机载LiDAR航线规划系统的设计与实现
2014-09-07缪志修
缪志修,赵 龙
(中国中铁二院工程集团有限责任公司,四川 成都 610031)
机载LiDAR航线规划系统的设计与实现
缪志修,赵 龙
(中国中铁二院工程集团有限责任公司,四川 成都 610031)
航线设计是机载LiDAR航飞过程中的重要环节,而传统航线设计方法没有考虑地形信息,也就无法准确计算出航线的扫描范围,在高山区域可能会出现航摄漏洞的情况。在深入研究机载LiDAR航线设计原理的基础上,开发出一套基于DEM的机载LiDAR航线规划系统。实验表明,文中系统不仅能够计算出最优的航线飞行方案,同时能够根据DEM实时查看设计航线的覆盖范围。
机载LiDAR;航线;自动优化;漏洞查询
目前,机载LiDAR航线规划软件都是由硬件厂家自带,如Leica的FPES,Optech 的ALTM航带设计软件。这些软件算法都是不公开的,各软件中通用性差,且没有充分考虑地形起伏对最终获取数据的有效覆盖面积的影响,会出现摄影漏洞情况。为避免航带设计造成摄影漏洞一般都是增加旁向重叠度,造成了飞行效率的降低,增加了摄影成本。本文结合单位生产实际,开发一款基于DEM的航带设计辅助软件,该软件不仅能够对测区的航线进行自动的优化得到最佳航向角,同时能够自动计算每条航线的真实覆盖范围。
1 功能模块设计
本文航线设计的功能模块如图1所示。
图1 LiDAR航线设计模块
1.1 数据加载
该软件使用的DEM地形数据为SRTM上下载的数据,数据格式有.asc,tif等格式。加载后DEM的显示方式按高程显示颜色。加载测区范围数据为.dxf格式。
1.2 航线自动优化
根据测区的范围自动调整航线,使测区内的航线飞行时间最短。
1.3 航线编辑
在航线设计时,有时需要对所设计的航线进行调整,在调整结点时,软件能够实时动态相应地改变航线的位置、长度、航线数以及飞行时间等信息。
1.4 激光及相机参数计算
通过计算测区内的激光平均点间距和影像分辨率,可以判读该设计的航线是否满足项目设计书的要求,如果不满足,要相应地改变脉冲频率、飞行速度、扫描角及飞行高度等参数。
1.5 航线漏洞查询模块
通过设计的航线在DEM上的投影,可以直观地查看该测区的航线是否存在漏洞,以及是否设计的航线过于保守等,来达到设计最优、最高效的航线。航线漏洞查询的原理是根据实时扫描带宽与航线间距的大小进行的。
1.6 结果统计及数据导出
对设计好的航线,导出航线经纬度信息以及航线长度、飞行面积、飞行时间等信息数据供机长和LiDAR航摄员使用。
1.7 飞机安全提示
通过计算每条航线的前方及侧方的最高点高程,来判断飞机飞行是否安全。如果不满足安全要求,将给出提示。对于运5或是运12,要保证飞机的飞行安全,一般是要求飞机前方安全距离在4 km以上,侧方在3 km以上。所谓的安全距离,一般是飞机离测区内地形的最高处大于400 m。
2 航线设计步骤及航线坐标计算
2.1 航线设计步骤
机载LiDAR航线设计的一般步骤如下:
1)加载测区DEM数据。
2)加载测区范围数据。
3)根据测区面积及测区内地形情况进行合理的分区。
4)根据航飞任务书的要求对每个分区进行航线参数的设置。
5)根据设置的参数进行航线的优化。
6)对优化后的航线进行漏洞查询。
7)查看设计的航线是否满足飞机飞行安全。
8)导出所有分区的设计数据。
2.2 航线坐标计算
在进行航线设计时,需根据航飞区域的飞行范围,进行最优航向角的计算。计算原理是通过计算最短的飞行时间(激光发射时间加上飞机转弯时间)来实现。在得到飞机飞行的航向角后就可以进行航线坐标位置的计算,计算方法如下:
1) 首先通过高斯正算将经纬度坐标转成平面坐标。
2) 找到飞行测区范围中最大X值(东坐标)、最小X值、最大Y值(北坐标)和最小Y值。然后以Y值最大的一个点作为起点,以航向角作为斜率,计算这条直线与其它多边形边的交点。需要注意的是这些交点中有些是不在多边形线段内的,而是在多边形边的延长线上。在这些计算得到的交点中,保留多边形边内的点,舍弃多边形边延长线上的点。一点是在线段内还是线段外,可以通过计算该点到线段两端点的距离之和是否和线段的长度一致来判断,如果相等则在线段内,不等则在线段的延长线上。
3) 根据机载LiDAR的相关参数,计算出航线的间距。下一条航线端点的计算是根据航向角以及航线间距进行计算。同理保留多边形边内的点,舍弃多边形边延长线上的点。
4) 航线退出的条件是:这条航线与多边形线段内的交点个数为0,即没有任何交点在线段内即可退出。
3 系统运行实例
本文根据设计的算法,采用C#和面向对象图形渲染引擎OGRE库,对航线规划系统进行编程与实现。图2为加载DEM与测区范围数据的显示效果。其中DEM颜色按高程值显示(红色代表高程高的地方,蓝色代表高程低的地方)。
根据航线任务设计书中的要求,对测区进行分区,并计算出每个测区的最优航线,图3、图4为设计的结果图。
图5、图6为航线漏洞查询模块的实现。从图中可以看出设计的航线在DEM高程高的地方出现漏洞(如图中箭头所指示地方),而在高程低的地方的重叠度覆盖较大。因此需要重新对航线进行设计。
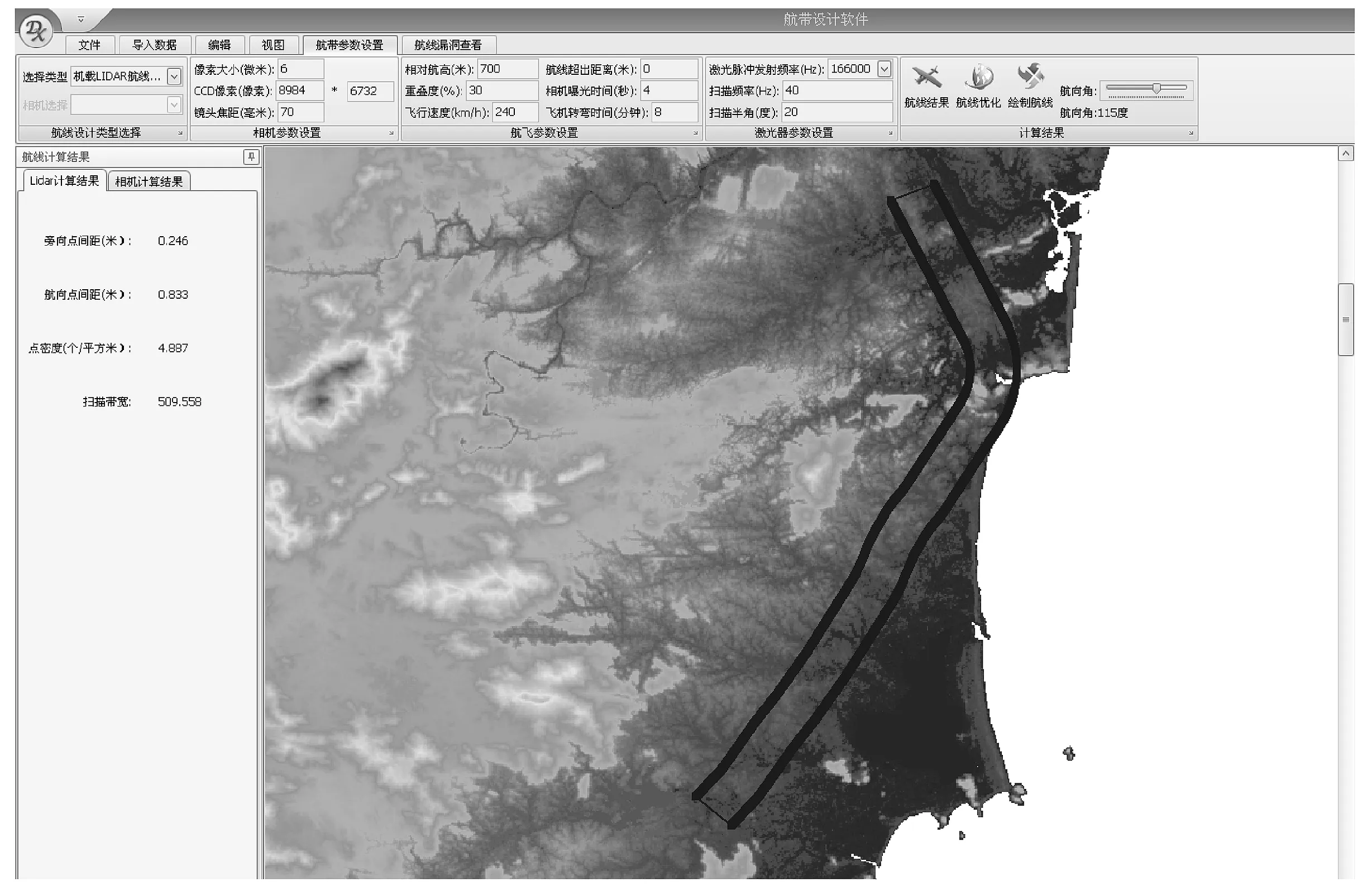
图2 显示地形和测区范围数据
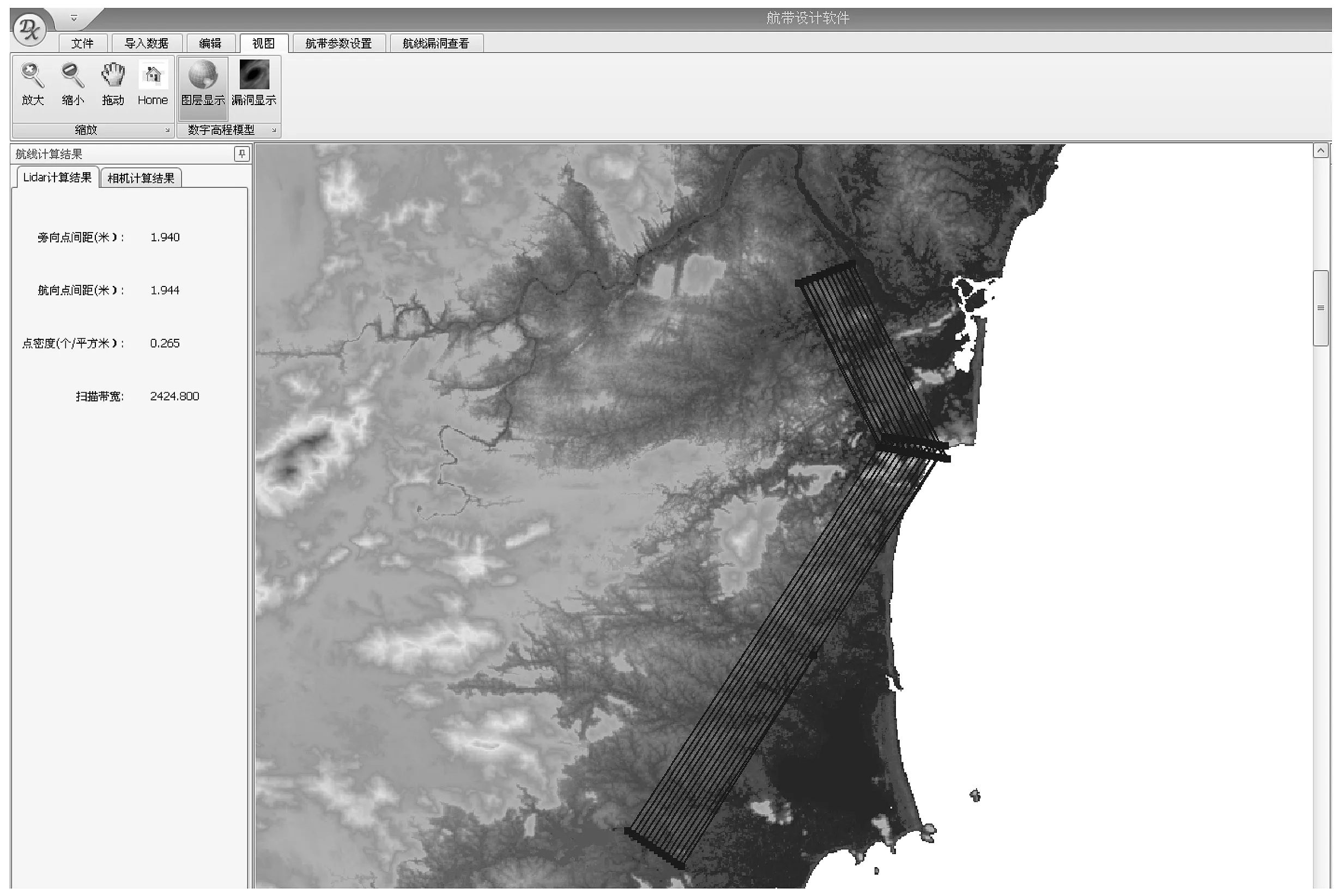
图3 计算出的最优航线
图4 计算出的最优航线(不显示DEM)
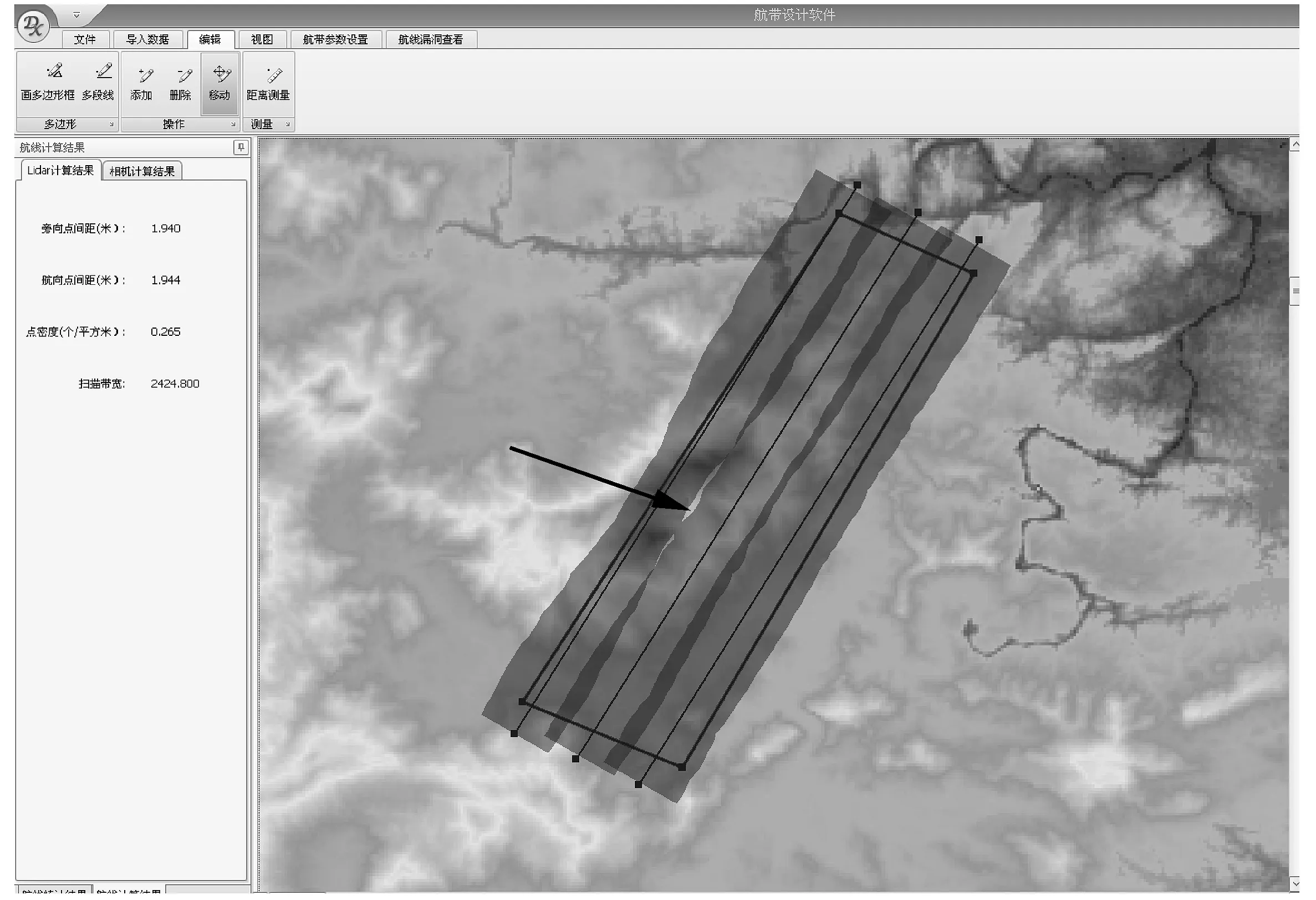
图5 机载LiDAR漏洞查询
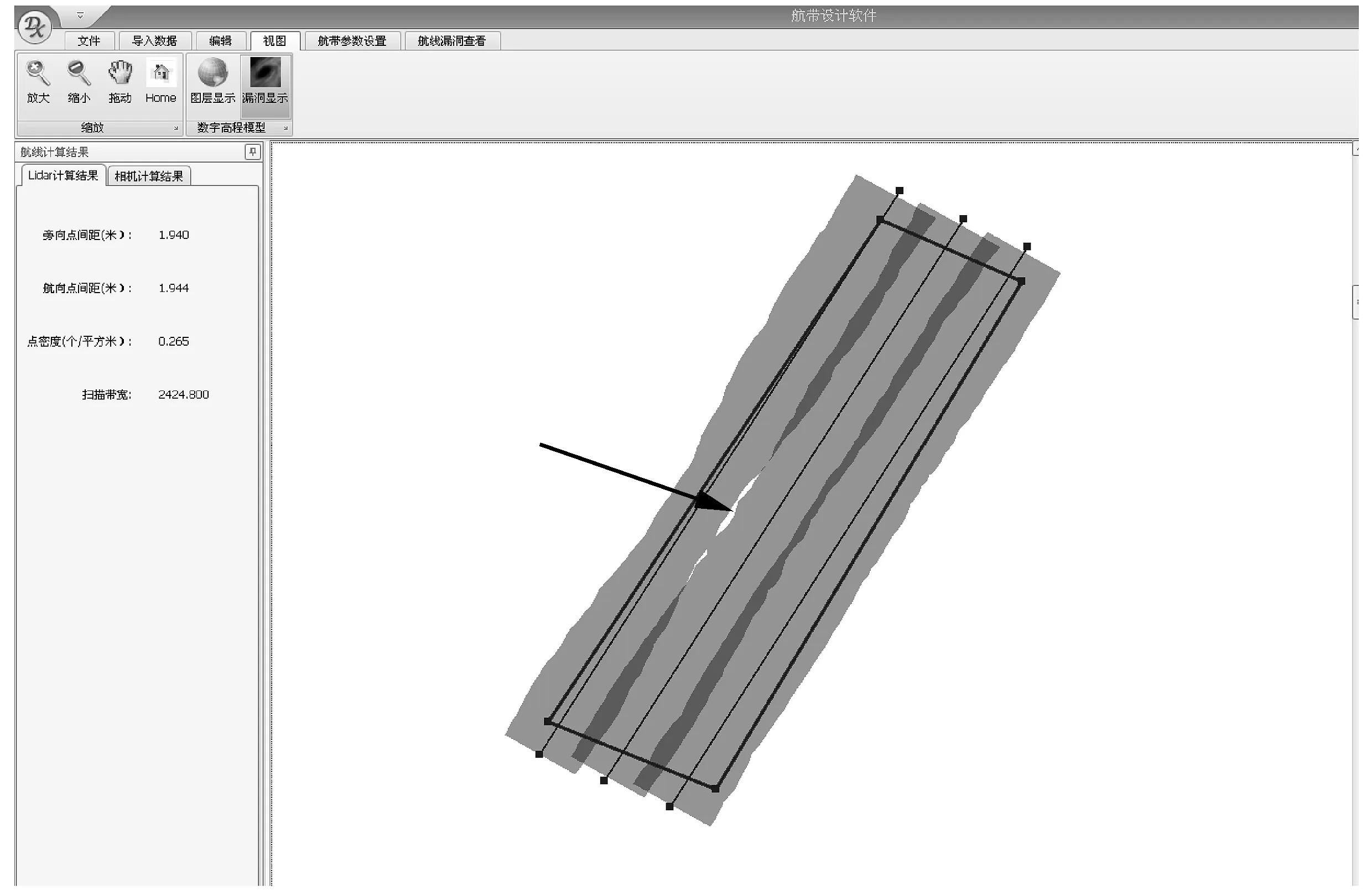
图6 机载LiDAR漏洞查询(不显示DEM)
4 结束语
本文结合实际生产需要开发了机载航带设计软件,该软件能够按照设计书的要求计算出激光及相机的设计结果,同时能够根据航飞范围自动计算出最优的航线,并能够对设计出的航线进行航线漏洞的查询。另外该软件能够对每条航线进行安全提示,保证飞机飞行的安全。
[1]赖旭东.机载激光雷达基础原理与应用[M].北京:电子工业出版社,2010.
[2]国家测绘地理信息局.CH/T8024-2011机载激光雷达数据获取技术规范[S].北京:测绘出版社,2012.
[3]中国民用航空局.GB19294-2003 航空摄影技术设计规范[S].北京:中国标准出版社,2004.
[4]缪志修,黄华平,林国庆,等.机载LiDAR航带设计问题探讨[J].铁道勘察,2012(2):20-22.
[5]程垒.国产AOE机载激光雷达飞行作业技术研究[D].青岛:山东科技大学,2008.
[责任编辑:刘文霞]
Design and realization of airborne LiDAR route planning system
MIAO Zhi-xiu,ZHAO Long
(China Railway Eryuan Engineering Group Co.Ltd,Chengdu 610031,China)
Airborne LiDAR route design is an important part of the aircraft flying process. While the traditional design methods do not consider the terrain information,it can not accurately calculate the scan range routes,and in mountainous areas aerial vulnerability may appear.Based on in-depth study of airborne LiDAR route design principle,an airborne LiDAR route planning system is proposed based on DEM.Experiments show that the system is not only able to calculate the optimal route flight plan but to view real-time coverage of the design routes based on DEM.
airborne LiDAR;route;automatic optimization;loophole inquiry
2014-04-03
缪志修(1985-),男,工程师,研究方向:地理信息系统及LiDAR数据处理应用与开发.
P231
A
1671-4679(2014)05-0011-04
