Simulation of multi-modal control in electro-hydraulicposition servo-system*
2014-09-05GuoqingZHOU
Guo-qing ZHOU
School of Architecture and Materials,Chongqing College of Electronic Engineering,Chongqing 401331,China
Simulationofmulti-modalcontrolinelectro-hydraulicpositionservo-system*
Guo-qing ZHOU†
SchoolofArchitectureandMaterials,ChongqingCollegeofElectronicEngineering,Chongqing401331,China
Aiming at the characteristic of parameter time-varying,nonlinearity etc in electro-hydraulic position servo-system caused by oil spill,oil pollution,inert zone and hysteresis,the paper explored the multi-modal control strategy based on human simulated intelligent control.In the paper,it analyzed the open question of electro-hydraulic position servo-system,discussed the essential feature of human simulated intelligent control,summarized up the characteristic of multi-modal control and its corresponding control algorithm.The comparative study of simulation experiment in multi-modal control and PID control verified the good control quality of multi-modal control.The simulation results demonstrated that compared with PID control by means of multi-modal control it could obtain better tracking performance,static and dynamic characteristics as well as stronger robustness than PID control.
Electro-hydraulic position servo-system,Human simulated intelligent control,Multi-modal control
1.Introduction
The hydraulic servo system has been widely used for the industrial automation field resulted in lots of priority such as being big in moment etc.But there are improper phenomena in the hydraulic servo system such as oil leakage,oil pollution,dead zone and hysteresis as well as flow rate nonlinearity of valve control mechanism etc,and it makes the ubiquity of low control accuracy resulted by the characteristic in time-varying parameter and nonlinearity etc,therefore there are lots of practical problem needed to be solved.Many scholars have made effectively discussion and contributors.The reference[1] researched on control of electro-hydraulic serve position system from the control angle of fuzzy immune adaptive PID control,reference[2]explored the control of nonlinear electro-hydraulic position servo system from PID iterative learning control,reference[3] studied the fuzzy PID control of hydraulic position servo system,and reference[4-6] also researched on electro-hydraulic serve position system control from different angle,but all they are the control based on PID and its improved PID control.In fact,the control of electro-hydraulic serve position system is to indicate the control that can accurately reproduce or follow a process of controlled variable such as mechanical displacement etc.Due to some uncertainty factors resulted by time-varying parameters,cross coupling and nonlinearity etc,it is difficult to make the precise mathematical modeling,and therefore it is hard to deal with the impact of uncertain factors on the system by means of the control based on PID and its improved PID controller.This paper makes some discussion for related problems from the angle of multi-modal control in human simulated intelligent controller (HSIC).
2.Substantive characteristics of HSIC
Aiming at being less than satisfactory in tracking performance etc which is resulted in many uncertain factors of electro-hydraulic position servo system,the control strategy of HSIC is a reasonable choice[7-8].Faced on the challenges,the intuitive way of intelligent control is to seek the answer from one's own.Based on the theory of artificial intelligence and automatic control,HSIC sums up the experience of human control,and it can adopt the production rules to describe the inspiration and intuition reasoning as well as control behavior.From control theory point of view,it can describe the intuitive reasoning by means of production rules,and based on online characteristic recognition and memory it can be sum up the motion dynamic characteristic model.By means of the principle combined open and closed loop,it can implement the multi-modal control of combined qualitative decision and quantitative control.HSIC showed the following characteristics in the structure and function.The information processing and decision-making mechanism are related to the interested hierarchy,namely the information processing and decision-making mechanism of different hierarchy are different,and it is hierarchical.The characteristic recognition and characteristic memory can be online for the system with the help of the system error and its rate of change.Based on the fusion each other of open-closed loop control and quantitative as well as qualitative decision,it can actualize the multi-modal control strategy.The logic of reasoning can use heuristics and intuition in reasoning.The basic concept of HSIC is to simulate the control functions of human beings.The generalized control model of solving control problem is shown in Figure 1.

Figure 1.Generalized control model

3.Design of controller
The prototype algorithm based on HSIC is the following.

Figure 2.Algorithm static characteristic
From Figure 2 it can be seen that if it deviates the balance state zero,when the error increases gradually it takes proportional control until when the error reaches the position of an extremum the control amount runs up to the maximum.After that,the error has decreasing trend it can maintain control mode,and it makes observation and waiting for error change.If error increases towards to opposite direction,then it still adopts the proportional control and repeats the same process control roughly.After through the switching process like “proportion-holding-proportion-holding”,the system would be quickly stabilized at the new balance point.The above is the solving process for objective control amount.At the same time of switching holding and proportion modal,the control amount also is continuously modified until the system is stabilized to setting value,and the control amount is stabilized to objective control amount.Of course,if the setting value ofKpandkis different,it would bring the impact for solving process.So long as the setting value ofKpandkis proper,it can fast obtain the target control amount.
3.1.Designprocedure
1) Determine the design target trajectory
2) Establish the characteristic model
Φi=P⊙Qi,i=1,2,3,…
3) Control modal set and control rule
According to the system deviation and its change trend it designs the control or correction modal,and the control modal set and control rule is the surjective relation of one to one correspondence.It can constitute the control rule through determining control volume and threshold adjustment etc.
3.2.Designofcontrolalgorithm
The characteristic model is shown in Figure 3.In which,the horizontal ordinate shows the error of system,and the vertical coordinate shows the error change rate.The target of controller design is to make that the actual is consistent with the ideal error target trajectory as far as possible,and the dotted line in Figure 3 is as the ideal error target trajectory.

Figure 3.Control characteristic model


Aimed at different region located by system state,it should take different control strategy.Corresponding to region ①,due to the deviation large,it takes Bang-Bang control so as to reduce the deviation rapidly.Corresponding to region ②,due to the deviation change rate being not greater than the predetermined value and the deviation being reduced,it takes proportional modal control.Corresponding to region ③ and region ⑥,it takes proportional plus differential modal control.Since the deviation increases or decreases and the deviation change rate is greater than the predetermined value,and after joining the differential control it can control the deviation change rate.Corresponding to region ④,it can take the control of positive feedback proportional differential modal because of control deviation being reduced and its change rate still being not be able to reduce to predetermined value.Corresponding to region ⑤,all the system deviation and its change rate satisfy the system demand,and it takes proportional plus integral control so as to eliminate the static error.According to the above control strategy,the control algorithm can be summarized as follows.
4.Simulation experiment
In order to simplify the analysis and not to lose the generality,it takes one order inertia object with lag as the simulation model in the paper.The impact such as parameter time-varying,nonlinearity etc can be equivalent to the change such as lag,system parameter change and external disturbance etc.Then it examines the robustness of the system,so long as the control algorithm is strong in robustness,then the control strategy is advisable.It assumes the model to be asW(S)=Ke-τs/ (TS+1),and in whichKis the gain coefficient,Tis the time constant of controlled object andτis the pure lag,and then it takes respectivelyK=1,T=1.2,τ=2,after replacing the simulation is asW(S)=e-2S/(1.2S+1).
Based on Matlab environment,by means of Simulink it can construct the simulation model of system.Under the condition of unit step input,it can make the simulation for the same controlled object respectively adopting PID control and multi-modal control.Figure 4 shows the comparison of response curve for two sorts of control algorithm.From the analysis of curve 1 and curve 2 it can be seen that both curve 1 and curve 2 are not any overshoot,but the multi-modal control owns better performance index in the rise and adjusting time.

Figure 4.Comparison between response curves
Figure 5 shows the comparison of response curve for two sorts of control algorithm,and in which,it makes simulation under the condition of joining an external pulse disturbance at timet=4.5 s.From the comparison of response curve it can be seen that the multi-modal control owns stronger anti-jamming performance than PID control.
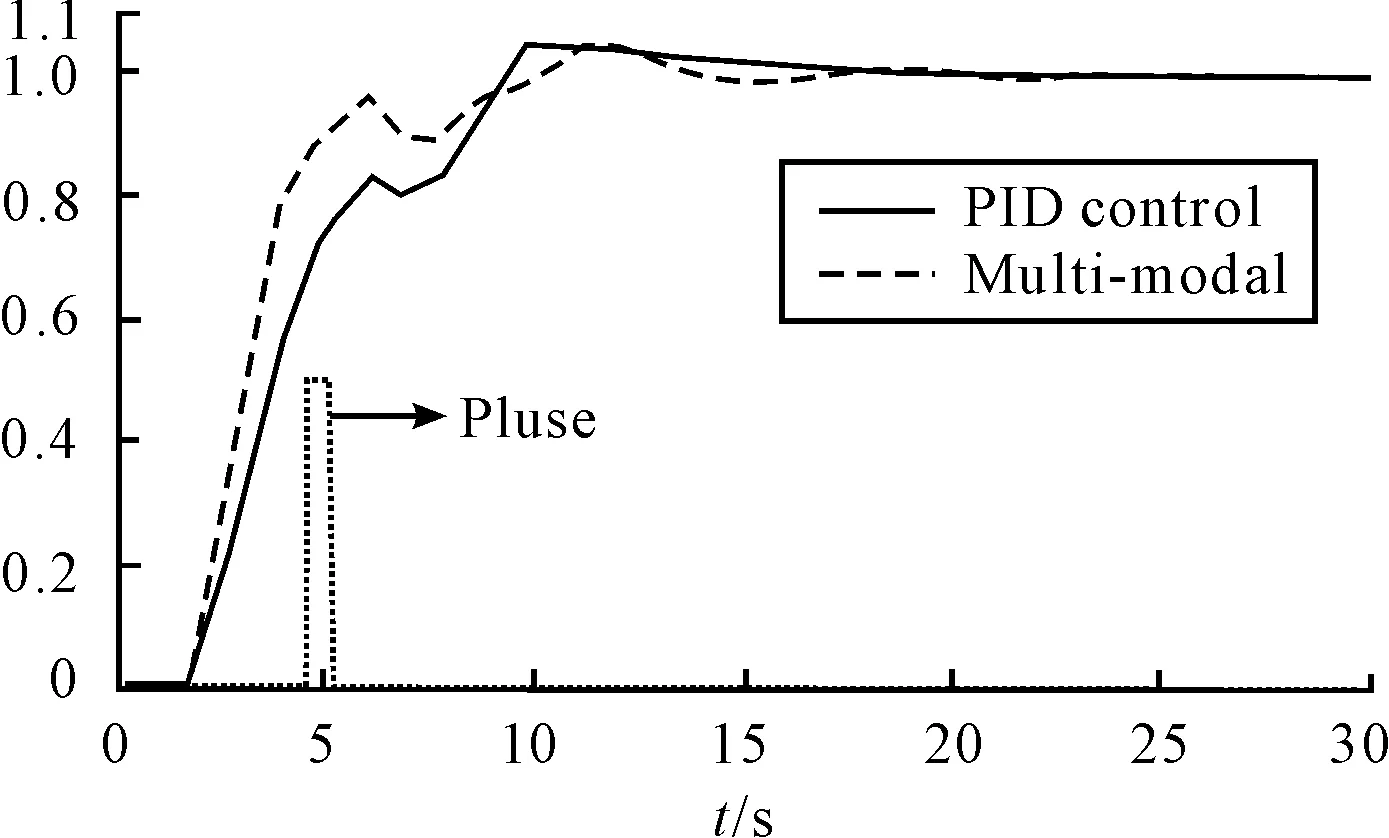
Figure 5.Comparison of response in disturbance
Figure 6 shows the comparison of response curve for two sorts of control algorithm,and in which the difference is that the original object is joined by an inertial node,namely the transfer functionW(S)=e-2S/(1.2S+1) is transformed ase-2S/(1.2S+1)(2S+1).Through the comparison of curve 1 and curve 2,it can be seen that the overshoot of PID control is greatly increased,and it gets longer in the rise and adjusting time,but the response curve is hardly changed by multi-modal control,and therefore it shows that the parameter change hardly influences system response.
The above simulation experiment shows that the multi-modal control strategy can obtain more ideal dynamic and static performance index for whatever parameter change or external disturbance,and by means of multi-modal control it can get better control quality than PID control.

Figure 6.Comparison of parameter change impact
5.Conclusion
In the multi-modal control,after each control step it must actualize the control pattern recognition according to characteristic model,and then by means of recognition result it selects the control algorithm so as to modify the system state.Therefore it can ensure the control quality of system,and implement effective control for electro-hydraulic position servo-system,and obtain better tracking performance.
[1]ZHU Bao,WU Rong-zhen,XONG Rui-ping,et al.Research for the fuzzy-immune-PID control of the electro-hydraulic servo system[J].CHINA MEASUREMENT TECHNOLOGY,2004(1): 19-21.
[2]Cao Shuping,Luo Xiaohui,Zhang Hanwen,et al.PID-type Iterative Learning Control for Nonlinear Electro hydraulic Positional Servo-system[J].Mechanical Science and Technology for Aerospace Engineering,2008,27(1): 19-22.
[3]XU Jian.Study on Fuzzy PID Control for Hydraulic Position Servo System[J].Automation Panorama,2008(4):66-68.
[4]SUN De,LE Guigao,ZHUANG Wenxu.Rocket Position Servo-system Control with Composite PID[J].Journal of Projectiles,Rockets,Missiles and Guidance,2012,32(1): 215-218.
[5]JIANG Yi,YU Junqi,KIU Xi.Fuzzy Self-tuning PID Control Algorithm of Position for MTS Hydraulic Servo System[J].Industrial Control Computer,2010,23(12): 58-60.
[6]GAO Zilong,LI Zhigang.Research of Position Servo Systems Based on Fuzzy Controller[J].MICROMOTORS,2013,46(1):67-71.
[7]LI Zu-shu,TU Ya-qing.Human Simulated Intelligent Controller[M].Beijing: National Defence Industrial Press,2003.
[8]Li Shi-yong.Fuzzy Control Neural Control and Intelligent Cybernetics.Harbin: Harbin Industry University Press,1998.
多模态控制在电液位置伺服系统中的仿真研究*
周国清†
重庆电子工程职业学院 建筑与材料学院,重庆 401331
针对漏油、油液污染、死区、滞环等因素导致的液压伺服位置系统的参数时变、非线性等特性,探讨了基于仿人智能的多模态控制策略。分析了液压伺服位置控制存在的问题,讨论了仿人智能控制的本质特征,动态控制特征模型,总结了控制的多模态特性及其相应的控制算法。多模态控制与PID控制的仿真实验对比研究验证了多模态控制具有良好的控制品质。仿真结果表明:与PID控制相比较,采用多模态控制时电液位置伺服系统可获得更好的跟踪性能、动静态特性以及更强的鲁棒性。
电液位置伺服系统;仿人智能控制;多模态控制
TP273
2013-11-24
*Project supported by Chongqing Education Commission (2012-09-3-314)
† Guo-qing ZHOU: Associate professor.E-mail: 24896300@qq.com
10.3969/j.issn.1001-3881.2014.06.022
猜你喜欢
杂志排行

机床与液压的其它文章
- Investigation of helical ball micro milling with variable radial immersion*
- Numerical simulation of the double suction balance type screw compressor working process*
- Parameter optimization of electro-hydraulic proportionalsystem of PID based on the improved ant colony algorithm
- Flying cutter machining and cutter design based on the machining principle of cycloid rotational indexing
- Optimal design and security verification of flying cutterbased on finite element analysis
- Robustness simulation of control algorithm for human-simulated intelligence based fusion*