行人检测技术研究综述
2014-09-18张春凤宋加涛王万良
张春凤,宋加涛,王万良
(1.浙江工业大学计算机科学与技术学院,浙江杭州 310023;2.宁波工程学院电子与信息工程学院,浙江宁波 315016)
1 行人检测方法分类
行人检测即判断输入的图像或视频序列中是否出现行人,并确定其位置,该技术可广泛应用于智能交通中的车辆辅助驾驶系统[1-6]、人体行为分析[7-10]、机器人开发[11]、视频监控[12-14]等领域。由于人体姿态各异,衣着变化多样,场景中经常存在光照变化、气候变化以及景物遮挡等因素,行人检测业已成为计算机视觉领域中一个既具有研究价值、同时又极具挑战性的热门课题。目前国内外已有很多关于行人检测的报道[3-5,9]。本文从现有各种行人检测方法所采用的行人描述特征着手,将现有方法分为基于全局特征的方法、基于人体部件特征的方法和基于立体视觉特征的方法三大类(如图1所示),分别对其中较具代表性的方法进行评述,同时介绍目前常用的行人数据库的特点,最后分析了行人检测技术中存在的难题并对未来的发展做出展望。
2 现有行人检测方法
2.1 基于全局特征的方法
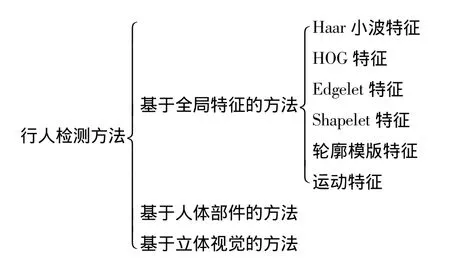
图1 行人检测方法分类
该类方法是目前较为主流的行人检测方法,主要采用边缘特征、形状特征、统计特征或者变换特征等图像的各类静态特征来描述行人,其中代表性的特征包括Haar小波特征、HOG特征、Edgelet特征、Shapelet特征和形状轮廓模板特征等。近年来许多研究者也逐渐将行人的运动信息应用于行人检测,取得了较好的效果。
2.1.1 基于Haar小波特征的方法
Papageorgiou和Poggio[15]最早提出Harr小波的概念;Viola等引进了积分图的概念[16],加快了Harr特征的提取速度,并将该方法应用于行人检测[17-18],结合人体的运动和外观模式构建行人检测系统,取得了较好的检测效果,为行人检测技术的发展奠定了基础。此后,大量采用Haar小波特征的改进行人检测方法被提出[19-21]。
2.1.2 基于HOG特征的方法
Dalal和 Triggs[22]在 2005年提出梯度方向直方图(Histogram of Oriented Gradients,HOG)的概念,并将其用于行人检测,在MIT行人数据库[15]上获得近乎100%的检测成功率;在包含视角、光照和背景等变化的INRIA行人数据库[22]上,也取得了大约90%的检测成功率。HOG是目前使用最为广泛的行人特征描述子。Zhu等人[23]提出积分直方图的概念,加速了HOG特征的计算,并通过计算多尺度HOG特征,结合Adaboost算法构建级联分类器,建立了一个快速的行人检测系统;Qu等人[24]提出无背景情况下的HOG特征的概念,既消除了通常情况下背景因素对目标HOG特征的影响,又加速了HOG特征提取的速度,实验表明该方法在处理视频中的行人检测时,效果好于基于传统HOG特征的方法;Wang等人[25]将HOG特征与局部二值模式(Local Binary Pattern,LBP)相结合,用于存在部分遮挡情况下的行人检测,使用线性支持向量机(Linear Support Vector Machine,SVM)作为分类器,在INRIA行人库上取得了97%的检测率,但是它的高运算复杂度也限制了实时应用。
2.1.3 基于edgelet特征的方法
B.Wu等人[26]提出了“小边”(Edgelet)特征的概念,即一些短的直线或者曲线片段,如图2b所示,并将其应用于复杂场景的单幅图像的行人检测,在CAVIAR数据库上取得了大约92%的检测率。文献[27]将Edgelet特征用来对已知类别的物体进行检测和分割,取得了较好的效果。Edgelet特征的优点是:1)受光照影响较小;2)利用边缘的强度和方向信息能够较有效地剔除背景中与Edgelet在形状上相似的边缘;3)只需存储片段的位置和方向信息,故所需存储空间较小,匹配计算也较简单;4)对行人存在遮挡以及视角、姿态的变化更不敏感。缺点是由于每个Edgelet特征需要手动标定,所以比较耗时费力,而且对于一些本身较复杂的曲线,很难通过手工标定的方法来得到完全符合人体曲线的“小边”特征。
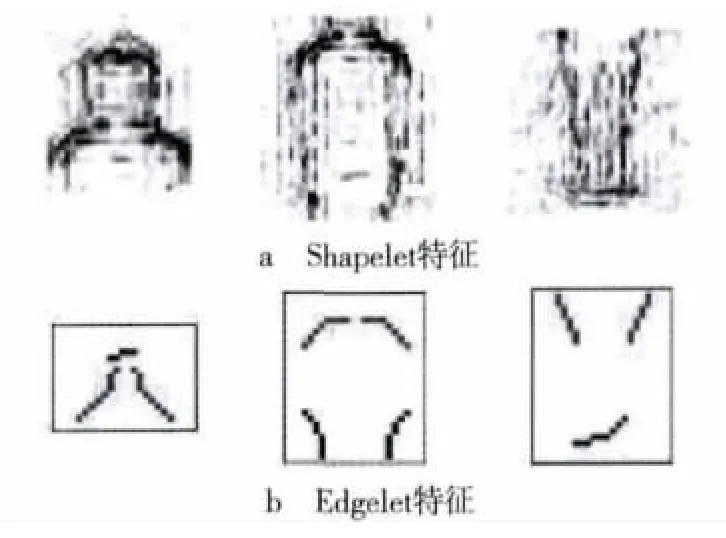
图2 人的头肩、躯干和腿部的Shapelet和Edgelet特征
2.1.4 基于Shapelet特征的方法
针对上述 Edgelet特征存在的缺点,Sabzmeydani[28]在2007年提出了一种可以利用机器学习的方法自动得到的特征,即Shapelet特征。该算法首先从训练样本提取图片不同方向的梯度信息,然后利用AdaBoost算法进行训练,从而得到Shapelet特征。
图2给出了人的头肩、躯干和腿部的Shapelet特征和Edgelet特征。从中可以看出,Shapelet特征与人体曲线更符合,能够更好地描述人体特征。文献[28]基于Shapelet特征在INRIA数据集上取得了90%的行人检测成功率,而误报率只有 FPPW=0.01%。Yao等[29]利用 Shapelet特征训练得到一个全身检测器,该算法优于基于Haarlike特征的部分检测器;他们进一步将上述两种检测器相结合构成一个行人检测系统,在INRIA数据集上取得了95%的行人检测率,检测效果优于单独使用其中任何一个检测器的情况。
2.1.5 基于轮廓模板的方法
该方法是指利用图像中目标物体的边缘轮廓、纹理和灰度等信息构建模板,通过模板匹配的方法检测目标。Gavrila等[30]较早提出了基于人体边缘轮廓的模板识别方法用以检测行人;文献[31]在此基础上将人体的形状特征与边缘信息相结合来更好地表示人体外观。基于形状轮廓的检测方法简单易行,由于它只在原始图像数据上进行运算,不需要对图像进行分割和特征提取处理,从而保留了图像的全部信息。缺点是由于行人姿态各异,故需要构建大量的形状模板才能取得较好的匹配效果,而且可能出现分类错误。
2.1.6 基于运动特征的方法
近年来一些学者尝试将目标的运动信息加入到行人检测系统中[32-34],并与其他静态特征相结合用于检测行人。其中较具代表性的算法包括:1)Viola等人[18]针对摄像机静止的情况提出在不同图像上计算Haar-like特征,然后将运动信息与图像的灰度信息相结合构建行人检测系统。该方法检测速度为4 f/s(帧/秒),误检率较低,而且适用于雨雪天气等恶劣气候条件下低分辨率场景的行人检测,但对于行人被遮挡的情况检测效果较差;2)Dalal等[35]针对摄像机运动的情况,提出将基于外观的梯度描述子和基于运动的差分光流描述子相结合来构建行人检测器,但该方法只对单个窗口的检测比较有效,对于整幅图像检测效果则很差。文献[19]对所采用的运动特征进行了适当的修改,解决了这一难题。
2.2 基于人体部件的方法
该类方法的基本思想是把人体分成几个组成部分,然后对图像中每部分分别检测,最后将检测结果按照一定的约束关系进行整合,最终判断是否存在行人。目前已有一些较有效的算法[36-39]。Mohan 等[40]将人体分为头肩部、腿部以及左手臂和右手臂4个部分,然后使用Harr小波特征训练SVM检测器。Mikolajczyk等[41]将人体分成正面的人脸/头部、侧面的人脸/头部、正面和背面的头肩部、侧面的头肩部以及腿部,然后对每个部分采用SIFT(Scale-Invariant Feature Transform)特征进行描述,该方法在MIT行人库上的检测结果优于文献[42]所提出的方法。文献[43]提出了一种基于部件的多线索混合专家框架,可处理部分遮挡情况下的行人分类。Vinay D.Shet等[44]提出了一种基于双网格逻辑推理的行人检测方法,将人体分为头、上身和腿部三个部分,在USC数据库[45]上获得了92%左右的检测成功率,对存在不同程度遮挡的行人检测率也达到了90%以上。该类方法的优点是:1)降低了人体某一部分被遮挡时对行人检测结果的影响;2)对人体各部分分而治之的思想,降低了整体检测的难度,而且各个部分之间的几何约束关系也对最终检测的精度有很大的帮助。
2.3 基于立体视觉的方法
该类方法是指通过2个或2个以上的摄像机进行图像采集,然后分析图像中目标的三维信息以识别出行人[46-48]。文献[21]利用三维信息估计路面参数用来筛选出感兴趣区域(ROI),并利于这些信息对所获得区域进行分类,构建了一个检测率较高的行人检测系统。文献[49]提出对左右视角的多个图像进行ROI提取,并将其用于模式分类,降低了目标检测的误报率。文献[50]利用车载立体摄像机,将图像亮度信息和三维密集立体信息相结合,构建了一个直立行人检测系统。该类方法的优点是充分利用场景中目标图像的深度信息进行行人区域的分割,速度较快。
3 行人数据库
到目前为止,行人检测研究除提出了大量的行人检测方法外,另一个成果是收集了多个行人数据库以供不同方法进行测试和比较。表1列出了目前常用的行人数据库,下面对每个数据库的特点做简要说明。
1)MIT行人数据库[15]是较早公开的行人数据库,该库包含正面和背面两个视角的彩色行人图像,数据库未划分训练集和测试集,且不包含负样本。该库在2005年以前使用较多,因图像背景简单,目前较少被人使用。
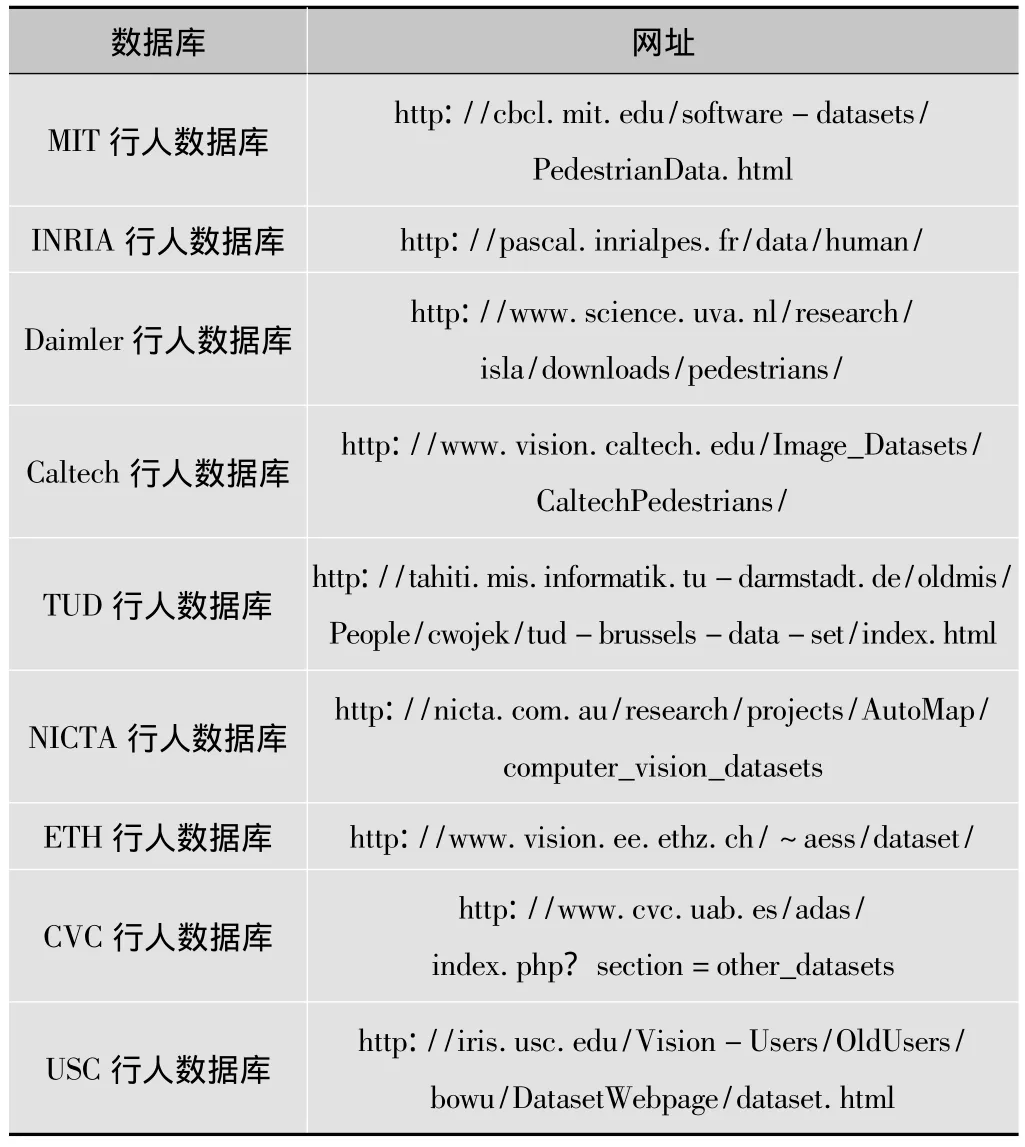
表1 行人数据库信息
2)INRIA行人数据库[22]是目前使用较多的静态行人数据库,包含训练集和测试集,且均包含正样本和负样本。该库行人所处背景复杂,人的姿态也较多,而且含有光照等环境因素的变化,更加符合实际场景。
3)Daimer行人数据库的图像来源于车载摄像机,分为检测数据集(Classification Benchmark)[10,43]和分类数据集(Detection Benchmark)[46],图片均是灰度图像。每个数据集均由训练集和测试集组成。测试集是一段大约27 min的视频,其中包含完整的以及被部分遮挡的行人。数据库中还包含3个辅助的非行人图像的数据集,即这3个附加库只包含负样本。该库中大量的正样本由较少的正样本经过移位和镜像生成,所以训练分类器时重要特征会出现在相邻的多个位置上,从而产生模糊效应,分类效果不佳。
4)Caltech行人数据库[4]是目前规模较大的行人数据库,库中的图像来源于车载摄像机,与现实生活中图像的实际遮挡频率一致,其中包含质量不太好的图像。数据集分为训练集和测试集,但测试集的标注信息尚未公开。该数据库为评估已有的行人检测器的性能提供了一个较好的平台。
5)TUD行人数据库[19]提供图像对以便计算光流信息,该数据库主要用于评估运动信息在行人检测中的作用,常用于行人检测及跟踪研究中。
6)NICTA行人数据库[51]是目前规模较大的静态图像行人数据库,包含25 551张单人的图像和5 207张高分辨率非行人图像,但不包含运动信息,已经划分好训练集和测试集。
7)ETH行人数据库[44]是基于双目视觉的行人数据库,采用一对车载摄像头拍摄获得,给出了标定信息和行人标注信息,同时采用置信度传播方法获取深度信息。该数据库主要用于多个行人的检测与跟踪研究。
8)CVC行人数据库目前包含3个数据集:CVC-01[52],CVC-02[53]和 CVC-Virtual[54]。其中,CVC-02 包含3个子数据集,分别针对行人检测的3个不同任务:感兴趣区域的产生、分类和系统性能评估。CVC-Virtual是通过Half-Life 2图像引擎产生的虚拟行人数据集以用于测试。该数据库主要用于车辆辅助驾驶中的行人检测研究。
9)USC行人数据库[45]的图像大部分来源于监控视频,是一个比较小的行人数据库,包含3组数据集:USCA,USC-B和USC-C。其中,USC-A 中包含正面或者背面拍摄的行人,行人之间无相互遮挡;USC-B中包含多个视角下且存在相互遮挡的行人;USC-C包含多视角下无相互遮挡的行人。该数据库主要用于存在遮挡和多视角情况下的行人检测研究。
4 现存问题及研究展望
行人检测技术的研究尽管已经取得了一些成果,但仍存在一些难题亟需解决,主要问题和未来的研究方向如下:
1)行人高度问题。根据几何知识可知,图像中行人的高度与摄像机到行人之间的距离成反比,即两者之间距离越远则图像中行人高度越小[55]。研究表明[4]:当图像中行人高度为30~80像素时,现有算法的行人检测取得最佳效果。目前大多数的研究均集中在行人高度为100像素以上的情况,对于远距离(即小高度)的行人仍无法检测。而在实际的车辆辅助驾驶系统应用中,需要解决的是远距离的行人检测问题,以便让驾驶员有足够的反应时间来采取措施避免事故。
2)复杂场景问题。包括场景中行人被车辆、景物或者其他行人遮挡的问题,光照变化造成的阴影问题,人体姿态变化问题以及人体穿着变化等问题,所有这些均对行人检测结果有很大影响。
3)分类器问题。目前,常用的分类器主要有SVM、AdaBoost和神经网络等。研究表明,使用单一分类器进行检测时误报率高,检测准确率低,速度较慢,多场景适应性差。采用串联组合分类器的方法仅解决上述检测速度慢的问题,而采用并联组合分类器的方法仅能解决检测率低和多场景适应性差的问题[9]。所以研究出一种能够全面协调解决上述问题的分类器组合方法,也是行人检测技术发展面临的一大难题。
4)多特征融合问题。尽管目前人们提出了许多有效的行人描述特征,但大量研究表明,任何基于某一单独特征的方法都很难获得最佳的行人检测效果,而将不同的特征相互结合起来使用检测结果最优[34-35]。但如何实现多特征的融合,使获得较高检测性能的同时,又兼顾计算复杂度和检测速度,也是未来研究的一个重要方向。
:
[1]GE Junfeng,LUO Yupin,TEI Gyomei.Real- time pedestrian detection and tracking at nighttime for driver - assistance systems[J].IEEE Trans.Intelligent Transportation Systems,2009,10(2):283-298.
[2]TOMIUC C,NEDEVSCHI S,MEINECKE M M.Pedestrian detection and classification based on 2D and 3D information for driving assistance systems[C]//Proc.IEEE International Conference on Intelligent Computer Communication and Processing.Cluj-Napoca,Romanian:IEEE Press,2007:133-139.
[3]贾慧星,章毓晋.车辆辅助驾驶系统中基于计算机视觉的行人检测研究综述[J].自动化学报,2007,33(1):84-90.
[4]DOLLAR P,WOJEK C,SCHIELE B,et al.Pedestrian detection:an evaluation of the state of the art[J].IEEE Trans.Pattern Analysis and Machine Intelligence,2011(9):1-20.
[5]GERONIMO D,LOPEZ A M,SAPPA A D,et al.Survey of pedestrian detection for advanced driver assistance systems[J].IEEE Trans.Pattern A-nalysis and Machine Intelligence,2010,32(7):1239-1258.
[6]BYUN K Y,KIM B S,KIM H K,et al.An effective pedestrian detection method for driver assistance system[C]//Proc.IEEE International Conference on Consumer Electronics.Las Vegas,USA:IEEE Press,2012:229-230.
[7]AGGARWAL J K,RYOO M S.Human activity analysis:a review[J].ACM Computing Surveys,2011,43(3):1-47.
[8]杜友田,陈峰,徐文立,等.基于视觉的人的运动识别综述[J].电子学报,2007,35(1):84-90.
[9]许言午,曹先彬,乔红.行人检测系统研究新进展及关键技术展望[J].电子学报,2008,36(5):368-376.
[10]KELLER C,ENZWEILER M,GAVRILA D M.A new benchmark for stereo-based pedestrian detection[C]//Proc.IEEE Intelligent Vehicles Symposium.Baden-Baden,Germany:IEEE Press,2011:691-696.
[11]GERMA T,LERASLE F,OUADAH N,et al.Vision and RFID data fusion for tracking people in crowds by a mobile robot[J].Computer Vision and Image Understanding,2010,114(6):641-651.
[12]PENTLAND A.Looking at people:sensing for ubiquitous and wearable computing[J].IEEE Trans.Pattern Analysis and Machine Intelligence,2000,22(1):107-119.
[13]ZHANG E,CHEN F.A fast and robust people counting method in video surveillance[C]//Proc.IEEE International Conference on Computa-tional Intelligence and Security.Harbin,China:IEEE Press,2007:339-343.
[14]万卫兵,霍宏,赵宇明.智能视频监控中目标的检测与识别[M].上海:上海交通大学出版社,2010.
[15]PAPAGEORGIOU C,POGGIO T.A trainable system for object detection[J].International Journal of Computer Vision,2000,38(1):15-33.
[16]VIOLA P,JONES M J.Robust real-time face detection[J].International Journal of Computer Vision,2004,57(2):137-154.
[17]VIOLA P,JONES M J,SNOW D.Detecting pedestrians using patterns of motion and appearance[J].International Journal of Computer Vision,2005,63(2):153-161.
[18]VIOLA P,JONES M J,SNOW D,Detecting pedestrians using patterns of motion and appearance[C]//Proc.9th IEEE International Conference on Computer Vision.Nice,France:IEEE Press,2003:734-741.
[19]WOJEK C,WALK S,SCHIELE B.Multi-cue onboard pedestrian detection[J].Computer Vision and Pattern Recognition.Miami,FL:[s.n.],2009:794-801.
[20]GERONIMO D,LOPEZ A,PONSA D,et al.Haar wavelets and edge orientation histograms for on-board pedestrian detection[J].Pattern Recognition and Image Analysis Lecture Notes in Computer Science,2007,44(7):418-425.
[21]XING W,ZHAO Y,CHENG R,et al.Fast pedestrian detection based on Haar pre-detection[J].International Journal of Computer and Communication Engineering,2012(3):207-209.
[22]DALAL N,TRIGGS B.Histograms of oriented gradients for human detection[J].Computer Vision and Pattern Recognition,2005(1):886-893.
[23]ZHU Q,AVIDAN S,YEH M C,et al.Fast Human detection using a cascade of histograms of oriented gradients[J].Computer Vision and Pattern Recognition,2006(2):1491-1498.
[24]QU J,LIU Z.Non-background HOG for pedestrian video detection[C]//Proc.8th IEEE International Conference on Natural Computation.Chongqing,China:IEEE Press,2012:535-539.
[25]WANG X,HAN T X,YAN S.An HOG-LBP human detector with partial occlusion handling[C]//Proc.2009 IEEE 12th International Conference on Computer Vision.Kyoto,Japan:IEEE Press,2009:32-39.
[26]WU B,NEVATIA R.Detection of multiple,partially occluded humans in a single image by bayesian combination of edgelet part detectors[C]//Proc.10th IEEE International Conference on Computer Vision.Beijing,China:IEEE Press,2005:90-97.
[27]WU B,NEVATIA R.Simultaneous object detection and segmentation by boosting local shape feature based classifier[C]//Proc.IEEE Conference on Computer Vision and Pattern Recognition,2007.Minneapolis,MN,USA:IEEE Press,2007:1-8.
[28]SABZMEYDANI P,MORI G.Detecting pedestrians by learning shapelet features[C]//Proc.IEEE Conference on Computer Vision and Pattern Recognition,2007.Minneapolis,MN,USA:IEEE Press,2007:9-16.
[29]YAO Wentao,DENG Zhidong.A robust pedestrian detection approach based on shapelet feature and Haar detector ensembles[J].Tsinghua Science and Technology,2012,17(1):40-50.
[30]GAVRILA D M.A Bayesian exemplar-based approach to hierarchical shape matching[J].Pattern Analysis and Machine Intelligence,2007,29(8):1408-1421.
[31]FARHADI M,MOTAMEDI S A,SHARIFIAN S.Efficient human detection based on parallel implementation of gradient and texture feature extraction methods[EB/OL].[2013-05-10].http://ieeexplore.ieee.org/xpl/articleDetails.jsp?tp= &arnumber=6121596&queryText%3DEfficient+human+detection+based+on+parallel+implementation+of+gradient+and+texture+feature+extraction+methods.
[32]ESS A,LEIBE B,GOOL L.Depth and appearance for mobile scene analysis[C]//Proc.IEEE 11th International Conference on Computer Vision.Rio de Janeiro,Brazil:IEEE Press,2007:1-8.
[33]GAVRILA D,MUNDER S.Multi-cue pedestrian detection and tracking from a moving vehicle[J].International Journal of Computer Vision,2007,73(1):41-59.
[34]WALK S,SCHINDLER K,SCHIELE B.Disparity statistics for pedestrian detection:Combining appearance,motion and stereo[C]//Proc.11th European Conference on Computer Vision.Heraklion,Crete,Greece:IEEE Press,2010:182-195.
[35]DALAL N,TRIGGS B,SCHMID C.Human detection using oriented histograms of flow and appearance[C]//Proc.9th European Conference on Computer Vision.Graz,Austria:IEEE Press,2006:428-441.
[36]WANG Y,TRAN D,LIAO Z.Learning hierarchical poselets for human parsing[EB/OL].[2013-05-10].http://ieeexplore.ieee.org/xpl/articleDetails.jsp?tp= &arnumber=5995519&queryText%3DLearning+hierarchical+poselets+for+human+parsing.
[37]BOURDEV L,MAJI S,BROX T,et al.Detecting people using mutually consistent poselet activations[C]//Proc.11th European Conference on Computer Vision.Heraklion,Crete,Greece:IEEE Press,2010:168-181.
[38]BOURDEV L,MALIK J.Poselets:Body part detectors training using 3D human pose annotations[C]//Proc.IEEE 12th International Conference onComputerVision.Kyoto,Japan:IEEE Press,2009:1365-1372.
[39]FELZENSZWALB P F,GIRSHICK R B,MCALLESTER D,et al.Object detection with discriminatively trained part based models[J].IEEE Trans.Pattern Analysis and Machine Intelligence,2009,32(9):1627-1645.
[40]MOHAN A,PAPAGEORGIOU C,POGGIO T.Example-based object detection in images by components[J].IEEE Trans.Pattern Analysis and Machine Intelligence,2001,23(4):349-361.
[41]MIKOLAJCZYK K,SCHMID C,ZISSERMAN A.Human detection based on a probabilistic assembly of robust part detectors[C]//Proc.8th European Conference on Computer Vision.Prague,Czech Republic:IEEE Press,2004:69-82.
[42]LAMPERT C H,BLASCHKO M B,HOFMANN T.Beyond sliding windows:object localization by efficient subwindow search[EB/OL].[2013-05-10].http://ieeexplore.ieee.org/xpls/abs_all.jsp?arnumber=4587586.
[43]ENZWEILER M,EIGENSTETTER A,SCHIELE B,et al.Multi-cue pedestrian classification with partial occlusion handling[EB/OL].[2013-05-10].http://ieeexplore.ieee.org/xpl/articleDetails.jsp?tp=&arnumber=5540111&queryText%3DMulti-cue+pedestrian+classification+with+partial+occlusion+handling.
[44]SHET V D,NEUMANN J,RAMESH V,et al.Bilattice-based logical reasoning for human detection[C]//Proc.IEEE Conference on Computer Vision and Pattern Recognition,2007.Minneapolis,MN,USA:IEEE Press,2007:20-25.
[45]WU B,NEVATIA R.Cluster boosted tree classifier for multi-view,multi-pose object detection[C]//Proc.IEEE 11th International Conference on Computer Vision.Rio de Janeiro,Brazil:IEEE Press,2007:1-8.
[46]ENZWEILER M,GAVRILA D M.Monocular pedestrian detection:survey and experiments[J].IEEE Trans.Pattern Analysis and Machine Intelligence,2009,31(12):2179-2195.
[47]GAVRILA D M,MUNDER S.Multi-cue pedestrian detection and tracking from a moving vehicle[J].International Journal of Computer Vision,2007,73(1):41-59.
[48]杨阳,杨静宁.联合特征在行人检测中的应用[J].中国图象图形学报,2012,17(5):671-675.
[49]HATTORI H,SEKI A,NISHIYAMA M,et al.Stereo-based pedestrian detection using multiple patterns[C]//Proc.British Machine Vision Conference.London,UK:IEEE Press,2009:1-10.
[50]NEDEVSCHI S,BOTA S,TOMIUC C.Stereo-based pedestrian detection for collision-avoidance applications[J].Transactions on Intelligent Transportation Systems,2009,10(3):380-391.
[51]OVERETT G,PETERSSON L,BREWER L,et al.A new pedestrian dataset for supervised learning[C]//Proc.2008 IEEE Intelligent Vehicles Symposium.Eindhoven,Holland:IEEE Press,2008:373-378.
[52]GERONIMO D,SAPPA A D,LOPEZ A M,et al.Adaptive image sampling and windows classification for on-board pedestrian detection[C]//Proc.The 5th International Conference on Computer Vision Systems.Bielefeld,Germany:IEEE Press,2007.
[53]GERONIMO D,SAPPA A D,PONSA D,et al.2D-3D based on-board pedestrian detection system[J].Computer Vision and Image Understanding(Special Issue on Intelligent Vision Systems),2010,114(5):583-595.
[54]MARIN J,VAZQUEZ D,GERONIMO D,et al.Learning appearance in virtual scenarios for pedestrian detection[EB/OL].[2013-05-10].http://ieeexplore.ieee.org/xpls/abs_all.jsp?arnumber=5540218.
[55]付洋,宋焕生,陈艳,等.一种基于视频的道路行人检测方法[J].电视技术,2012,36(13):140-144.
