柴电混合推进模式在8000kW海洋救助船的应用
2014-09-09王双喜
王双喜
(镇江赛尔尼柯电器有限公司,江苏 镇江 212009)
柴电混合推进模式在8000kW海洋救助船的应用
王双喜
(镇江赛尔尼柯电器有限公司,江苏 镇江 212009)
针对船舶推进系统采用柴电混合推进模式大部分设备及控制技术主要依赖进口的问题,研究动力系统柴电混合推进模式配套的主配电板及功率管理系统(PMS)的相关功能,同时结合航行试验时对混合推进模式的不同进入方式过程中的主要工作参数及变化进行了分析。在8 000 kW海洋救助船系泊及航行试验中,柴电混合推进模式的功能测试及技术性能达到预期效果。
救助工作船;柴电推进;配电板;限流启动;动态进入;静态进入
0 引言
为了节能减排,平台守护、救助等双机双桨船舶在低速巡航时采用柴电混合推进模式。柴电混合推进模式的难点之一是作为电推的电动机如何起动,目前采用较多的是自耦变压器降压起动、小电机拖动起动、双轴带发电机并车起动及限流起动等方式。前2种起动方式均需要增加额外的机电设备,成本高、占用空间大;双轴带发电机并车起动虽是最为简单的方式,但每次进入柴电混合推进模式前必须将2台主柴油机全部起动,额外消耗一定能源,且如果其中1台主柴油机因故不能起动将无法进入柴电混合推进模式;而与限流起动技术相配套的PMS系统一直被国外所垄断。
本文研究的8 000 kW海洋救助船的柴电混合推进系统,采用动、静态2种进入方式的柴电混合推进模式,在不同航行工况时均能发挥较高的推进效率,可提高船舶的运行安全可靠性。
1 船舶推进系统
推进系统分左右2套系统,每套推进系统包含主柴油机、齿轮箱、变距桨、轴带发电机(同时可作电动机)等,其中,主柴油机功率为4 500 kW,转速为750 r/min。为了实现柴电混合推进,其齿轮箱采用1入2出结构,由3个离合器进行切换控制。
图1为左推进系统示意图,右推进系统与之对称。正常航行时,由柴油机进行推进。主离合器J1啮合带动推进轴高速旋转,PTO(功率输出)离合器J2啮合带动轴带发电机旋转发电,PTI(功率输入)离合器J3脱开。

图1 推进系统示意图
船舶处于低速巡航时,为了节省能源降低排放采用单主机运行、柴电混合推进模式。船舶若一侧推进系统进入主柴油机推进模式即PTO模式,另一侧推进系统则进入电力推进模式即PTI模式,两侧的PTO、PTI模式可任意选择以保证两侧柴油机均衡工作。
因轴带发电机功率(本船为2 400 kW)远小于柴油机功率,为了优化推进效率,PTI模式时推进轴进入低速旋转,PTO侧推进轴也进入低速旋转。这样两侧的推进轴以同样转速旋转,防止主机过载和增加船舶操控性。
柴电混合推进的PTO侧离合器状态为:主离合器J1脱开,PTO离合器J2和PTI离合器J3啮合;PTI侧离合器状态为:主离合器J1和PTO离合器J2脱开,PTI离合器J3啮合。
2 电站组成
2.1电制
本船采用400 V 50 Hz 三相三线制绝缘系统。
2.2发电机
发电机主要包括3台530 kW主柴油发电机、2台2 400 kW轴带发电机(电动机)、1台100 kW应急发电机。
2.3配电板系统结构
配电板汇流排系统示意图如图2所示。图中,SG1、SG2分别为左、右轴带发电机;BS1、BS2、BS3为联络开关;QS为隔离开关;DG1、DG2、DG3分别为左、中、右柴油发动机。

图2 配电板汇流排系统示意图
2.3.1A汇流排
A汇流排由左轴带发电机SG1供电,并对前艏侧推及拖缆机供电。通过BS1联络开关与C汇流排相联接,再经BS3联络开关与B汇流排相联接。
2.3.2B汇流排
B汇流排由右轴带发电机SG2供电,并对后艏侧推及艉侧推供电。通过BS2联络开关与D汇流排相联接,再经BS3联络开关与A汇流排相联接。
2.3.3C汇流排
C汇流排由左柴油发电机DG1供电,并对船舶部分日用负载供电。通过BS1联络开关与A汇流排相联接,再经QS隔离开关与D汇流排相联接。
2.3.4D汇流排
D汇流排由中柴油发电机DG2、右柴油发电机DG3供电,并对船舶部分日用负载供电。通过BS2联络开关与B汇流排相联接,再经QS隔离开关与C汇流排相联接。
3 柴电混合推进供电方式
船舶处于混合推进模式时,挂在C/D汇流排上的日用负载由柴油发电机供电,由PMS监管负载大小决定供电柴油发电机数量。
PTI侧由PTO侧独立、直接供电,拖缆机和侧推禁止运行。
2台轴带发电机可交互使用,即1台轴带发电机可作为PTI而由另1台轴带发电机供电。
图3为SG1作为PTI使用的混合推进供电情况示意图。
由于A、B、C楼生活污水设计管道按照3‰坡度至市政接入管道位置标高低约50 cm,同时还与DN 1000清水管标高一致并要穿过药师弄马路,需要避让。故采取了提升方式,提升井尺寸为2 m×1.8 m×3 m(长×宽×高),提升泵选用自动搅匀潜水排污泵Q=30 m3/h,扬程10 m,功率3 kW,采用两台,互为备用,同时自带配套控制柜。
在巡航速度较低情况下,主机功率和轴带发电机功率较富裕,PMS可控制C/D汇流排由轴带发电机供电,全船只有1台主柴油机运行,从而达到最大节能减排效果。其供电示意图如图4所示。

图3 SG1作为PTI使用的混合推进供电情况示意图

图4 SG1作为PTI,SG2同时对全船供电示意图
4 进入柴电混合推进模式的电站控制
柴电混合推进电站管理的重点是PTI的进入方式,也就是PTI侧的电动机起动方式。目前采用的起动方式有自耦降压起动、变频起动、小电机起动等多种方式,这些起动方式有一个共同缺点就是成本高,占用空间大。本船的机舱特点是设备多,空间有限,无法采用上述起动方式。经综合考虑,本船采用动态进入和静态进入2种起动进入方式。
4.1动态进入
动态进入是由处于恒速运行状态的左、右2台主柴油机分别驱动两侧的轴带发电机和推进轴运行,即PTI侧处于动态。齿轮箱为切换到低速驱动推进轴模式:主离合器J1脱开、PTO离合器J2和PTI离合器J3啮合。
在PMS管理下,将A/B汇流排与C/D汇流排分开(BS1、BS2分断),C/D汇流排由柴油发电机供电,控制左、右轴带发电机通过BS3并车运行。当并车完成后,PMS送一控制信号至主推进控制系统将PTI侧的PTO离合器脱开,并送一信号控制PTI侧的发电机进入电动机运行模式。此时可将PTI侧的主机停机,船舶进入柴电混合推进模式。
此时船舶的驱动方式是:PTO侧的主机低速驱动变距桨并带动轴带发电机发电,供给PTI侧电动机(轴带发电机)低速驱动变矩桨,船舶进入低速航行状态。动态进入PTI的电流实测曲线见图5。

图5 动态进入PTI电流实测图(Imax=595 A)
上图是动态进入过程变距桨螺距为零时的电流曲线。由图5可看出,动态进入非常平稳,冲击电流很小。动态进入PTI的优点是起动平稳,没有增加额外的硬件,成本低;缺点是必须双侧主机具备运行条件,如果单侧主机出现故障船舶则无法进入柴电混合推进模式。
4.2静态进入
为了解决动态进入的缺点,即在单主机运行情况下也能进入柴电混合推进模式,如单侧主机故障或在锚地起航时起动单主机(避免起动双主机的能源消耗),本船设计了PTI处于静态(即停止状态)时进入柴电混合推进的起动方式。
本船配备的轴带发电机型号为DSU99K1-4。AVR调节器配置SR2-80限流模块。
作为发电机使用时,如果激活SR2-80模块,发电机的最大电流将会被限制,其最大电流值可以进行设定。同时该发电机设计了作为电动机用时可具有异步起动功能,即异步起动同步运行。
静态进入前PTO侧主推进系统的主柴油机处于恒速运行状态,齿轮箱切换到低速驱动推进模式,即主离合器J1脱开、PTO离合器J2和PTI离合器J3啮合;PTI侧主柴油机处于停机状态,齿轮箱的3个离合器均处于脱开状态。
静态进入柴电混合推进的电站控制完全由PMS自动管理。在静态起动前,将C/D汇流排与A/B汇流排分开(BS1、BS2分断),C/D汇流排由柴油发电机供电。控制PTO侧发电机、PTI侧电动机处于灭磁状态,并将SG1、SG2进行电联接即SG1/SG2主开关和BS3合闸。此时PTO侧发电机未发电,PTI侧电动机处于静止状态。
PMS控制PTO侧发电机的限流模块S2-80激活及励磁线路接通并进行2~3 s的充磁,PTO侧发电机开始发电,PTI侧电动机开始异步起动。当PTI侧电动机达到额定异步转速时,PMS控制PTI侧电动机励磁线路接通拉入同步运行。其起动过程的实测电流曲线如图6所示。
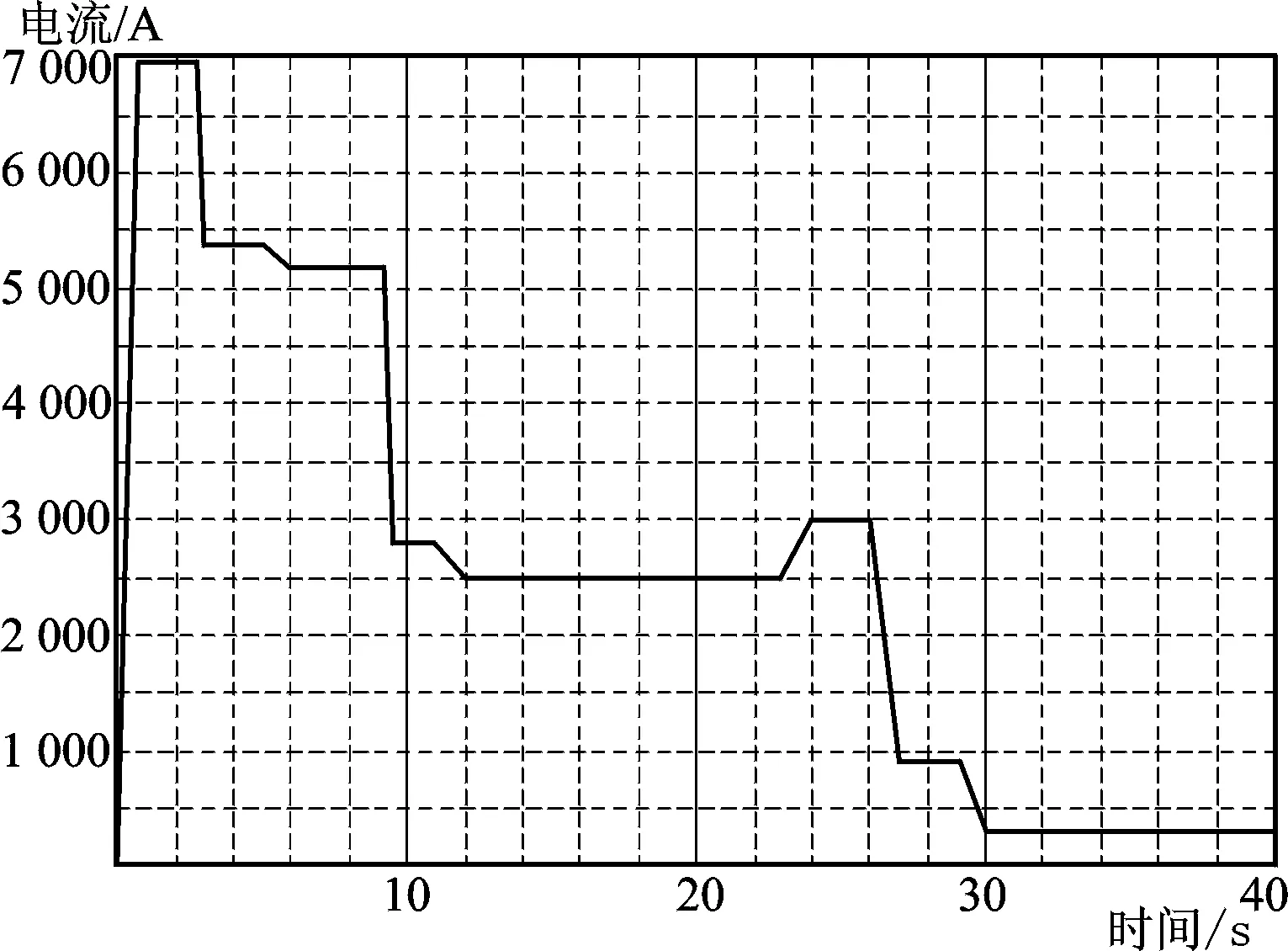
图6 静态进入PTI电流实测图(Imax=6 947 A)
从电流曲线图可知,在投入PTI模式的限流异步启动开始时,发电机励磁投入后,输出电流瞬间升高至近7 000 A后不再升高。这个电流值是限流模块在起作用,约为额定电流的1.6倍。
PMS检测到PTI侧电动机进入同步运行后将其控制在电动机运行模式并送一信号至主推进控制系统,控制PTI侧齿轮箱的PTI离合器J3啮合(合排)驱动推进轴旋转。因驱动轴转动惯量大,在合排时有一定的冲击。合排电流实测曲线如图7所示。
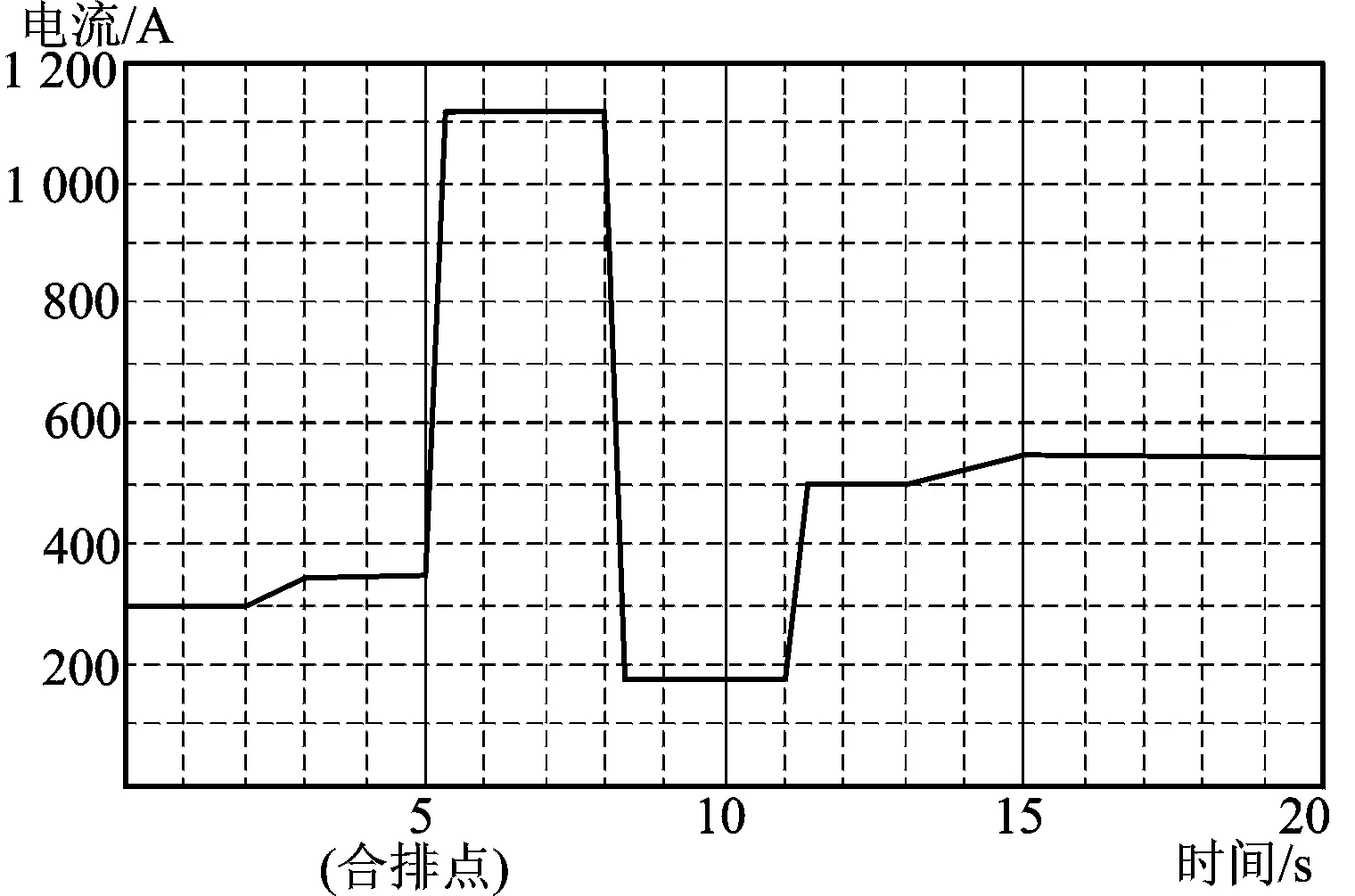
图7 静态进入PTI时合排电流实测图(Imax=1 113 A)
5 柴电混合推进的保护
5.1发电机长延时保护
由图7可知,在PTI静态起动时虽然有限流功能但电流还是较大,发电机主开关的长延时保护如果按照正常设定,在PTI起动过程可能会误跳闸。
为了解决发电机的正常保护和PTI静态起动保护之间的矛盾,在功率管理模块中增加发电机长延时保护功能,按规范要求进行设定。在静态起动时将其关闭,在正常运行时打开。
5.2PTI运行时逆功保护功能抑制
在作为PTI运行时,其功率相对于发电机状态时是反向的,也就是处于逆功状态,这时须对逆功保护功能进行处理,否则PTI侧的主开关将会因逆功而跳闸。常用方法是将电流互感器的2次电流信号用继电器进行切换,使在PTI时测量系统不产生逆功。但互感器的容量较小,2次电流对电阻非常敏感。当继电器触头的接触电阻达不到要求时,整个测量系统包括电流、功率、无功、功率因数等与电流相关的电参量都会产生偏差,影响系统运行安全。为了提高系统运行的可靠性,本船在PTI运行模式时直接将逆功保护模块的逆功保护功能关闭,使PTO、PTI逆功保护实现无缝切换。功率表则用+/-偏转方式,当正向偏转时是发电机,反向偏转时是电动机。
5.3同步电动机的失磁保护
轴带发电机在PTO运行模式时是同步发电机,在PTI运行模式时是同步电动机。同步发电机如果失磁(励磁线路故障)其主开关会因失电或逆功(与其他发电机并车运行时)而跳闸。而同步电动机一旦失励将立即进入异步运行状态,工作特性变坏,功率因数和电效率严重下降。PMS系统根据这一特性用监测PTI运行的无功来进行保护。一旦发生失磁,系统发出报警,提醒操作人员排除故障或发出指令退出PTI系统。图8为PTI在正常运行到失磁时的无功变化曲线。
6 结语
本系统中的静态进入PTI运行时,当异步启动完成后进行投励时,存在时间点的控制问题。如果投励时的转子磁场和定子旋转磁场相位角相差过大会产生很大的冲击电流,本船实测到近9 000 A。虽然轴带发电机厂家声称此冲击电流在发电机可承受范围之内,但此冲击电流对整个系统还是有害的。要解决这一问题需要增加轴带发电机的转子磁场和定子旋转磁场相位角检测装置。

图8 PTI运行时的失磁无功实测曲线(kVar)
柴电混合推进的难点是其牵涉到主机及主推进系统、主机遥控系统、发电机等,控制复杂、接口多、协调工作量大。由于8 000 kW海洋救助船柴油混合推进模式的前期经过了充分技术论证、精心准备和工厂模拟调试,在实船实验时一举取得了成功。但在整个柴电混合推进系统里的很多技术还是要依赖进口,如发电机的限流技术等。
在当今畅导绿色环保时代,对于经常执行低速航行任务的船舶如救助船、平台守护船、海监船等,采用柴电混合推进是一个很好的节能方案,值得推广应用。
[1]宋华屏. 16 400 t化学品船的PTI/PTO系统研究[J].江南集团技术,2003,(3):11-25.
[2]聂延生,刘镇宇,刘运新,马会普.船舶轴带电机及其PTO/PTI工作方式的原理和应用[J].航海技术,2006,(4):42-43.
[3]柳青,张志田.同步电动机失步原因分析、产生的危害及防护措施[J].湖南工业职业技术学院学报,2001,1(2):6-8.
2014-05-24
王双喜(1963-),男,高级工程师,从事船舶配电设计与研究。
U664.81
B
