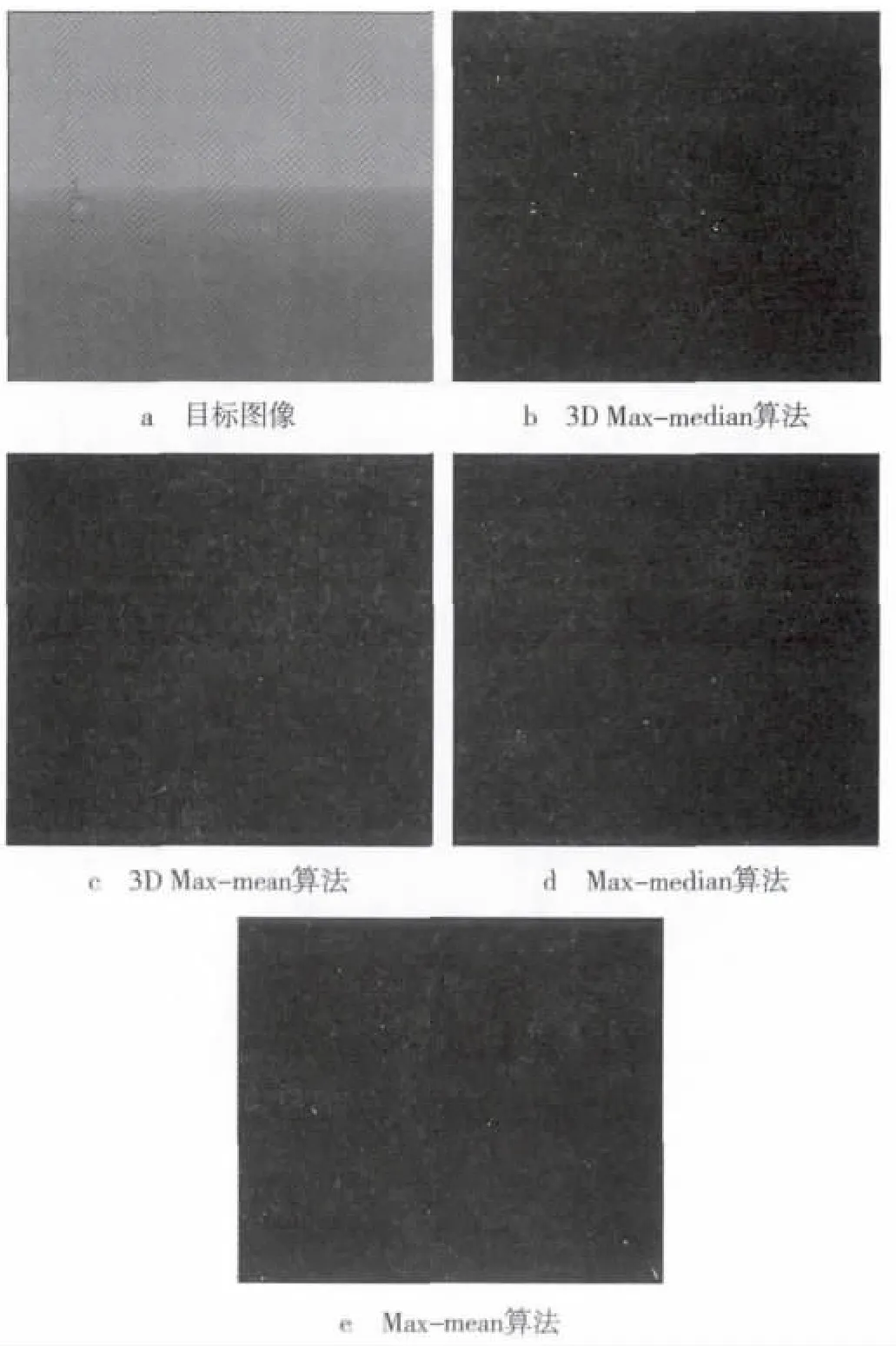
图3 海天背景下各种算法的检测结果
实验结果表明,对在海天背景下慢速运动且信噪比较小的目标,本文算法依然能够检测出目标图3b和图3c,而Max-mean和Max-median的检测中依然含有很多的杂波点。
依照前面介绍的算法步骤,最后归一化就可以确定出目标运动轨迹,如图4所示。其中图4a是在天空背景下的运动小目标,图4b是在海天背景下,检测到2个目标点:一个是静止的虚假目标点,可剔除;根据目标运动轨迹,另一个是真实的目标点。
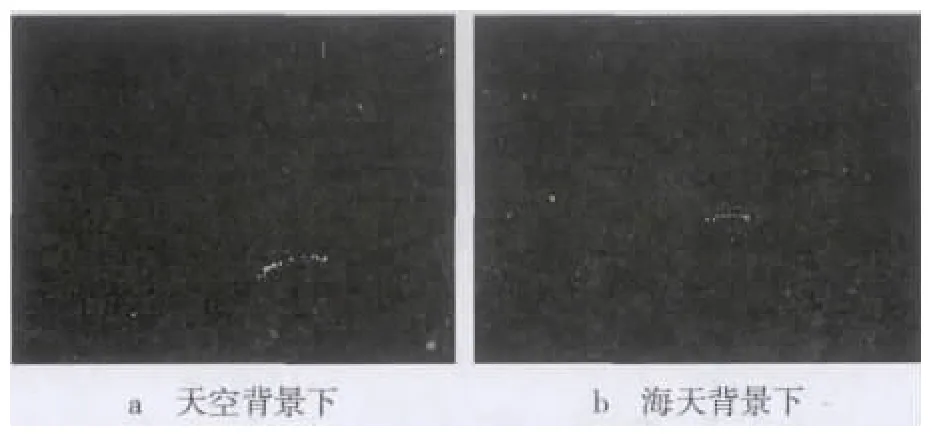
图4 两种背景下的目标运动轨迹
为更准确地评价本文算法的性能,定义序列图像检测率Pd和平均虚假数Pn为

式中:Nr为序列中检测到的真实目标个数;Nt为序列中实际真实目标个数;Nf为序列中检测到的虚假目标个数;N为序列帧数。取20帧在天空背景下的红外序列图像,其中含有一个目标点。20帧在海天背景下的红外序列图像,其中含有2个目标点,一个为虚假的目标点。再根据式(20)和式(21)分别对3种算法的检测率、平均虚警数进行了计算,结果如表1所示。从表1中可以看出,文中提出的算法,不仅提高了检测概率,而且大大降低了平均虚警数,性能优于其他两种算法。
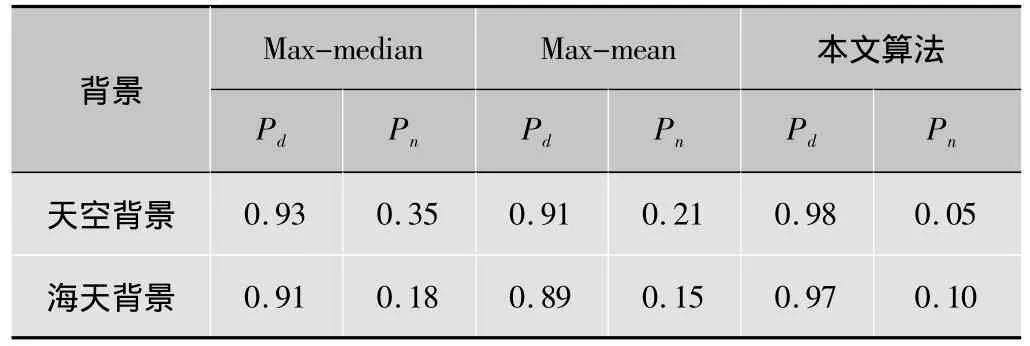
表1 本文算法与Max-mean和Max-median算法的检测结果比较
3 结论
针对红外运动小目标的检测,本文提出了一种新的基于时空域的检测算法。经过实验验证,改进的3D Maxmedian算法能更有效地检测出低信噪比情况下红外图像序列中的运动小目标。该方法通过结合前后两帧的信息来确定中间帧,这样不仅考虑到了目标的时域特性,同时也考虑到了空域性,且不受目标尺寸的限制,而且算法原理简单,运算处理速度也较快,适用于实时和多目标的检测。
:
[1]高陈强,田金文,王鹏.基于时域特性分析的红外运动小目标检测算法[J].红外与激光工程,2008,37(5):907-901.
[2]张媛,辛云宏,张春琴.基于时空联合滤波技术的缓慢运动红外弱小目标检测算法[J].光子学报,2010,39(11):2049.
[3]BAI X,ZHOU F,JIN T.Enhancement of dim small target through modified top-hat transformation under the condition of heavy clutter[J].Signal Processing,2010,90(5):1643-1654.
[4]DESHPANDE S D,MENG H E,VENKATESWARLU R,et al.Max-Mean and Max-Median filters for detection of small-targets[EB/OL].[2013-05-16].http://proceedings.spiedigitallibrary.org/proceeding.aspx?articleid=905421.
[5]TZANNES A P,BROOKS D H.Temporal filters for point target detection in IR imagery[EB/OL].[2013-05-16].http://proceedings.spiedigitallibrary.org/proceeding.aspx?articleid=925227.