奥迪车前端模块分装AGV机械部分设计
2014-09-05张庆玲
张庆玲
(长春职业技术学院 工程技术分院,吉林 长春 130033)
奥迪车前端模块分装AGV机械部分设计
张庆玲
(长春职业技术学院 工程技术分院,吉林 长春 130033)
对适用于奥迪汽车前端分装模块的AGV的机械结构设计进行了研究。以设计图的形式,从AGV的整体到各个分单元的结构进行了作用及结构设计的描述。
AGV;机械结构;单元设计
Automated Guided Vehicle(简称AGV)通常称为AGV小车,指装备有电磁或光学等自动导引装置,能够沿规定的导引路径行驶,具有安全保护以及各种移载功能的运输车[1]。在大型企业的生产车间,它可以减少物料的搬运时间,是提高生产效率的途径之一,因此AGV成为自动化生产车间的主要载运工具。不同用途的AGV小车,其工作原理大体相同,但因其所搬运的物料结构形状不同,以及生产车间的工作环境不同,对其机械结构也提出了不同的要求。
1 奥迪车前端模块分装AGV简介
奥迪车前端模块主要由水箱、底座支架、风扇、两侧支架、冷凝器、防护栅栏、车灯组等部件组成,其外形呈不规则状,质量大,不便于人工搬运。
一汽大众奥迪车前端模块搬运用AGV,是为一汽大众汽车有限公司奥迪总装车间提高产能、实现奥迪前端模块分装转运自动化而专门设计的,主要由以下几部分组成:前端夹具、车体框架单元、清扫刷单元、车体静电释放单元、驱动单元、驱动部调节单元、取电导航单元、控制单元。利用电磁轨道来设立其行进路线。
2 AGV主要机械部分结构设计
2.1前端夹具
前端夹具主要作用是将奥迪车前端模块搬运并送往生产线上的指定位置,因此不仅要求能夹紧物料,同时还应能将物料送往指定位置。其结构主要由前端模块装配夹具,左、右物料架组成,如图1所示,以完成奥迪前端模块的总成装配任务。

图1 前端夹具
2.2车体框架单元
车体框架单元承担着整个车体载荷,因此在设计时应考虑其运载的平稳性及安全性,还应考虑其操作的简便性,故采用4轮支承,其主要由车体框架、4个支撑轮、扫描单挂架、车体侧围板、车体上盖板等组成,如图2所示。
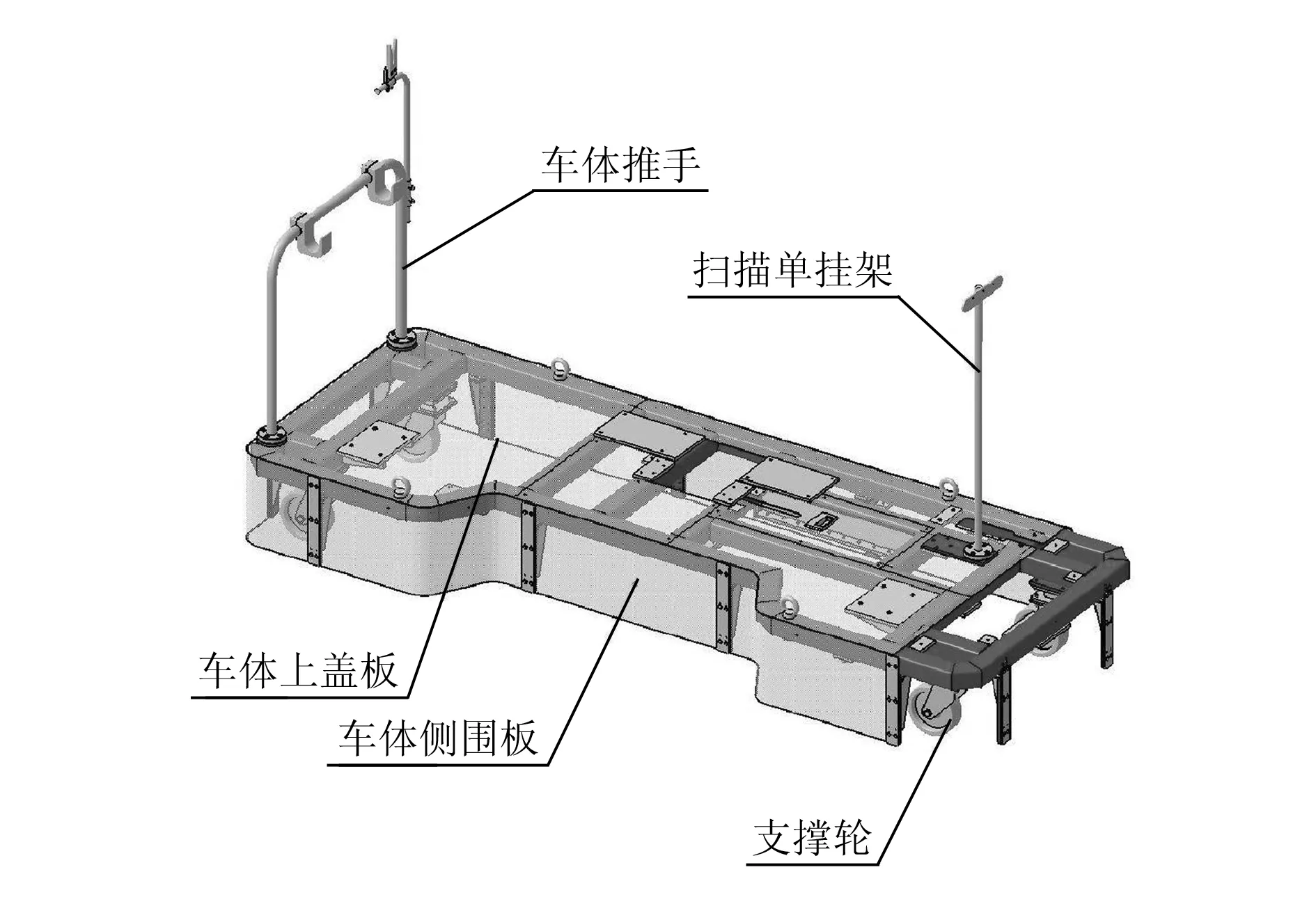
图2 车体框架单元
2.3AGV驱动单元
驱动单元根据主控信号完成小车的加速、减速、制动、转弯等功能[2]。主要由驱动电机、驱动轮、驱动单元安装板、驱动离合器组成,如图3所示。
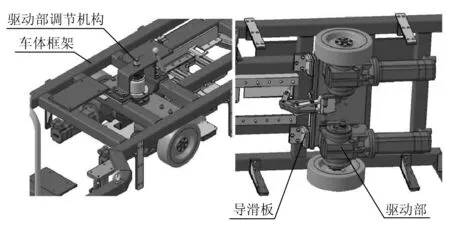
图3 驱动单元
驱动离合器主要用于驱动轮与减速机分离,驱动轮可以单独旋转,这样的好处是:如果AGV小车出现故障而不能运行时,可以将离合器分开,人工将AGV小车推到维修区维修,待维修好AGV小车后,再将离合器合上,小车就可以自动上线。如图4所示。速度调节可采用不同的方法,如用脉宽调速器或变频调速器等。AGV在直线行走、拐弯和接近停位点时要求有不同的车速。

图4 驱动离合器
2.4AGV驱动部分调节单元
驱动部调节单元将驱动部分与车体连接在一起,同时驱动部分可以沿导向轴的轴向方向滑动,导滑板确保驱动部分与车体之间不产生左右摆动,另外通过调节螺栓位置进而调节矩形弹簧对驱动部的压力,从而改变驱动部与地面接触的摩擦力,如图5所示。当AGV小车行驶在凸凹不平的路面时,驱动部分可以上下浮动,从而保证驱动轮始终与地面接触,不出现驱动轮打滑现象,保障AGV小车的正常运行。
2.5取电导航单元
取电导航单元主要由导航传感器、取电板、磁钉读取器、滤波电缆读取器、安装架组成,如图6所示。取电板的作用是通过与预埋在地表的中频电缆产生电磁感应,从取电板输出交流电为整个小车系统供电。滤波读取器是小车与调度系统沟通的桥梁,它会时刻读取来自预埋在地表的滤波电缆发出的信息,并将信息传递给控制系统。磁钉读写头主要是读取地面磁钉的位置,并将此信息传递给小车的控制系统,控制系统根据此信息能够知道小车的具体位置,从而控制小车的运行。
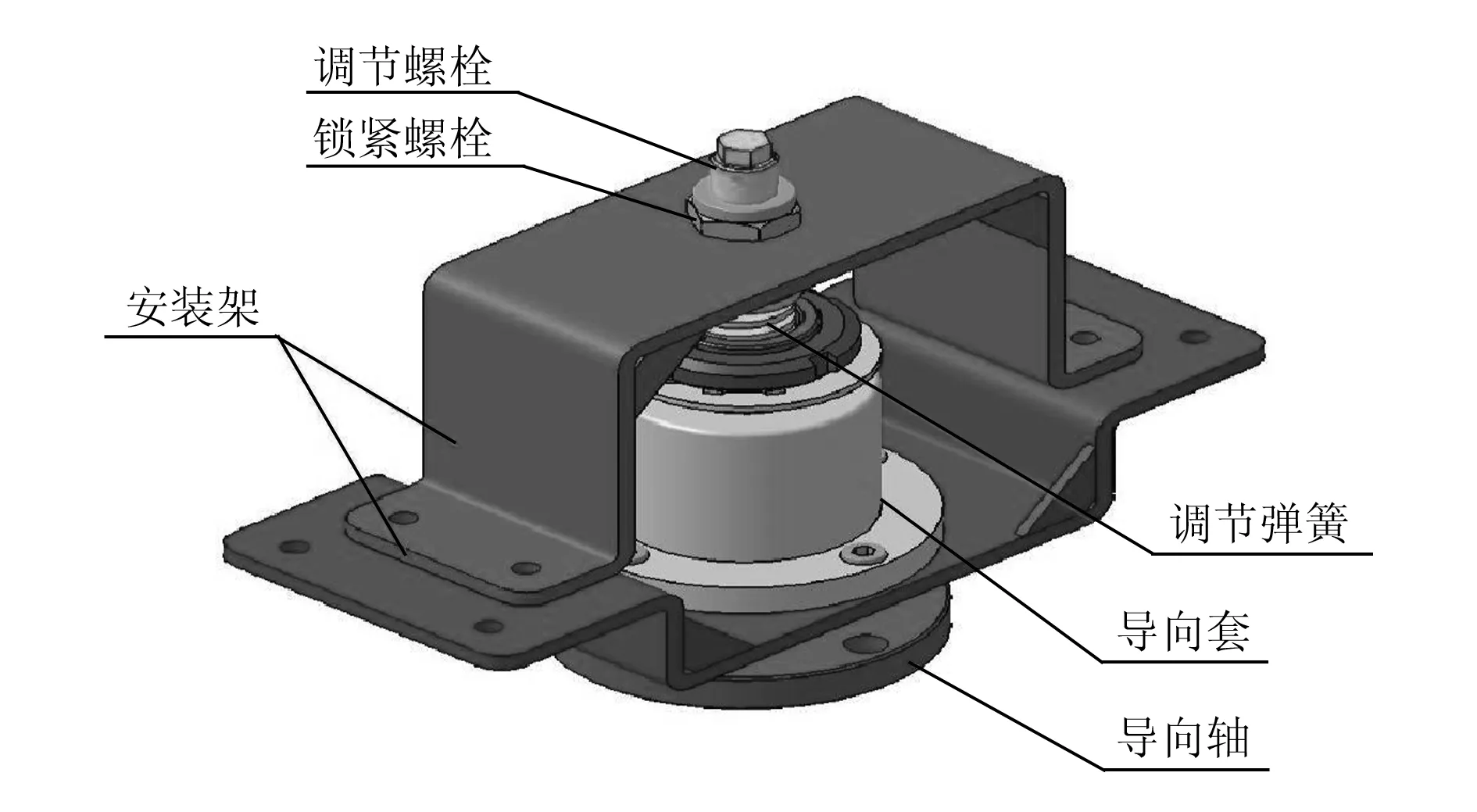
图5 驱动部分调节单元
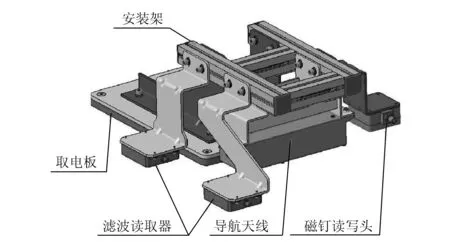
图6 取电导航单元
2.6车体静电释放单元
车体释放单元主要由导电轮、导电轮浮动安装架等组成,如图7所示。车体在运行过程中,导电轮始终与地面紧密接触,将车体运行所产生的静电通过地面的静电涂层释放出去。

图7 车体静电释放单元
2.7清扫刷单元
清扫刷主要是用来清扫AGV行驶路径的螺丝、螺母等杂物,避免AGV 支撑轮或驱动轮直接压到杂物上,造成车轮的损伤,保障 AGV小车的正常行驶,其结构如图8所示。

图8 清扫刷单元
2.8安全防护单元
安全防护单元主要由安全扫描传感器、防碰撞安全边组成,如图9所示。小车在行驶过程中遇到障碍物并进入安全区域后,安全扫描传感器将发出警报,并使小车自动安全停车,当障碍物移除后小车恢复行使。保险杠的作用是当安全扫描传感器失灵时,障碍物碰到保险杠,使小车强制停车,避免更大程度地损害小车。
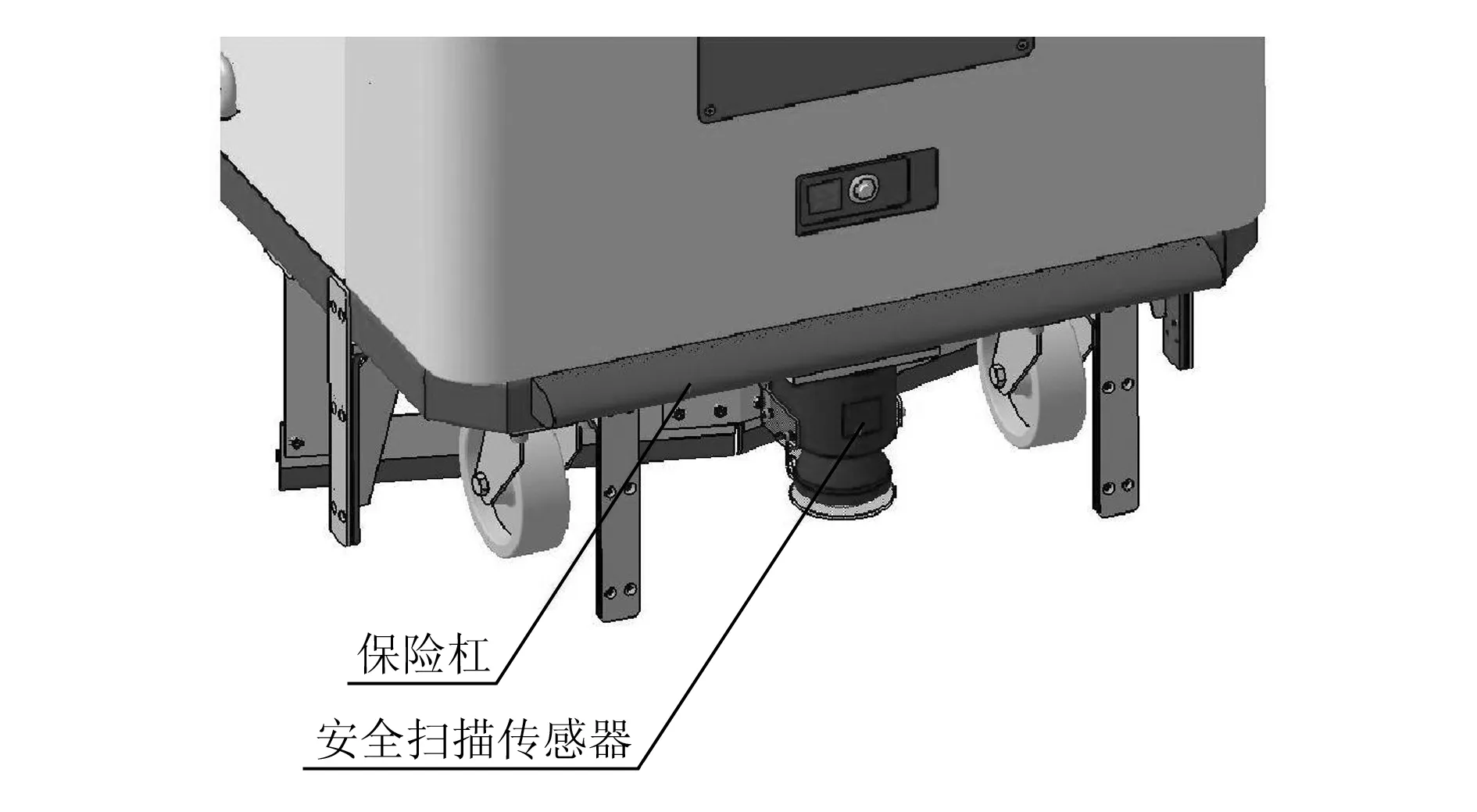
图9 安全防护单元
2.9AGV小车控制单元
AGV小车控制单元主要由以下几部分组成:MOVPRO控制器、无线遥控接收器、控制面板、急停按钮、释放按钮、穆勒灯塔、端子箱组成,如图10所示。MOVPRO控制器是整个AGV小车的控制中心,其控制小车的运行;当AGV 小车调试或维修时,可以使用无线遥控器操作,通过无线接收器接收信息,控制 AGV 小车手动运行;穆勒灯塔可以指示出 AGV 小车的运行状态,正常行驶时绿灯亮,有故障时红灯亮。
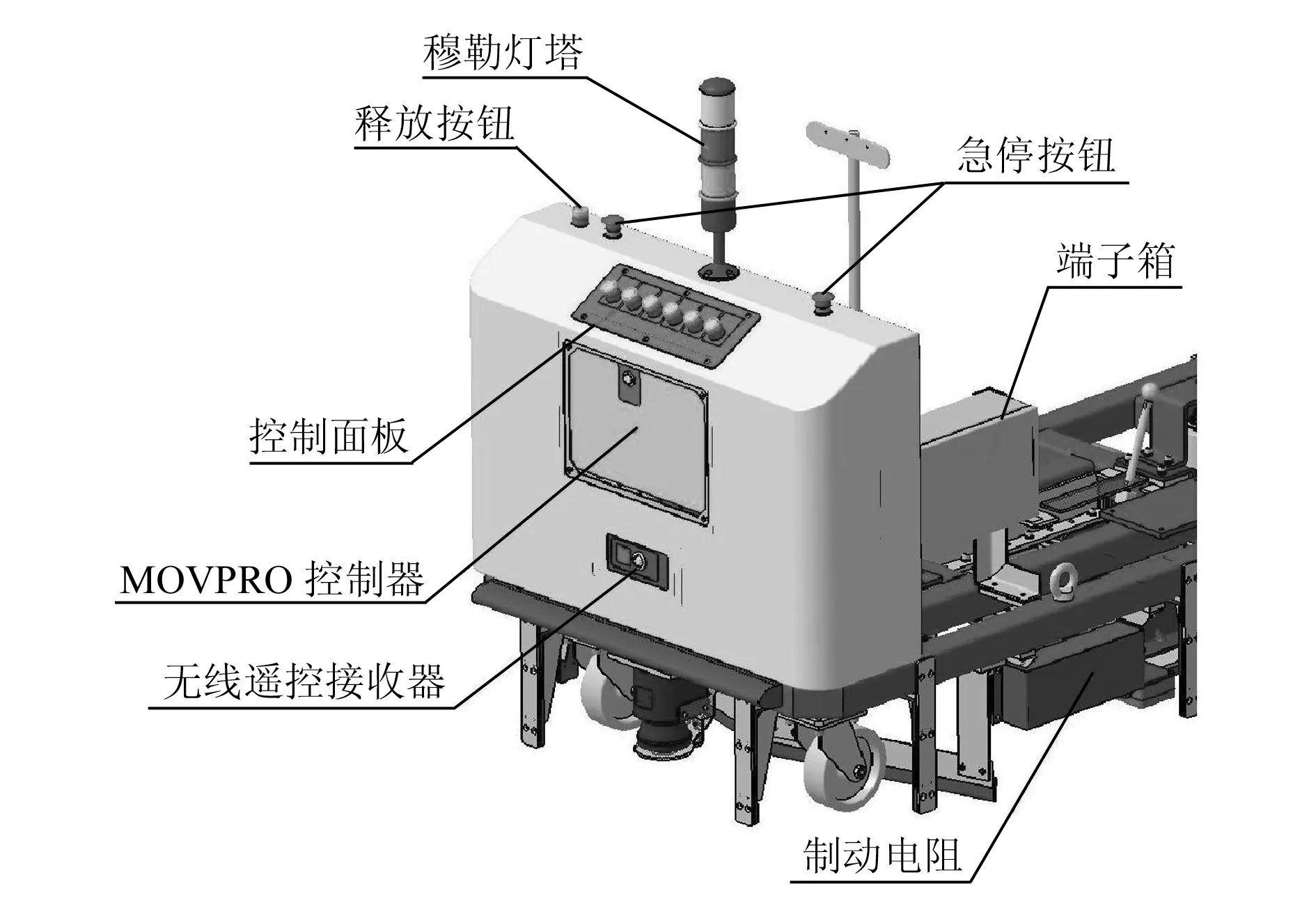
图10 小车控制单元
3 结束语
AGV的机械结构设计是根据其使用者的要求采用不同的结构形式,可增减其中的结构单元,比如本文中的AGV小车是用于生产车间,故增加了清扫单元,而用于港口等物流搬运的AGV,则可视工作环境而设计其他的单元结构。另外,AGV的其他结构单元也可采用不同的结构方式。本文仅为AGV的机械结构设计提供参考和借鉴。
[1] 谷玉川. AGV驱动转向一体化机构及其导航控制研究[D]. 长春:吉林大学,2006.
[2] 陈顺平,梅德庆,陈子辰.激光导引AGV的自动导引系统设计[J].工程设计学报,2003,10(5):279-282.
TheMechanicalDesignoftheFront-endModuleRepackagingAGVforAudi
ZHANG Qingling
(Changchun Vocational and Technical College, Jilin Changchun, 130033, China)
It introduces the mechanical design of the front-end module repackaging AGV for Audi. Taking the design drawings as description, it shows every element of the whole AGV, illustrates the purposes of these elements and structure design.
AGV; Mechanical Structure; Element Design
10.3969/j.issn.2095-509X.2014.04.016
2014-03-25
张庆玲(1971—),女,吉林九台人,长春职业技术学院副教授,主要研究方向为机电设备的机构结构设计。
TH39
A
2095-509X(2014)04-0064-03
