基于PIR Sensor的单目标跟踪系统的设计与实现*
2014-09-06李博雅李方敏刘新华
李博雅,李方敏,刘新华,熊 迹,李 等
(武汉理工大学信息工程学院,武汉 430070)
基于PIR Sensor的单目标跟踪系统的设计与实现*
李博雅,李方敏*,刘新华,熊 迹,李 等
(武汉理工大学信息工程学院,武汉 430070)
针对基于热释电红外传感器的人体跟踪系统在实际环境中,由于受环境噪声和硬件参数影响而误差较高的问题,本文提出了一种基于热释电红外传感器PIR Sensor(Pyroelectric Infrared Sensor)的高精度人体目标跟踪方案。该方案首先对检测区域内运动人体热辐射的红外信号特征进行了提取,然后利用PIR Sensor定位节点自身几何参数和探测数据,得到初步定位结果。最后通过Kalman滤波算法对初步定位结果进行滤波处理并更新目标的状态信息,实现对检测区域内人体目标的定位与跟踪。实验表明,该系统的跟踪误差与同类跟踪系统相比降低了71.96%,证明了该系统具有较高的跟踪精度。
目标跟踪;信号提取;热释电红外传感器(PIR Sensor);Kalman
随着信息化时代的进步,传感器定位技术逐渐成为无线传感器网络多数应用中的关键技术支撑之一[1],在当今社会中发挥着重要作用。人体运动定位及跟踪是智能监控、高级人机接口、人体运动分析、人体行为理解[2-5]等领域涉及的共性关键技术。现有的人体定位技术主要包括无线射频、超声波测量、GPS测量、基于图像和主动式红外检测法,上述方法因能耗和移动性等因素的限制,不适用于一些特殊环境。热释电红外传感器因其可通过非接触的形式检测环境中人体辐射的特定波长红外线,广泛应用于人体定位领域[6]。文献[7]中,Qi Hao等人在对基于热释电红外传感器的人体运动跟踪研究的基础上,提出了一些人体运动跟踪算法,并在文献[8]中基于PIR Sensor对人体辐射特定波长的红外线较敏感的特征,对热释电传感器外围区域进行划分和编码,通过人体在不同区域运动时产生不同编码的方法确定人体目标所处的具体位置。
实际环境中的目标定位及跟踪存在一定的误差,而节点的探测误差以及环境的引入误差是影响跟踪精度的主要因素。为减小这些因素的影响,将卡尔曼滤波算法应用于目标定位[9]及基于距离的定位算法求精过程中,可以进一步提高室内定位系统的定位精度[10]。
新加坡南洋理工大学谢立华等人开发的基于传感器网络的目标跟踪系统使用卡尔曼滤波对单/多目标进行跟踪,在一定程度上提高了跟踪精度[11]。卡尔曼滤波是一种数学上的统计估算方法,它通过处理一系列带有误差的实际量测数据而得到物理参数的最佳估算,即根据前一个估计值和最近一个观测值来估计目标的当前位置[12]。
本文采用PIR Sensor节点模块探测人体行走时辐射的红外线,对得到的不同人体以相同速度沿不同路线行走时产生的时域信号进行了特征分析,并通过基于角度的定位方法以及卡尔曼滤波算法对采集到的信号进行定位及滤波处理,将各传感器接收到的红外信号数据分解为对应于运动目标产生的观测集合或轨迹,进而估计出目标的状态,并最终实现运动人体的定位及跟踪。
1 PIR Sensor节点系统
1.1 热释电传感器
热释电效应[13]是指热释电晶体和压电陶瓷等在温度变化时产生临时电压的能力。温度变化引起这些材料在结构上出现电荷中心相对位移,极化程度发生变化,两端产生异号束缚电荷,导致在其两端产生一个电压信号[14]。
热释电传感器就是基于热释电效应原理的一种热电型红外探测元件,由密封在管壳内的传感元件、场效应管、偏置高阻及干涉滤光片构成[15],其中传感元件是覆盖有黑色吸收涂层的芯片,用于信号转换,场效应管用于阻抗变换,偏置高阻将传感元件输出的电荷信号转换为电压信号便于后期处理。当热释电传感器探测到红外信号时,黑色吸收涂层先把辐射热通量转换成温度的变化;然后再由热释电元件将红外辐射进行热电转换,从而完成红外信号到电信号的转换过程。热释电传感器旨在检测红外光强度的变化,变化速度与产生的热释电信号成正比。
常见的热释电传感器有双元型及四元型。双元是指串联在一起的两个极性相反、特性一致的探测元,外部环境或自身变化在这两个探测元上产生极性相反、大小相等的干扰信号将被抵消,达到了消除干扰的目的;四元则是指两组双元探测元并联,如图1 所示,采用了4个探测元互补的方法抑制温度变化产生的干扰,提高了传感器的工作稳定性。热释电传感器具有高信噪比、高灵敏度以及低功耗等优点,在火灾安全监控、气候控制、卫星定位控制、入侵监测以及其他环境监控等方面得到了充分的利用。
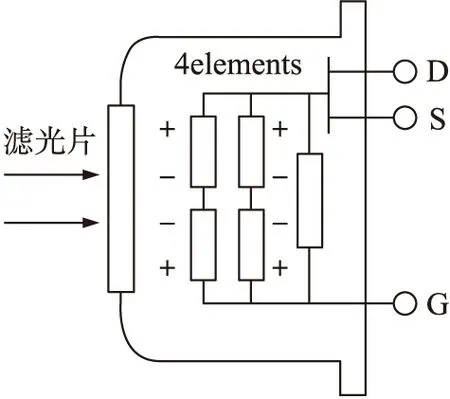
图1 四元型热释电传感器结构
1.2 系统结构
硬件系统结构框图如图2所示,由PIR Sensor节点模块、网关模块以及PC构成。其中,PIR Sensor节点模块由以下几部分构成:热释电传感器、信号处理电路、AD转换模块、单片机及无线模块。热释电传感器采集人体辐射的红外信号并将其转换为电信号,经AD转换模块处理后变为数字信号并通过无线模块发送至网关模块;网关模块将接收到的数据进行打包后通过网口发送给PC进行后期的数据处理及分析。

图2 硬件系统结构框图
热释电传感器选用D205B型四元传感器,因其内部的两组极性相反的探测元可有效的抵消外界温度或光线变化引起的误差,提高了探测准确度;同时,它的探测距离可达8 m,相对于其他型号的热释电传感器具有更大的探测距离。
每个PIR Sensor节点模块(如图2中所示的PIR Sensor Node1及PIR Sensor Node2)上布置14个热释电传感器,需14个通道用以采集数据,而每片AD仅有8个通道,因此每个PIR Sensor节点模块上需要配有两片AD。系统选用的AD通道位宽为16 bit,同时PIR Sensor节点模块以100 sample/s的采样率向网关模块发送数据,因此采集节点向网关模块发送数据的码率为25 600 bit/s,那么至少需要25.6 kbit/s的带宽,因此设计中采用了带宽为1 Mbit/s~2 Mbit/s的无线模块NRF24L01,保证了数据传送的有效性,避免了丢包现象的发生,及时地将每次采集到的数据发送给网关模块。为保证接收数据的完整性并提高接收效率,网关模块上安置两个NRF24L01,以“一对一”的方式与PIR Sensor节点模块上的NRF24L01进行数据的收发。设计中放置了两个PIR Sensor节点模块,则网关模块向PC发送数据的码率为51.2 kbit/s,而串口最大速率一般为115 200 bit/s,可满足系统需求。系统中采用TCP/IP协议的方式通过网口传送数据,便于后期设计升级(增加传感器或节点数目)。
PIR Sensor节点模块将采集到的数据先进行打包处理:将数据编码成40 byte的格式,从左向右依次为:2 byte的帧头,1 byte的节点ID,2 byte的节点编号,28 byte的数据,1 byte的校验位,2 byte的帧尾,以及4 byte的空位;然后将这些编码后的数据打包并采用顺序查询的原则发送给网关上的NRF24L01无线模块。每个PIR Sensor节点模块上安装有一个NRF24L01无线模块,而每个NRF24L01每次只能发送20 byte的数据,所以需要将编码后的40 byte数据打包为两个数据包再进行发送。
网关模块先对接收到的数据包进行拆包处理:依据帧头及对应的帧尾将原来的数据进行组装,若在组装过程中发现部分数据损坏或丢失,则将这组数据丢弃,并继续接收下一组数据包;拆包处理后的数据将被打包为一个数据包,并通过TCP/IP协议的方式被发送至PC机。
PC机将接收到的数据包进行相应的处理后显示处理结果并完成相关参数的配置。
系统中数据的发送及接收均采用点对点的通信方式,以查询的方式接收数据,使得传输速度能够满足系统的要求,保证了通信的流畅。每个PIR Sensor节点模块上有14个传感器,每秒传送100次,且2个PIR Sensor节点模块同时发送数据,导致数据量较大,因此网关通过网口进行数据的传输。
节点模块与网关模块的通信是通过无线模块NRF24L01间的ACK(自动应答)机制实现的,如图3所示。ACK机制即接收节点(本系统中指网关节点)对接收到的每帧或者每组数据帧进行确认;发送节点(本系统中指PIR Sensor节点)按照有序的方式进行数据发送,接收节点正确接收后对收到的数据报文进行ACK回复。此ACK帧的含义为接收方期待接收的下一帧,即当收到的数据无误时,接收节点将回复ACK填入接收到的数据帧序号加1的值后进行回复,否则,回复接收到的数据帧序号。此时,会有几种情况出现:其一,数据接收正确;其二,数据出现丢包现象;其三,发送节点无法收到ACK。
如图3所示,情况①为正常情况,网关节点正确接收到PIR Sensor节点发送的数据帧0,接收节点回复ACK1期待接收数据帧1。PIR Sensor节点收到ACK1后发送帧1。情况②为数据出现丢包的情况,接收节点收到帧1,但是数据校验失败,回复原数据帧序号确认帧即ACK1,发送节点收到ACK1,重传帧1。情况③为链路故障情况,发送节点无法收到ACK。可能是数据帧无法传送到接收节点,也可能是ACK无法达到发送节点。此时,发送节点将和情况②一样重传帧1。对于后两种情况,若PIR Sensor节点重传帧1累计超过10次后仍无法正确接收到ACK,则认定接收节点无法连接,通信则被中断。
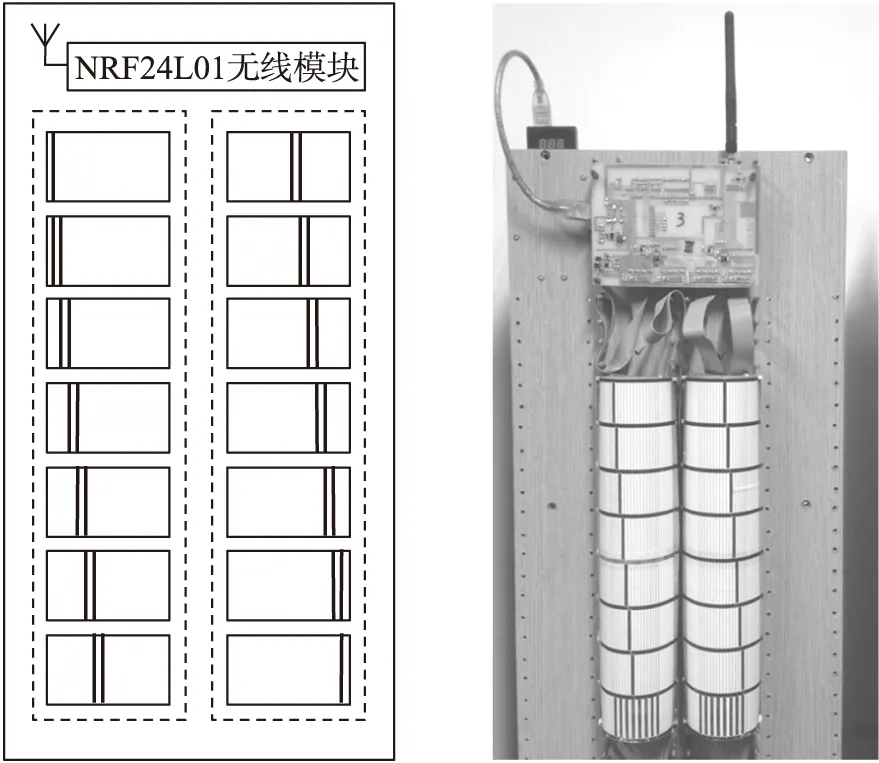
图4 节点MASK平面图及实物图
1.3 PIR Sensor节点MASK的设计
一种两列径向传感器模块可用于实现运动人体定位,如图4所示。设计中采用的PIR Sensor节点模块由14个装有径向开孔MASK的热释电传感器模块组成,排列成两列。覆有MASK的PIR Sensor节点模块将视场分割成14个角分辨率为5°的扇形区域,每个PIR Sensor节点模块具有70°的视场检测范围。
理想情况下,PIR Sensor上的感应区域面积很小,可理想化为一点,设计中MASK的半径为30 mm,则5°的角分辨率对应2.6 mm的开孔宽度,而实际的D205B型号的PIR Sensor的感应区面积为4 mm×2.6 mm,如图5所示,A点与B点实际相距4mm,此时14个分割后的视场区域存在部分重叠。可通过多次实验标定的方式提高区域分割准确率:实验者以PIR Sensor节点模块为中心沿一定半径往返行走,当行至对应扇形分割区域边界时标定MASK分割区域的实际边界,达到了矫正理想情况下边界位置的目的。以1号区域和14号区域为例说明如下:当实验者在节点模块前从1号区域向14号区域行走时,进入1号区域的边缘时,实验者辐射的红外信号会触发所对应的热释电传感器并输出一定的脉冲信号,由脉冲的起始点便可判定实验者所处位置即为1号区域的左边缘处;若实验者反向行走,脉冲信号对应于14号区域,同样由脉冲信号的起始点判定实验者的位置即为14号区域的右边缘处。
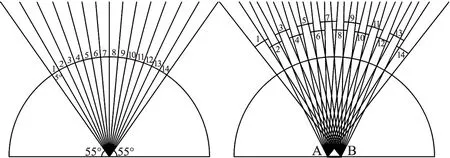
图5 MASK感应区域图
2 算法方案
2.1 Kalman滤波算法简介
系统采用角度定位的方法实现对单目标的初步定位:当人体目标在探测区域内行走时,目标辐射的红外信号被PIR Sensor检测并输出一定的电信号,此时通过对比之前设定好的阈值信号电压可得出对应节点上产生感应的传感器模块编号,进而可知对应节点上的区域分割角度值,根据区域角度值与存储于数据库中的坐标值一一对应的关系得出目标初始位置,实现了单目标的初步定位,如图6所示。
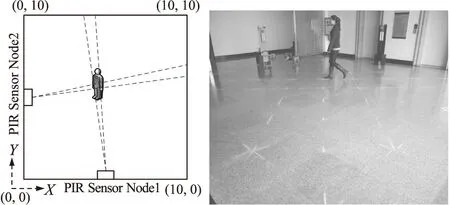
图6 目标定位示意图及实际场景图
然而通过这种方式难以获得准确的位置坐标,需要用滤波算法不断地做信息融合处理,以达到对目标的高精度定位及跟踪。这些滤波算法主要有Kalman滤波[16-17],扩展Kalman滤波[18],粒子滤波[19]等。在实际环境中噪声干扰是非常大的,因而引入相应的滤波算法是非常必要的。目标定位及跟踪在很大程度上就是在做状态估计和噪声滤除工作,因而滤波是定位及跟踪的关键所在。
卡尔曼滤波是线性无偏最小均方误差递推滤波器[20],它是用前一个估计值和最近一个观察数据来估计信号的当前值,通过状态方程以及递推的方法进行估计,其解是以估计值形式给出,因此称这种系统为线性最优估计器或滤波器。卡尔曼滤波中信号和噪声是以状态方程和量测方程表示的,因此设计卡尔曼滤波器要求已知状态方程和量测方程,在本系统(线性离散系统)中卡尔曼滤波过程的状态方程及量测方程如下所示。
状态方程:
X(k)=ΦX(k-1)+Γu(k)
(1)
量测方程:
Z(k)=HX(k)+v(k)
(2)

①状态估计的一步状态预测方程
X(k|k-1)=ΦX(k-1|k-1)+Γu(k)
(3)
②协方差预测方程
P(k|k-1)=ΦP(k-1|k-1)ΦT+Q
(4)
其中,Q是u的均方差,ω为调参数,且ω<1,Q的计算公式为:
Q=ω·diag([0.5,1])
(5)
③卡尔曼增益方程
K=P(k|k-1)HT/(HP(k|k-1)HT+R)
(6)
其中,R为系统中的观测噪声均值。
④状态更新方程
X(k|k)=X(k|k-1)+K(Z(k)-HX(k|k-1))
(7)
⑤协方差更新方程
P(k|k)=(1-KH)P(k|k-1)
(8)
通过Kalman滤波算法对本系统中初步定位结果的状态序列进行线性最小方差误差估计,对下一个状态的运动做最优估计,预测时具有无偏、稳定和最优的特定,实现了对运动目标的高精度跟踪。
2.2 算法在单目标跟踪中的应用
系统中每个PIR Sensor节点由14个热释电传感器电路组成,将空间视场分为14个扇形角度区域,两个PIR Sensor节点模块将空间视场分割成14×14=196个交叉区域,对于每个交叉区域,可取两角平分线的交点作为此区域的坐标值,将产生的196个坐标值存入数据库,形成一个14×14的矩阵。
定位思想图如图7所示,当目标在视场区域内行走时,人体辐射的红外信号被热释电传感器检测后产生并输出一定的信号,此时通过对比之前设定好的阈值信号电压便可得出两个节点上产生感应的传感器模块编号,进而可知对应节点上区域分割角度值,根据区域角度值与存储于数据库中的矩阵元素值一一对应的关系得出目标位置的坐标值,实现了目标的初步定位;接着采用Kalman滤波算法对初步定位所得位置信息进行滤波处理:通过前一个估计所得的目标位置和最近一个观察的目标位置数据来估计目标当前所处位置信息,通过状态方程以及递推的方法估计出目标位置,进一步提高了定位精度。
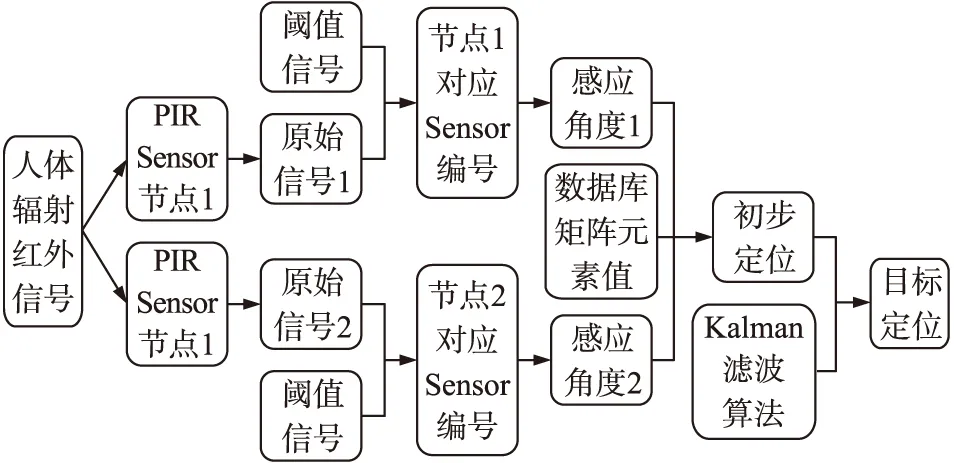
图7 定位思想图
3 实验及结果分析
实验中共放置两个PIR Sensor节点模块,分别位于6 m×6 m实验场地的相邻两边的中点处。热释电传感器的探测距离约为10 m~15 m,可以有效的检测到实验场地的各个位置。PIR Sensor节点模块上的热释电传感器距离地面的高度为0.86 m~1.15 m,因为人体头部和手部没有衣服遮挡,红外辐射较其他部位要强一些,所以这个高度有助于更有效的接收人体目标辐射的红外线。
实验中对3个实验者分别进行三类实验。实验一:3个实验者以相同的速度沿图8(a)所示路线重复行走20次,共采集60组数据;实验二及实验三:选一个实验者以实验一规定的行走速度沿图8(b)及8(c)所示六条路线行走,每条路线来回行走20次,采集240组数据。三次实验总共采集300组数据。

图8 实验路线
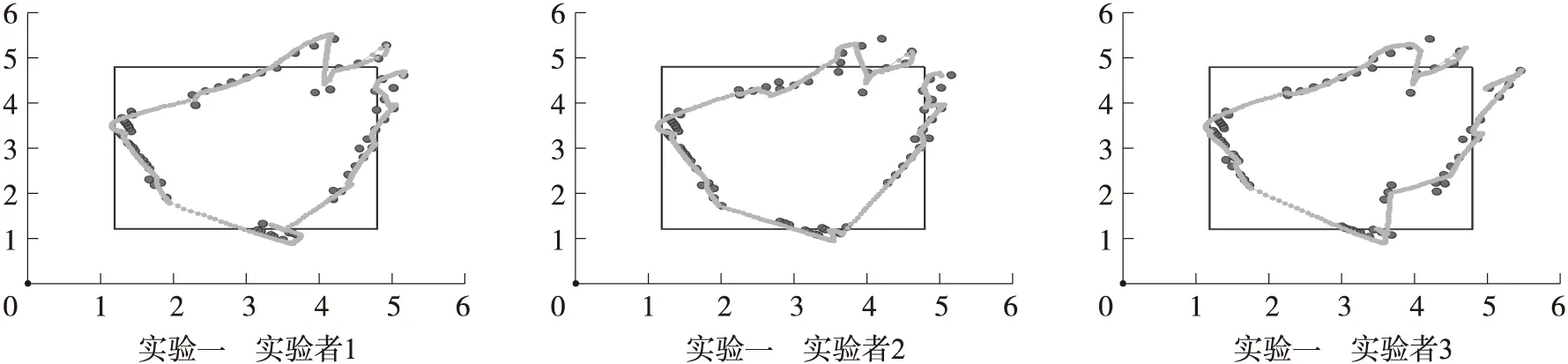
图9 实验1中3个实验者跟踪效果图
为验证本系统对单目标进行高精度跟踪的有效性,采用了本文提出的角度定位法以及Kalman滤波算法对传感器节点采集的红外信号进行定位及滤波处理,在完成角度检测的基础上进一步提高了定位精度。假设系统噪声为零均值正态噪声,MATLAB平台下的跟踪效果图如图9~图11所示。

图10 实验2跟踪效果图
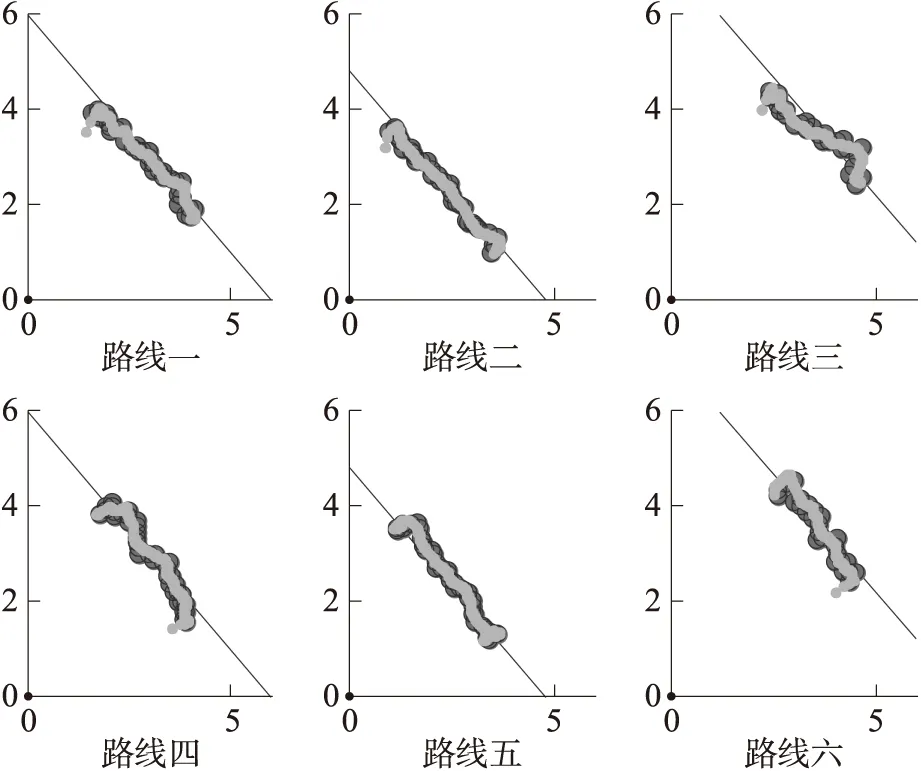
图11 实验3跟踪效果图
对于图9至图11,细直线为目标实际行走路线,黑色的点为经过角度定位法得到的初步定位点,根据黑色的点绘出的粗线则为采用Kalman滤波算法所成的跟踪路线图。由图9至图11可知,通过采用角度定位法及Kalman滤波算法得到的目标位置与目标实际所处位置的重合度较高,证明了本系统对单目标进行高精度跟踪的有效性。同时,为了证明本系统对单目标进行跟踪的精确性,统计并计算了实验误差。以实验二和实验三为例,设定采样周期为0.03 s,PIR Sensor节点模块观测噪声的均值为0,方差为0.1 m,所得实验误差图如图12及图13所示,进而可得实验二及实验三的平均误差分别为0.129 m及0.132 m。实验对比了文献[15](文献[15]中的实验路线与本文中实验二的试验路线一致,文献[15]中实验误差为0.46 m),可见误差降低了71.96%,验证了本系统对单目标进行高精度跟踪的有效性。
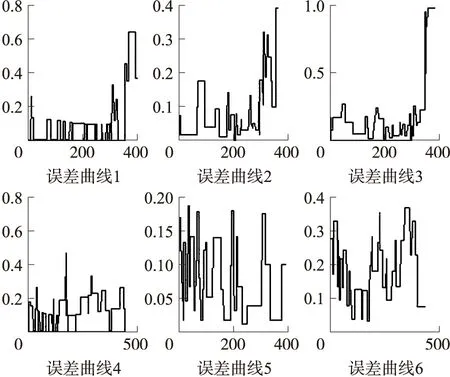
图12 实验二误差图

图13 实验三误差图
4 结论
本文设计并实现了由两个PIR Sensor节点模块组成的PIR Sensor单目标高精度跟踪系统。通过引入热释电传感器及其他元件组成的PIR Sensor节点模块对检测区域内运动人体目标辐射的红外信号进行了提取,并基于角度定位法实现对单目标的初步定位,最后由Kalman滤波算法对初步定位结果进行滤波处理,降低了误判率。实验结果表明,在一定的检测区域内,该系统的平均跟踪误差低至0.129 m,相比同类跟踪系统降低了71.96%,验证了本系统对单目标实现高精度跟踪的有效性,后期将对多目标实现高精度跟踪。
[1] Soo Kim,Jeong-Gil Ko,Jongwon Yoon,et al. Multiple-Objective Metric for Placing Multiple Base Stations in Wireless Sensor Networks[J]. International Symposium on Wireless Pervasive Computing,2007(2):5-7.
[2]候志强,韩崇昭. 视觉跟踪技术综述[J]. 自动化学报,2006,32(4):603-617.
[3]孙满法. 基于人体位置检测的商场智能照明研究[J]. 科教文汇,2008:276-277.
[4]万缨,韩毅,卢汉清. 运动目标检测算法的探讨[J]. 计算机仿真,2007,23(10):221-226.
[5]Francois Bremond,Monique Thonnat,Marcos Zuniga. Video Understanding Framework for Automatic Behavior Recognition[J]. Behavior Research Methods,2006,3(38):416-426.
[6]肖佳,杨波. 基于热释电红外传感技术的目标定位研究[J]. 红外,2011,32(12):17-22.
[7]Jian-Shuen Fang,Qi Hao,Davie J Brady,et al. Path-dependent Human Identification Using a Pyroelectric Infrared Sensor and Fresnel[J]. Optics Express,2006,14(2):609-624.
[8]Lu Jiang,Gong Jiaqi,Hao Qi,et al. Space Encoding Based Compressive Multiple Human Tracking with Distributed Binary Pyroelectric Infrared Sensor Networks[J]. IEEE Conference on Digital Object Identifier,2012:180-185.
[9]Tan Rui,Xing Guoliang,Liu Xue,et al. Adaptive Calibration for Fusion-Based Wireless Sensor Networks[J]. Infocom,2010:1-9.
[10]Yun X,Bachmann E R. Design,Implementation,and Experimental Results of a Quaternion-Based Kalman Filter for Human Body Motion Tracking[J]. IEEE Transactions on Robotics,2006,22(6):1216-1227.
[11]危阜胜,胥布工,高焕丽,等. 基于无线传感器网络的分布式处理目标跟踪系统[J]. 传感技术学报,2009,22(10):1498-1503.
[12]Zhan R,Wan J. Iterated Unscented Kalman Filter for Passive Target Tracking[J]. IEEE Transactions on Aerospace and Electronic Systems,2007:1155-1163.
[13]Urfaliglu O,Soyer E B,Toreyin B U,et al. PIR-Sensor Based Human Motion Event Classification[J]. Signal Processing,Communication and Applications Conference on Signal Processing,2008:1-4.
[14]刘岗,梁庭,林斯佳,等. 铌酸锂晶片热释电红外探测器设计及性能测试[J]. 传感技术学报,2013,26(3):333-337.
[15]徐克宝,高杰,鞠晓君,等. 具有抗环境热源干扰的热释电探测器的应用研究[J]. 传感技术学报,2006,19(3):758-762.
[16]周琳娜. 基于卡尔曼滤波的目标飞行体预测[J]. 电子测试,2010(5):23-24,54.
[17]谭菊. 基于Kalman滤波的目标轨迹预测[J]. 重庆文理学院学报,2009,28(5):28-30.
[18]Qi Hao,Fei Hu,Yang Xiao. Multiple Human Tracking and Identification with Wireless Distributed Pyroelectric Sensor Systems[J]. Systems Journal on IEEE,2009,3(4):428-439.
[19]Cheng Chang,Ansari R. Kernel Particle Filter for Visual Tracking[J]. Signal Processing Letters,2005,12(3):242-245.
[20]Qi Hao,Fei Hu,Yang Xiao. Multiple Human Tracking and Identification with Wireless Distributed Pyroelectric Sensors[J]. Systems Journal,2009:428-439.
李博雅(1989-),女,内蒙古乌兰察布人。2012年毕业于武汉理工大学信息学院,获工学学士学位,现为该校信息与通信工程专业硕士研究生。研究方向为信号处理、模式识别及应用等相关研究;

李方敏(1968-),男,湖南涟源人。教授,博士生导师,中国计算机学会高级会员,传感器网络专委会委员。1990年、1997年和2001年分别在华中理工大学、国防科技大学和浙江大学获工学学士、工学硕士和工学博士学位。主要从事无线自组织网络、新型网络体系结构、嵌入式系统等方面的工作。
DesignandImplementationofSingleTargetTrackingSystemBasedonPIRSensor*
LIBoya,LIFangmin*,LIUXinhua,XIONGJi,LIDeng
(School of Information Engineering,Wuhan University of Technology,Wuhan 430070,China)
Due to the effects of the environmental noise and hardware parameters,the tracking error rate based on the PIR sensor is relatively higher in the real environment. For this point,this paper proposed a high accuracy human tracking scheme that based on pyroelectric infrared(PIR)Sensor. Firstly,PIR sensors detect the infrared signal of the moving human in the sensing area and the characteristics of the infrared signal are extracted. Then,the geometric parameters of locating node and the detecting data are used for the preliminary positioning result. Finally,Kalman filter algorithm is used to filter the preliminary positioning result and update the target state information for realizing the human target positioning and tracking in the sensing area. Experiments show that the tracking error has decreased by 71.96% comparing with other similar tracking systems. It has been proved that the system has a high tracking accuracy.
target tracking;signal extracting;pyroelectric infrared(PIR)Sensor;Kalman
项目来源:国家自然科学基金项目(61170090)
2014-04-10修改日期:2014-08-04
10.3969/j.issn.1004-1699.2014.09.012
TP212.9
:A
:1004-1699(2014)09-1214-07
