基于自适应加权和D-S证据理论的风电机组故障诊断
2014-09-17神显豪张祁
神显豪,张祁,2
(1.桂林理工大学信息科学与工程学院,广西桂林541004;2.熊本大学自然科学研究科情報電気電子工学専攻,日本熊本860-8555)
风力发电作为一种可再生的绿色能源发电方式,已经受到越来越高的重视。但风电机组是一个相当复杂的机电系统,其工作外部环境条件十分恶劣,机组设备的性能受影响比较大,容易因故障停机。因此,实时监测机组运行状况,确保其正常运行是一项很重要的工作。
风电机组一般由风轮系统、齿轮箱系统、发电机、偏航系统、液压系统和刹车机构、控制与安全系统等子系统组成。任一子系统的故障都可能使机组性能下降甚至被迫停机,一种故障现象可能由多个不同层次的故障引起,不同的故障可能呈现同样的现象[1]。文献 [2]运用贝叶斯网络和 D-S证据理论,提出了一种较为准确和合理的分布式故障诊断模型,但是贝叶斯理论的推理过程要求给出先验概率和条件概率,并且要求各概率之间相互独立,这些条件在实际工程中很难满足。文献 [3]运用模糊理论方法,建立故障诊断修正数学模型,解决信息或决策冲突问题,但其算法原理不够直观,运算较为复杂。文献[4-6]采用神经网络和D-S证据结合进行故障诊断,神经网络的单通道输出作为各故障状态焦点元素的基本概率分配,从而避免了证据理论构造基本概率分配函数的困难性,但是神经网络过于复杂且分类速度较慢,学习过程中运算量过大。文献 [7]采用支持向量机 (Support Vector Machine)与自适应模糊神经推理 (Adaptive Neuro-fuzzy Inference System)的分类器集合到一个通用框架,提高了故障的分析和诊断,且优于单独的SVM和ANFIS的诊断,但当二次规划的矩阵样本数量较大时,将需要大量内存和计算时间。
根据以上问题,采用数据融合中的自适应加权算法无需测量数据的先验知识,融合出比任一单传感器方差更小的数据融合值,有效减少网络数据冗余和数据量,提高处理速度。运用高斯隶属度函数获得一种较为直观的概率赋值函数方法,解决了证据理论的基本概率赋值难的问题。而证据理论算法需要的先验条件较少,可以用概率区间的方法表示不确定信息,实现不确定信息的客观和数量化的表示,具有很强的实用性。
1 多传感器信息融合基本思想
多传感器信息融合是将多种类型的传感器提供的多种形式和不同时刻的信息加以综合处理,提炼有价值的信息,剔除冗余数据,在复杂多变的环境中提高决策能力,结果比单一信息源更能全面一致地评估被监测对象。文中基于WSN,对采集的海量数据先在终端节点处进行一级信息融合,将融合结果送至路由设备,再由路由设备进行二级信息融合,将监测和诊断的结果送至协调器后上传至主机。这种融合思想可有效减少终端节点至路由设备、路由设备至协调器的数据传输量,有利于节约网络能量,两级信息融合的风电机组监测与诊断的系统总体设计如图1所示。
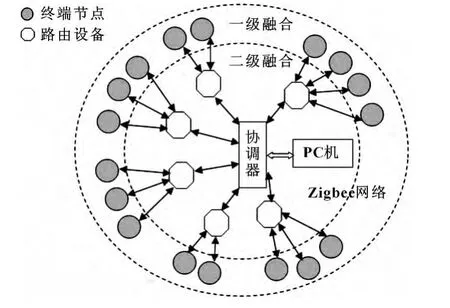
图1 风电机组故障监测与诊断系统
由于单个传感器容易受到电磁波,辐射等外界干扰的影响,使采集的数据有所偏差,所以在信号层采用自适应加权融合算法对多个传感器的同类型参数进行融合。在诊断系统中,故障和症状之间不一定是线性对应关系,每种症状下的各种故障都有可能发生,故在特征层采用D-S证据理论算法,综合不同类型参数的证据,并以上层的自适应加权融合的结果作为数据源,提高故障诊断的准确性。两级信息融合模型如图2所示。
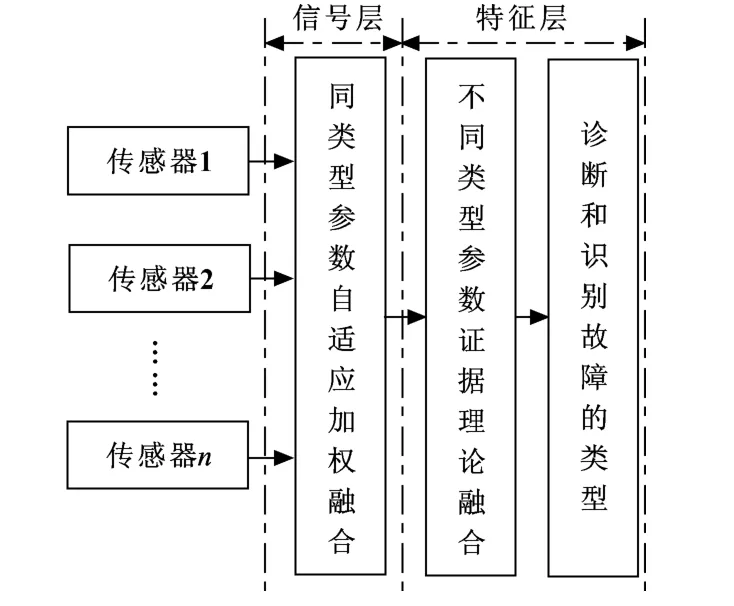
图2 风电机组故障诊断的信息融合模型
2 信号层信息融合
自适应加权融合算法[8]是根据各个传感器测量值的方差值调整对应的权系数,使得融合后的总方差最小,此时各个传感器的权系数最优。首先需求各个传感器的方差,再计算各个传感器对应的加权因子Wi,从而获得最优融合值。设两个互相独立的传感器i,j,测量值分别为Xi,Xj,对应的测量误差为零均值平稳噪声ei,ej,待估计真值为X,则:Xi=X+ei,Xj=X+ej。

若路由器的一个计算周期内,传感器的测量次数为v,则:
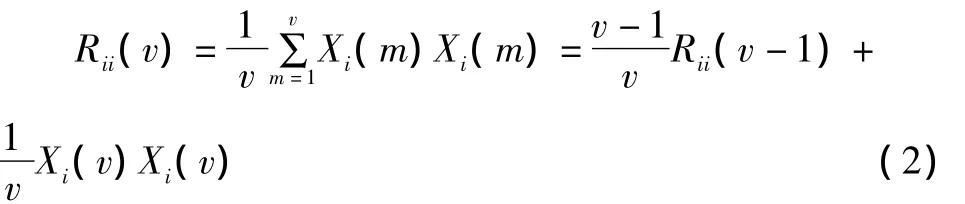

由于通常真值X是根据各传感器历史数据均值X进行估计,则第i个传感器的测量均值为。
根据多元函数求极值理论,可求得总方差最小时第i个传感器所对应的最优加权因子:

总方差为:

其中,m为传感器采集数据历史的次数,融合后的估计值:

3 特征层信息融合
D-S证据理论融合的关键是基本概率赋值函数,其值直接影响诊断的准确性,基本概率分配函数的获取方法繁多,针对不同的研究对象有差异巨大的获取方法,对于大型发电机组的故障诊断,选取哪种合适的方法获得相对准确的基本概率分配函数是研究的一个难点和重点,文中运用高斯隶属度函数获得一种较为直观的概率赋值函数方法,避免了证据理论构造基本概率分配函数的困难:
(1)利用实验方法模拟风力发电机齿轮箱的典型故障运行模式,假设传感器节点每p个数据作为一组,至少测量q(q>5)组,并求各组数据的平均值Xi和方差,作为传感器i所测物理量的标准。
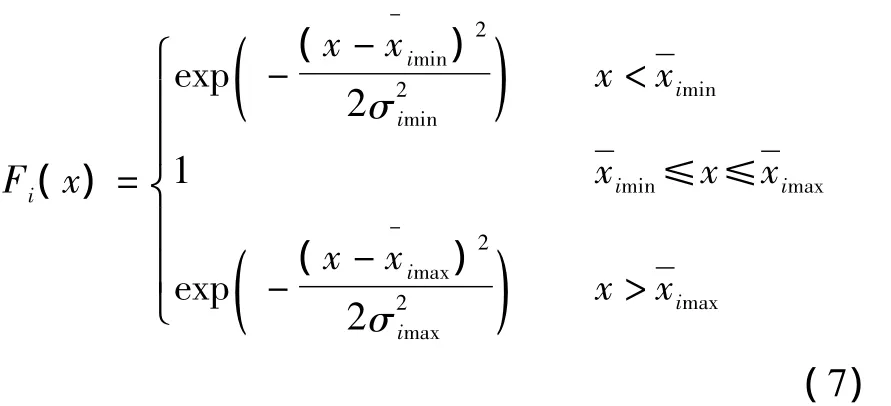
(2)对几组平均值和方差比较,找到传感器i所测物理量的最大平均值和最小平均值,对应的方差分别为,,分别建立典型故障模式几种物理量的高斯隶属度函数:
(3)对待检测机组的齿轮箱采集信息,利用步骤1的方法计算平均值,记为,不同物理量代入对应的高斯隶属度函数,所得,表示第t个传感器的测量值隶属于第i个故障的程度。将每个传感器的测量值分别代入各个故障标准,得到各个故障的支持度。
为每个传感器分配可靠性系数设为α,第i个证据对不确定的故障种类θ的改进概率分配函数为mi(θ),则:

根据D-S证据理论[9-11]的算法,当出现严重证据冲突时,会使融合结果出现一票否决的现象,所以当冲突严重时,应修改证据组合的方法,减小冲突较大的证据对最后融合结果的影响。因此,需先得到各个证据焦点元素的平均值。

然后,计算各个证据的焦点元素到平均值的距离和函数。

依次两两融合证据,计算证据的冲突系数K,设冲突系数K的门限值为0.9,如果两条证据冲突严重即冲突系数大于门限值,则证明此两条证据冲突严重,此时需要计算两条证据的距离和函数,用各个证据焦点的平均值替代距离和函数较大的那条证据,然后再重新计算K值,按如下规则组合证据:
4 仿真实验
通常,齿轮箱是整个机组的传动系动力匹配和扭转振动的薄弱环节,因此,仿真实验选取风电机组齿轮箱轴承为故障监测对象。设测量振动幅值属于第一类测量的物理量,温度属于第二类物理量,噪声属于第三类物理量。
首先,在齿轮箱低速轴处安置有3个振动传感器,每0.6 s采集一次数据,每隔4 min对所采集的数据进行信号层融合,取待估计真值X=3.5,用一组互不相关的零均值白噪声数据模拟各个传感器的观测数据,均值为0,方差分别为0.5、0.05和3.5。图3是振动信号的自适应加权值与算术平均值的对比,图4为融合后的总方差曲线。
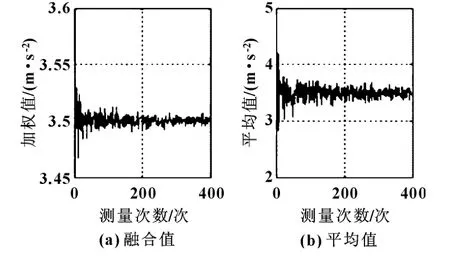
图3 自适应加权与平均值
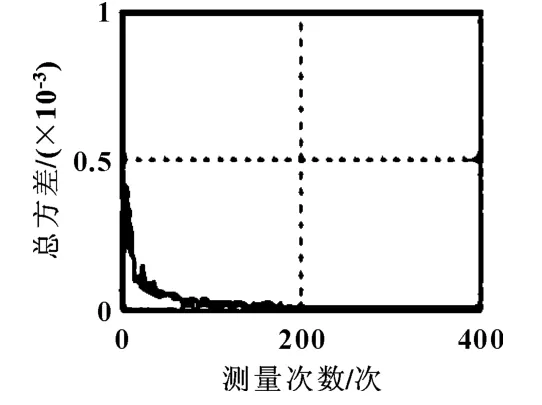
图4 总均方误差
由图3可见,自适应加权的估计值的波动范围小于算术平均估计值,由图4可知,随着测量次数的增加,自适应加权算法的总方差逐渐减小并无限趋近于零,达到总方差最小的目的。方差σ2i值越大,则数据离散度越大,对应的加权因子应该越小,反之亦然,由表1可知传感器的方差和权值满足上述对应关系,符合设计的要求。
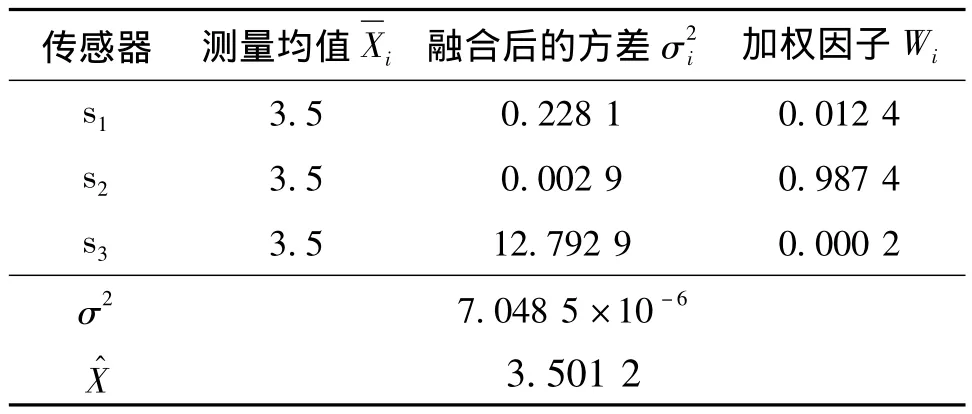
表1 振动传感器融合结果 m/s2
经融合后,总均方误差σ2小于任一传感器的方差,说明该融合方法有效地提高了数据精度。自适应加权算法结果与算术平均值3.452 5比较可知,前者的融合效果优于后者。齿轮箱其他旋转轴的振动、噪声和温度信号分别采用相同方法进行同类型信息融合。
第二层信息融合针对不同类型参数的证据融合,设齿轮箱的低速轴故障,太阳轮轴故障,中间轴故障,高速轴故障的4类轴承故障隶属于识别框架集U={u1,u2,u3,u4}。振动传感器 s1,s4,s7,s10分别采集机组齿轮箱的低速轴、太阳轮轴、中间轴和高速轴的振动幅值,温度传感器s2,s5,s8,s11分别采集温度数据,噪声传感器s3,s6,s9,s12分别采集噪声数据,传感器分布如图5所示。
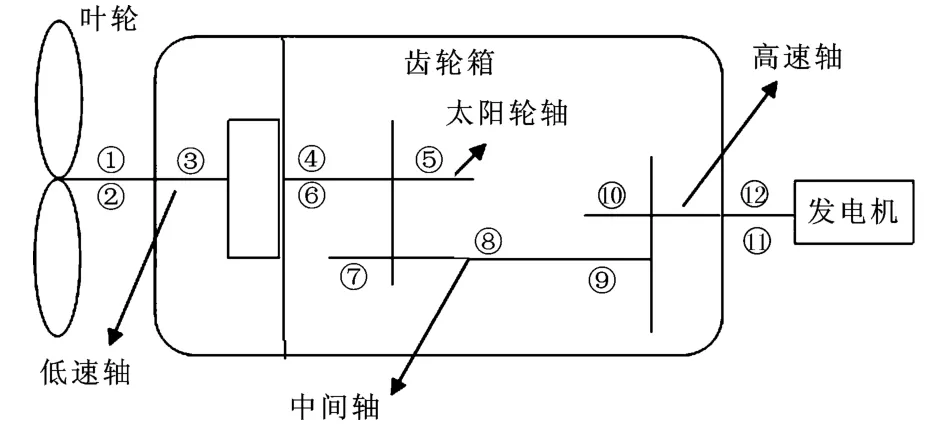
图5 风电齿轮箱的传感器监测分布
将传感器采集的数据代入高斯隶属度函数,计算得到证据组合所需的基本概率分配函数。设传感器s1,s4,s7,s10提供证据的可靠性系数α分别为0.9,0.85,0.75,0.8。利用实验模拟各典型故障的运行模式,其中振幅标准和运行机组齿轮箱的振动参数如表2所示。

表2 风电机组齿轮箱的幅值统计 m/s2
将振动传感器采集的数据代入典型故障模式的高斯隶属度函数,并作为参数标准,获得各振动传感器的BPA,如表3。
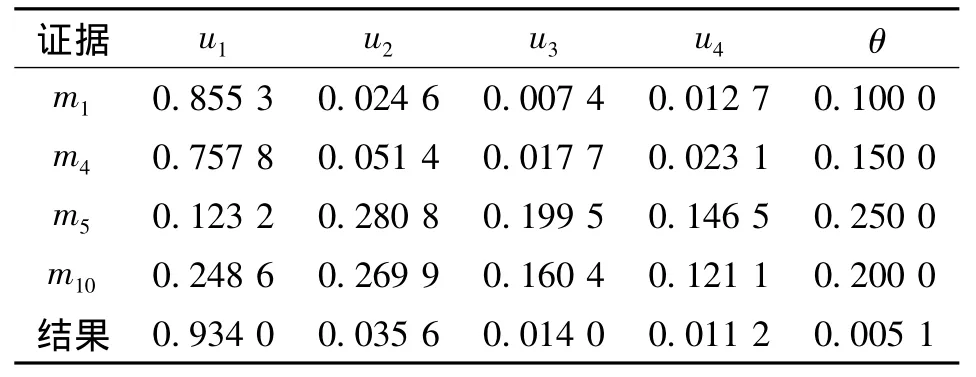
表3 振动传感器基本概率赋值函数BPA
同理计算,融合温度和噪声传感器的数据,得到证据结果如表4。
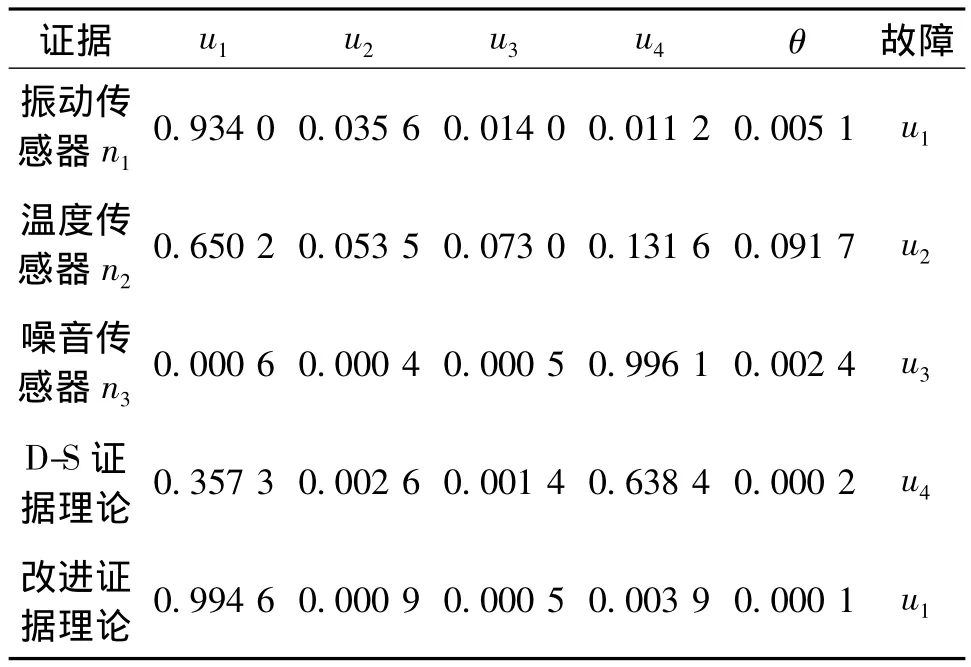
表4 基本概率赋值函数BPA
由表4可见,经过信息融合,诊断的精度大大提高了。当证据出现严重冲突时,原D-S证据理论算法给出了错误结果,而改进的算法仍能给出正确结果。不确定故障的概率从0.000 2减小到了0.000 1,效果比较显著。当证据出现严重矛盾的时候,如果通过单一证据诊断故障,则无法判断机组的故障究竟属于哪一类,有可能给出错误的诊断结果。经过两级信息融合处理提高了故障诊断结果的准确性和可靠性,节约了网络能量。
5 结束语
介绍了风力发电机齿轮箱故障监测和诊断的方法,仿真实验结果表明采用自适应加权融合算法融合同类型参数能有效去除网络冗余数据,节约网络耗能,准确表征机组的实际状态,为故障识别提供良好的数据源。而改进的D-S证据理论算法综合处理不同类型参数的证据,有效处理冲突,采用了一种较为直观可行的基本概率赋值函数方法,显著提高了诊断系统的故障辨识能力。
【1】杨伟,贾石峰.基于RBF神经网络的风力发电机组故障诊断研究[J].电气传动自动化,2009,31(2):18 -19.
【2】何小飞,童晓阳,孙明蔚.基于贝叶斯网络和D-S证据理论的分布式电网故障诊断[J].电力系统自动化,2011,35(10):109-111.
【3】徐晓滨,文成林,王迎昌.基于模糊故障特征信息的随机集度量信息融合诊断方法[J].电子与信息学报,2009,31(7):1635-1639.
【4】董海鹰,李娜.基于D-S证据理论信息融合的转辙机故障诊断方法研究[J].测试技术学报,2013,27(1):1 -6.
【5】XU Chunmei,ZHANG Hao,PENG Daogang,et al.Study of Fault Diagnosis of Integrate of D-S Evidence Theory Based on Neural Network for Turbine[J].Energy Procedia,2012,16(C):20207-2032.
【6】DU Hailian,LV Feng,LI Shue,et al.Study of Fault Diagnosis Method Based on Data Fusion Technology[J].Procedia Engineering,2012,29(C):2590 -2594.
【7】SALAHSHOOR Karim,KORDESTANI Mojtaba,KHOSHRO Majid S.Fault Detection and Diagnosis of an Industrial Steam Turbine Using Fusion of SVM(Support Vector Machine)and ANFIS(Adaptive Neuro-fuzzy Inference System)classifiers[J].Energy,2010,35:5472 -5482.
【8】李莉,高冰.自适应加权信息融合加权因子的动态调整[J].战术导弹技术,2011(3):109-111.
【9】李月,徐余法,陈国初,等.D-S证据理论在多传感器故障诊断中的改进及应用[J].东南大学学报,2011(9):102-105.
【10】杨靖,林益,洪露,等.一种改进的D-S证据理论合成方法[J].计算机工程与应用,2012,48(20):150 -153.
【11】李玲玲,马东娟,王成山,等.DS证据理论冲突处理新方法[J].计算机应用研究,2011,28(12):4528 -4530.
