基于AMESim的树木移栽机负载敏感系统仿真研究
2014-09-13李志鹏张剑琦
李志鹏,刘 洋,张剑琦
(东北林业大学 交通学院,哈尔滨 150040)
随着城市现代化的飞速发展,人们对其赖以生存环境的保护意识也随之增强,在暴露出来的生态环境矛盾面前,着力建设生态园林,大力加强城乡绿化,建设和谐友好的人居生态环境迫在眉睫、势在必行。
在城市绿化建设工程中,会涉及到成品树苗栽种、多年老树移栽、更新树木品种等作业,传统的移栽树木的技术是全人工操作,挖掘树根部周边的泥土,选择性切断树根,将留下的根部连带泥土一起包扎装运。如此的人工作业过程耗时耗力,人力劳动强度大,工作效率低,树木移栽周期长,这些都直接影响被移栽的树木成活率[1]。采用自动化、机械化和智能化作业可将功效提高几十倍,几百倍不止。因此,研制开发创新树木移栽机具有十分重要的现实意义,产品的应用与推广具有不可限量的空间。
本文对于树木移栽机整体结构的新型设计理念,以及机械控制技术,末端执行机构部分组件等方面不做过多研究,而是将重点放在液压动力系统部分的设计与分析,使得移栽过程人力、物力、资源都为最低消耗。文中还应用AMESim仿真系统对树木移栽机工作过程中阻力所引发的问题,进行了建模和仿真分析。
1 树木移栽机液压系统工作原理
1.1 树木移摘机的工作特点
树木移摘机挖掘带根树木是在各有关部件和装置协同动作下完成的。如图1所示已说明树木移摘机的工作过程。

图1 树木移栽机
1.2 树木移摘机的操作步骤
将树木移栽机行至要移栽树木旁,操作油缸使得铲刀组张开,让被移栽树木至于铲刀中央位置,并用锁环锁定树木位置[2]。挖树机构是由四个铲刀协同工作,这个过程中铲刀用来铲断树根,并使得所包围的根部形成圆锥形土球。最后再由油缸操作,把树木的根部从土中“连根拔起”。
1.3 树木移栽机的工作条件
待移植树木胸径为20 cm,则土球直径按最大规格计算为胸径的10倍为200 cm,则土球高度约为1 m。
1.4 树木移栽机的铲刀阻力
采用土壤——机械系统力学中常用的半经验法[2],以相似理论为基础模型试验建立并计算下铲阻力的公式为:
P=0.130 7X1.188 4ρs0.755 3C0.244 7(13.927 5+0.563 3×100.024 3β)。
(1)
式中:X为铲刀下铲位移量,m;ρs为土壤容重,g/cm3;容积重量指单位体积的土的重量,单位为kg/m3,分自然状态下的容重和松散状态下的容重;C为土壤内聚力,Pa;C=(-33m+4)×(3.75ρd-4 032);m为土体含水量与粘粒含量的比值m>1.33时,建议取C<5.0kPa,土体干密度ρd=1.5g/cm3;β为铲刀体围角的半角(度)。
根据上述计算公式可以看出,树木移栽机必须将阻力问题攻克,这样才能使移栽机在不同土壤环境,不同湿度环境,亦或树木根部土球大小不同的情况下都能有最佳工作效率,达到最好的挖掘效果。由于各个树木所处环境不同,挖掘时铲刀所受阻力大小也不同,应用负载敏感液压系统可以有效的解决压力变化问题,使得树木的移栽过程不会其受影响。
2 负载敏感系统
负载敏感压力补偿液压系统是一种新型的液压控制方式,它是具有压力反馈的闭环系统,在流量指示条件下实现泵对负载压力的随动控制。负载敏感系统的突出特点是可以根据负载的大小随时调节油泵的流量,也就是说此系统可以达到动力元件和执行结构的功率相适应的需求,从而满足按需供流,并且可以控制过程中的流量损失在很小的值域内,这也突出了负载敏感系统的节能省力的优点。由此,负载敏感压力补偿液压系统成为当今颇受重视的、目前已经广泛应用于包括液压挖掘机在内的各种工程机械和农业机械上的一种液压系统控制方式。
负载敏感技术是一种新型高效的技术,当负载所需的压力和流量与泵源的压力流量相适应时,系统可以最大限度提高工作效率以达到预期的最佳效果。在提高系统工作时的功率利用效率方面需注意以下两个方面,一是负载所需的压力要与泵源的输出压力相适应,二是泵源的输出流量恰好与负载驱动速度的需求相匹配,工作原理如图2所示。

图2 负载敏感系统工作原理
该回路的控制部分是由负载敏感变量泵1、负载变量缸敏感腔3、卸载调压的恒压阀4和反馈信号的Ls阀5组成。其中调节节流阀6来使得Ls阀5压力与设定值有一定的偏差,产生Ls阀的压力差等于弹簧的预紧力,其通过的流量根据伯努利方程为[3]
(2)

(3)
式中:Q为流过流量孔的流量,m3/s;K为常数;A为节流孔开口面积,m3;Δp为节流孔前后的压力差,Pa;a为流量系数;p为油液密度,kg/m3。
若Δp=const,则Q=f(A)[5],即通过的流量不受负载变化的影响,而只与节流口的开口面积A有关。
无工作状态下Ls阀5的受力平衡方程为:
(ps-pL)A=FS。
(4)
式中:A为Ls阀阀芯面积;FS为阀芯作用力。
当阀6关闭时,负载处于停止工作,系统处于准备进入工作状态。此时的泵出口压力Ps为阀5弹簧设定压力,一般在1.4MPa左右,此时泵的功率接近于“零流量卸荷”的理想状态,功率消耗几乎为零[4]。
当系统处于过载或者保压状态时,系统无需或无法推动执行元件动作。此时,阀5由于弹簧压力一直处于右位,泵的Ps处压力逐渐上升,直到大于恒压阀设定压力,推动恒压阀左位,油液通过阀4进入变量缸3,使泵的流量减小到维持系统本身控制和泄漏的消耗供应,达到“零流量”的状态,斜盘角近零偏角,泵的功耗最小[6]。
当阀6的开度变大或者变小时,系统处于自适应状态。当开度变大时,系统的负载增大,此时压差Δp=pS-pL减小,使得阀5处于右位,变量缸3的油液经过阀5流回油箱,因此泵斜盘产生扭矩差,推动斜盘角增大,使得泵的流量增大,直到与负载所需达到均衡。相对应的,当节流阀6开度变小时,泵的输出流量大于负载所需流量,使得油液通过Ls阀5向右和恒压阀4向左运动,流向敏感腔3,此时,泵的斜盘角减小,流量的需求也会变小[7]。
3 AMESim简介与仿真模型
AMESim全称为Advanced Environment for Performing Simulations of Engineering Systems(高级工程系统仿真建模环境),它是一款基于键合图思想的液压 / 机械高级建模仿真软件,具有丰富的模型库,用户可以在AMESim平台上研究任何元件或系统的稳态和动态性能,迄今己发展到10.0版本[8]。
对液压系统进行仿真研究,目前常用的建模方法主要有解析法建模、液压及其数学模型、状态空间法建模和键合图法建模[9-14]。本文应用基于功率键合图的AMESim软件进行建模仿真。如图3所示为负载敏感系统工作原理的仿真图。
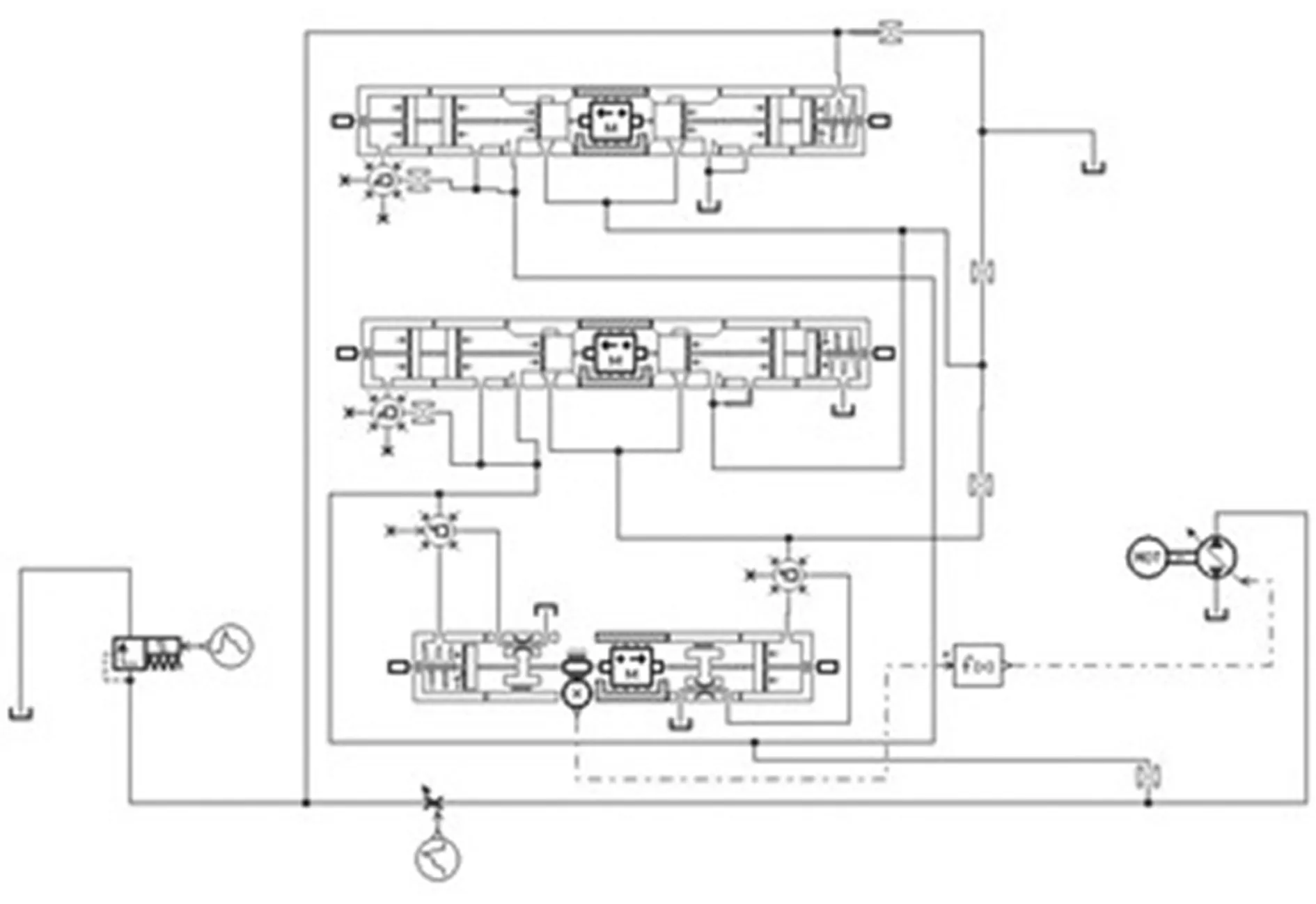
图3 负载敏感特性测试系统模型
为验证模型建立的正确性及进行后续的仿真研究和动态特性分析,AMESim环境中,图3模型是在建立一个负载敏感的测试回路,其中由比例溢流阀调节负载压力模拟外负载变化,节流阀模拟外负载的流量需求,溢流阀的输入信号变化及节流阀开度的大小由控制库中的信号发生器给出。对负载敏感系统做了一定的简化,忽略了泵、电机和液压油的摩擦阻力[8]。
设置参数是AMESim中比较重要的步骤之一,负载敏感特性测试系统模型的部分参数设定见表1。

表1 系统模型的参数设定
4 仿真与结果分析
首先验证模型静态的特性曲线,选定的负载压力范围在0~30MPa,仿真时间设置为1s,采样时间为0.001s。仿真结果得到的下面两张曲线图,泵流量-压力仿真特性曲线如图4所示,Ls阀压差特性仿真曲线如图5所示。

图4 泵流量压力仿真曲线
在图4验证模型流量与压力的曲线中,在节流阀全开的情况下,可以看出样本曲线在压力增大时,流量有个细微下降的过程,这是由于压力增大带来的泵的流量损失造成的,而该仿真模型不予考虑。所以其理想状况下应该是一条平行直线,但是实际操作中由于恒压阀的摩擦力、黏性阻力等因素的影响,才会造成图4的结果。
同时,验证Ls阀的正确性,分别调节溢流阀的模拟负载压力为0MPa、5MPa、10MPa、15MPa、20MPa,看节流阀开度开到最大时,泵的出口压力的情况[10]。

图5 Ls阀压差特性仿真曲线
从图5所示的仿真曲线不难看出,当泵能足够流量的情况下,无论如何调节模拟负载以及节流阀开度的大小,泵的出口压力与节流阀出口压力的差值始终保持在1.4MPa左右,这也就说明,泵出口压力只与Ls阀的压差设定值有关,与外界流量需求和负载变化无关。所以,负载敏感系统应用在移栽机上的设想,可以忽略阻力的因素。
5 结束语
通过对树木移栽机的认识与了解,结合液压技术的相关知识,对其在不同环境下,系统提供压力也是不同的这一论断,提出了在树木移栽机液压系统中应用负载敏感系统的课题,来解决实际操作过程中存在的问题。经过仿真分析与证明充分的展示了树木移栽机应用负载敏感系统的必要性,当外界负载的需求变大时,无需手动调节,依靠负载敏感系统就可以顺利的完成各项工作,这同时也解决了压力与外界负载变化无关的课题。
【参 考 文 献】
[1]李耀建.“大树进城”的问题与对策[J].浙江树人大学学报,2003,3(1):75-78.
[2]武 科,陈永成,毕新生.几种典型的移栽机[J].新疆农机化,2009(3):12-14.
[3]黄忠华,张明霞,钱雪强,等.基于AMESim的新型液压抽油机系统仿真[J].液压气动与密封,2013(1):41-43.
[4]周 杰.树木移栽机机械结构设计与有限元分析[D].哈尔滨:东北林业大学,2013.
[5]李永旭.液压挖掘机工作装置与液压系统设计的研究[D].上海:同济大学,2006.
[6]吴正明,史青录,白鹏伟,等.基于AMESim负载敏感系统的仿真分析[J].工程机械,2013(44):38-41.
[7]金胜秋.基于AMESim的液压同步阀的仿真分析及结构研究[D].长春:吉林大学,2009.
[8]刘海丽.基于AMESim的液压系统建模与仿真技术研究[D].西安:西北工业大学,2006.
[9]周 杰.模型参考自适应电液位置伺服系统仿真[J].森林工程,2013,29(2):68-73.
[10]杨红义,潘 静,杨红梅.基于ANSYS圆锯片动态性能研究[J].林业机械与木工设备,2010,38(4):24-26.
[11]刘凤波.基于Pro/E与ANSYS的小型电动汽车驱动桥壳设计[J].林业机械与木工设备,2010,38(5):41-43.
[12]周兆兵,曹平祥.基于Pro/E和ANSYS的木工铣削刀具用液压夹紧轴套薄壁结构的设计[J].林业机械与木工设备,2010,38(9):42-44.
[13]战 丽,宫乙帅,王毅亮.基于ANSYS的林间锯段机进料凸轮机构设计[J].林业机械与木工设备,2012,40(4):41-44.
[14]冯 刚,江峰.负载感应系统原理发展与应用研究[J].煤矿机械,2003(9):27-29.
