基于FPGA的红外视频图像目标恒虚警检测实现
2014-09-18温庆福唐普英赵学功
温庆福,唐普英,赵学功
(电子科技大学光电信息学院,四川成都 610054)
恒虚警检测(Constant False Alarm Rate,CFAR)是雷达信号处理的一种经典方法。世界各国的专家学者,一直在这方面进行不断的研究和探索,取得了很好的检测效果。恒虚警的精髓就是经典的固定门限检测。即设定相应的检测阈值,该阈值可以有效地避免杂波、接收器热噪声、背景噪声和干扰变换的影响,从而有效地将感兴趣的目标区分出来。目前常见的恒虚警检测器可分为4类:均值类CFAR检测器、有序统计类CFAR检测器、采用自动筛选技术的GOS类CFAR检测器、自适应CFAR检测器[1]。无论是一维还是二维CFAR处理问题,都有大量学者进行了详细的研究,并取得很好的实际效果。
现场可编程门阵列(FPGA),具有结构灵活、实时性强、功能完善的特点,能为设计者提供最大的设计灵活性;所需外围器件少,适合模块化设计,开发周期短,可擦除复用的一系列优点[2]。本文采用恒虚警这一经典的方法,结合现场可编程门阵列(FPGA)技术,对红外电视图像进行处理研究。充分利用恒虚警这一经典有效的检测方法和现场可编程门阵列在理论和操作上的优点,进行红外视频目标的检测。从而实现高速、实时性与有效实现目标检测的统一。系统采用自行设计的专用电路,区别于计算机系统,实现小型专一化。采用外置可调谐式阈值设置,可极大地减小环境变化对检测的影响,增强对不同环境中目标检测的效果。
1 红外自适应恒虚警检测
1.1 红外目标特性
一般情况下,目标后的背景热辐射对应光谱辐射空间分布的辐射值的变化是连续的。而对应所要的红外目标人或者飞机等高于环境温度的目标,将被感知为一个灰度值高于此时周围背景的值。所获取的红外视频图像可以近似为以下模型[3],即

式中:f(x,y)表示所获得的红外图像;T(x,y)表示目标图像;B(x,y)表示背景图像;N(x,y)表示获取图像时引入的噪声图像,本文中视其为高斯白噪声[4]。由概率统计密度函数可描述为

式中:δ为噪声电压;u为标准偏差。在设定一定的门限阈值时,可以计算出相应的虚警概率为

1.2 自适应恒虚警检测
红外图像反映的是场景温度特性有关的热辐射,它的清晰度不高、对比度差,尤其是野外背景。人、车、船等特定目标温度高于环境,它们的红外图像的灰度就可能略高于背景,尽管是忽隐忽现,呈随机特性的高斯分布。采用恒虚警检测就是针对这种背景几乎被噪声淹没、被白化的弱信号情况下,具有一定的鲁棒性的恒定检测发现目标的概率。单帧局部自适应恒虚警检测算法步骤是,首先自适应求取估计检测阈值Th,然后将待检测点YM(假设目标像素集合)与自适应阈值Th比较,按式(4)判断是否是真正目标点F(p)。

所谓局部相对于单帧图像来说是一个n×n窗口,这个窗口中的像素构成一个集合(在小范围内,对于背景视同一个准平稳的随机分布)用来估算检测阈值Th,窗口正中的2×2像素(可能是一个冲激响应)构成一个子集用来测算YM值。这个窗口无缝有序地滑动,实现对整帧画面中所有可能的点目标的检测。在检测过程中的关键核心问题是自适应门限Th的估计。
对于n×n窗口局域,它的阈值估计公式为

式中:a,b,c为经验常数,在不同的实验背景中,它的取值不尽相同,因此在不同环境的试验中,调整为相适应的值;μ为背景温度(热辐射)均值;σ为背景温度(热辐射)标准差,表达式为

式中:f(x,y)是红外摄像机采集的原始图像信号(2×2代表垂直和水平坐标),按电视扫描格式采集顺序实时输入。
例如取n=8,即8×8的卷积模板为例,如图1所示。模板中t是目标可能位置,模板正中2×2共4个像素点就是拟定被检测小目标的YM子集,求YM值最简单的方法是取该4个点的均值,最好的方法是用数学形态学对YM子集进行腐蚀和膨胀算法以及开运算和闭运算之后再取加权均值,以去伪存真。在YM周围留有一圈“隔离带”,图1卷积模板中的g,它可能是背景,也可能是目标对象,它在两者之间起缓冲作用。本案制定的这个特殊模板非常有助于提高可靠性,减少虚警概率。模板中其余的部分x表示运算区域。因为有“隔离带”后,上述的相应求期望和方差的公式也需做相应的修正,只累加运算最外两圈的像素。
为了剔除虚假背景信息,在按式(6)和式(7)对图1进行运算时,当像素点的值f(x,y)≥Th时,不参与运算。Th是先前历史(例如相邻的上方和左方模板)卷积运算Th值记录的均值。理论证明,这一补充算法,对提高鲁棒性非常重要。

图1 卷积模板
2 电路实现
实现该电路的硬件结构图如图2所示。

图2 硬件结构
要实现该电路,最重要的是让该模板在FPGA中实现类似滑窗的电路。因此采集的红外视频信号首先将其转化为ITU-R BT.656信号[5],由于该信号的灰度值Y和色差信号C没有分离,不方便处理,将其转为ITU-R BT.601[6],在此模式下同时运用分离出的行场信号进行处理。调用 Xilinx中现成的IPcore依次延时1,2,…,n-1行;再加当前数据行,及实现n行数据对齐。运用Verilog中reg[7:0],mem[n-1:0]实现同时操作一行中n个数据。这样即可形成N×N的模板运算。仿真结果如图3所示,其中mem0是当前输入数据,mem1,…,mem7是依次延时1行到7个行时钟且对齐后的数据。

图3 电路仿真时序(截图)
对于自动阈值的设定,关键需要计算出均值和标准差。均值的求取可以在FPGA中用除法电路实现,在设计中也可以运用移位电路相加的模式;对方差的求取,可采取查找表的方法实现。同时注意运算的时序对齐问题。在运算中将相应的像素灰度值YM与阈值比较,并进行二值化处理。就可得到只显示检测目标的二值化图像。仿真时序结果如图3所示,检测到目标则fp_detect为1,如图3最下方一行,3处目标被检测到并二值化为1。
阈值的公式设计为外置可调式,可适用于不同背景的目标检测。通过外置设备调整a,b,c的值,从而改变Th的大小。
3 实验结果与分析
运用上述电路算法对采集的红外图像检测结果如图4、图5和图6所示。其中图4a、图5a分别为两个同背景下的红外原始视频图像。图4b与图5b都为效果较好二值图像,图4c与5c都为效果较差二值图像,它们分别是场景一与场景二处理后的图像,都是通过调整阈值,采用自适应恒虚警检测后的得到二值化图像。

图4 场景一实验效果图
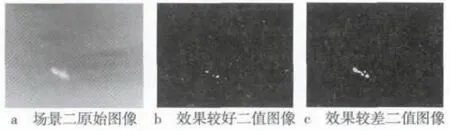
图5 场景二实验效果图

图6 不同场景载入背景显示图
图4b、图4c阈值选取时,阈值式(5)中a,b,c分别为1,0.25,2;1,0.125,1;1,0.5,3;1,0.25,1。对不同背景图像,图4a和图5a的信噪比不一样,检测时阈值的设定也不一样。在同一背景下,图4c的阈值小于图4b的阈值,虚检点较多。同样地,图5c的阈值设置过小,造成过多的虚检。图4b和图5b的阈值设计比较合理,既能有效检出目标,同时虚检点最少。阈值设置也不是越大越好,越大会造成目标的漏检。
通常为了能准确确定目标的方位,可以采用装入预先采集的背景图显示,如图6所示,这样的显示,尤其是在地面目标方位的判断中具有很好的效果,在空域中可以判断大致的方位,极大地增强人的识别效果。
当然CFAR也存在一定的漏检测或误检,在检测时调整式(5)中的a,b,c值,使人眼能有效地二次判断出目标,另外可以采用自己提出的一种新型的轨迹记录的方法[7]。在上述的图4b和图5b,检测效果比较好,结合该显示方法,经过人眼的二次判读,能更加准确识别出目标,减小误判。
4 小结
本文结合雷达中经典的恒虚警自适应检测法和FPGA,充分运用两者各自的优势,对红外视频目标进行检测。通过不断的多场景实验,调制自适应的阈值。可以对不同场景的目标进行有效的检测。
:
[1]何友,关键,孟祥伟,等.雷达目标检测与恒虚警处理[M].2版.北京:清华大学出版社,2011:1-10.
[2]邱军海,关键,宋杰,等.常用雷达视频信号处理算法在FPGA上的实现[J].海军航空工程学院学报,2006,21(6):637-641.
[3]赵晶晶,谌海新,刘星彤,等.红外小目标图像预处理方法研究[J].信号处理,2009,25(7):1088-1091.
[4]欧阳俊华,黄庚华,程鹏飞,等.FPGA的激光雷达恒虚警控制技术研究[J].红外与毫米学报,2009,28(1):50-53.
[5]向厚振,张志杰,王鹏.基于FPGA视频和图像处理系统的FIFO缓存技术[J].电视技术,2012,36(9):41-43.
[6]GB/T 17953—2000,4∶2∶2 数字分量图像信号的接口[S].北京:中国标准出版社,2000.
[7]温庆福,郭向东.一种新型的活动目标轨迹记录算法[J].电视技术,2014,38(5):31-33.
