面向成本的教学机器人设计
2014-09-14姜健JIANGJian
姜健JIANG Jian
(上海应用技术学院机械工程学院,上海201418)
0 引言
机器人是最典型的机电一体化产品之一。在工业、国防、空间探索、医疗等领域有着越来越多的应用,代表着一个国家科技发展的水平。机器人的结构设计、电路设计及控制程序编制已经成为机械、电气、电子、控制、计算机等专业大学生必备的能力。培养大学生这些方面能力依靠的实验设备目前主要是进口的大中型工业机器人产品。由于该类产品在价格、体积和维护方面存在的问题,购置和使用成本比较高,只能用于一些演示性实验,学生缺少动手实践的条件。本文研制的基于单片机控制的步进电机驱动的小型教学机器人体积小、制造成本低,可以在专业实验室大量配置,较好地解决了机器人实验教学的难题。
1 教学机器人的整体结构
如图1所示为基于单片机控制的教学机器人整体结构图。不包括手爪自由度该机器人共有四个自由度,分别为腰转自由度、下臂俯仰自由度、上臂俯仰自由度和手腕旋转自由度。为了提高驱动力矩和减少独立配置减速机构带来的成本负担,各自由度都采用自带减速器的步进电动机来实现。手爪采用微型步进电机驱动丝杠螺母机构的方式来实现。

图1 教学机器人的整体结构
2 面向成本的设计
2.1 面向成本的机构部分设计 机器人的结构件有三个来源:①采用光敏树脂三维打印快速成型工艺制造的复杂结构件;②采用激光切割加工制造的不锈钢板件或硬质铝合金板件;③采用铝合金型材及其专用联结件制造的底座和支撑件。
如图2所示是采用快速成型工艺加工的机器人下臂及对该机器人下臂进行的应力分析,分析结果表明该结构在中空结构设计下仍能承受额定负载。采用光敏树脂三维打印快速成型工艺制造的复杂结构件,工件材料密度为1.3g/cm3,拉伸强度为 63MPa[1],冲击强度为 58KJ/m2,邵氏硬度为92度,弹性模量为3000MPa。泊松比为0.3。因为它具有良好的机械性能、较低的密度和对复杂结构的工艺适应性,成为机器人复杂结构件制造工艺的优选。

图2 快速成型结构件及其应力分析
如图3所示为采用铝合金型材及专用联结件联结的机器人底座。这种方式无需复杂加工,联结可靠、拆装方便、价格低廉,已经广泛用于小载荷设备的机架结构。
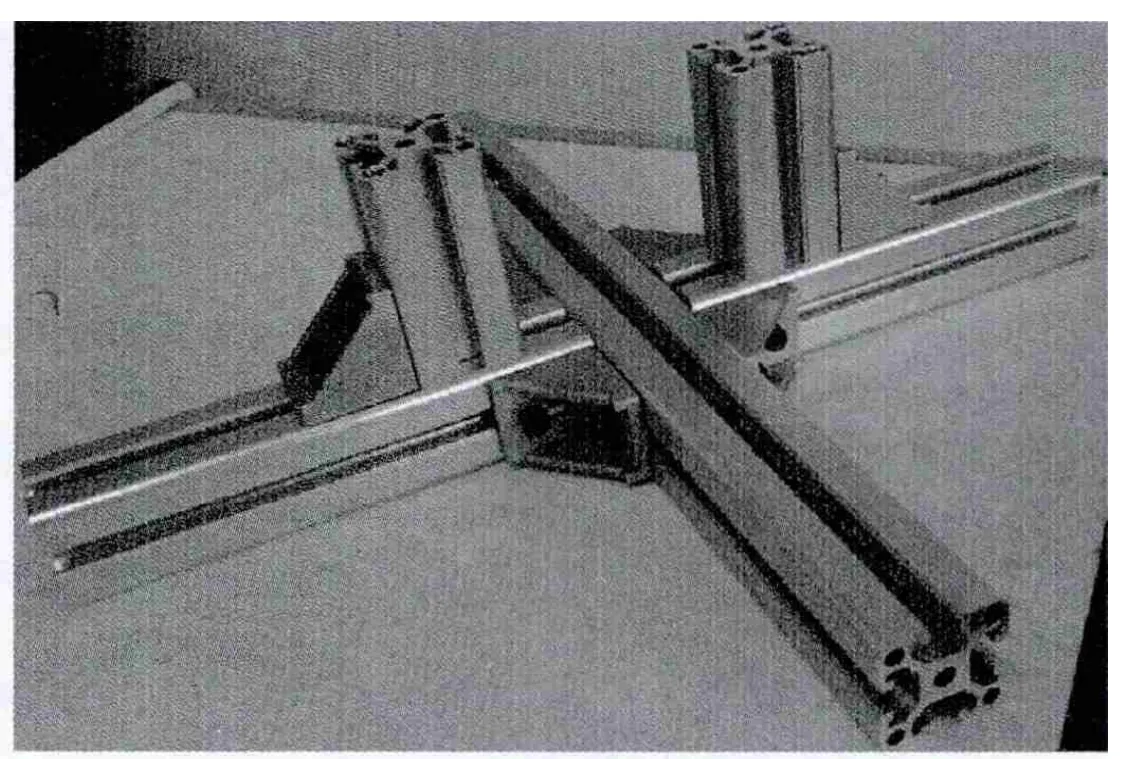
图3 铝合金型材机器人底座
2.2 面向成本的控制部分设计 因为目前高校的单片机教学还是以51系列单片机为主,所以本机器人的控制系统采用了STC89C52单片机。驱动电路采用了适应较大功率步进电机驱动的TB6560AHQ驱动芯片。该芯片可承受峰值40V的驱动电压、峰值3.5A的电流,为电机在大力矩、高转速下持续运行提供了技术保障。该芯片可驱动42系列、57系列和部分86系列两相步进电机。考虑到各机器人关节负载的区别,本文设计的机器人的下臂俯仰关节采用86系列的两相步进电机驱动,上臂俯仰和腰转关节采用57系列两相步进电机驱动,手腕旋转关节采用的是42系列步进电机驱动。如图4所示为驱动一个步进电动机的TB6560AHQ驱动芯片的主电路。
在图4中,M0和PROTECT引脚分别为工作状态和过电流保护指示引脚[2]。通过引脚NFA和NFB定义步进电机的两相最大驱动电流。STC89C52单片机的脉冲信号、方向控制信号和使能信号通过光耦隔离连接到芯片的CLK、CW/CCW和ENABLE三个引脚。

图4 TB6560AHQ驱动芯片的主电路
3 结束语
应用型高等院校机械电子类专业的培养有赖于实验教学的强化。为了解决机器人教学中外购机器人成本高,底层开放性不足,不能完全满足本科生动手实践要求的问题,陆续研制了基于舵机的关节型教学机器人[3]和本文所述面向成本的基于步进电机驱动的教学机器人。由于体积小、成本低,在实践教学过程中大量使用,获得了良好的教学效果。
[1]翟媛萍.光固化快速成型材料的研究与应用[D].南京:南京理工大学,2004:30-40.
[2]王党利,宁生科,马宝吉.基于TB6560的步进电机驱动电路设计[J].单片机与嵌入式系统,2010,01:41-43.
[3]姜健,荆学东,丁涛.舵机驱动机器人在机电专业实践教学中的应用 [A].2013高等院校教育与教学研讨会(CETCU)[C].Publishing House:Ding Mao Company.2013:204-206.
