基于Newton-Euler方法的整车非线性动力学模型耦合机理分析
2014-09-01潘劲松
潘劲松
(湖南机电职业技术学院,中国 长沙 410151)
基于Newton-Euler方法的整车非线性动力学模型耦合机理分析
潘劲松*
(湖南机电职业技术学院,中国 长沙 410151)
针对传统的整车动力学模型未能完全反映汽车纵向运动、侧向运动与垂向运动间的相互关联影响,采用Newton-Euler方法,建立一个14-DOF整车非线性耦合动力学模型,并利用Matlab/simulink仿真平台对模型的正确性进行验证,研究结果表明,14-DOF整车非线性耦合动力学模型能较好地反映汽车底盘在制动、转向和悬架等子系统之间相互影响关系.
非线性;耦合;动力学;仿真;Newton-Euler方法
随着汽车技术的发展,人们对汽车性能的要求越来越高,汽车悬架、转向、制动系统的各种动力学模型[1-3]及子系统控制技术[4-6]的研究取得长足的进展.为改善汽车动力性能,改善各个单独子系统之间的相互影响,本文采用Newton-Euler方法,建立了一个14-DOF整车非线性耦合动力学模型.14-DOF整车非线性耦合动力学模型相对于其他模型具有较完备和仿真精确度较高的特点,还具有明显的物理概念和良好的开放性,层次清楚,且可以与随后的集成控制系统的各种模型相结合,能较全面分析底盘的制动、转向和悬架等子系统间的藕合机理、悬挂质量和非悬挂质量的非线性耦合运动关系及子系统间的耦合影响.
1 整车模型的建立
为便于推导,建立的14-DOF整车系统数学模型如图1所示,包含两部分:悬挂质量部分和非悬挂质量部分.定义两个笛卡尔坐标系:①整车车坐标系(xc,yc,zc),汽车质心位置为坐标原点,平面xcyc平行地面,轴zc垂直于平面xcyc,整车左右两侧对称;②悬挂质量坐标系(xs,ys,zs),悬挂质量中心为坐标原点.
假设,Rc为整车质心位置向量,uc为质心纵向运动速度,vc为质心的侧向运动速度,wc为质心的垂向运动速度,得到质心的运动方程为
(1)
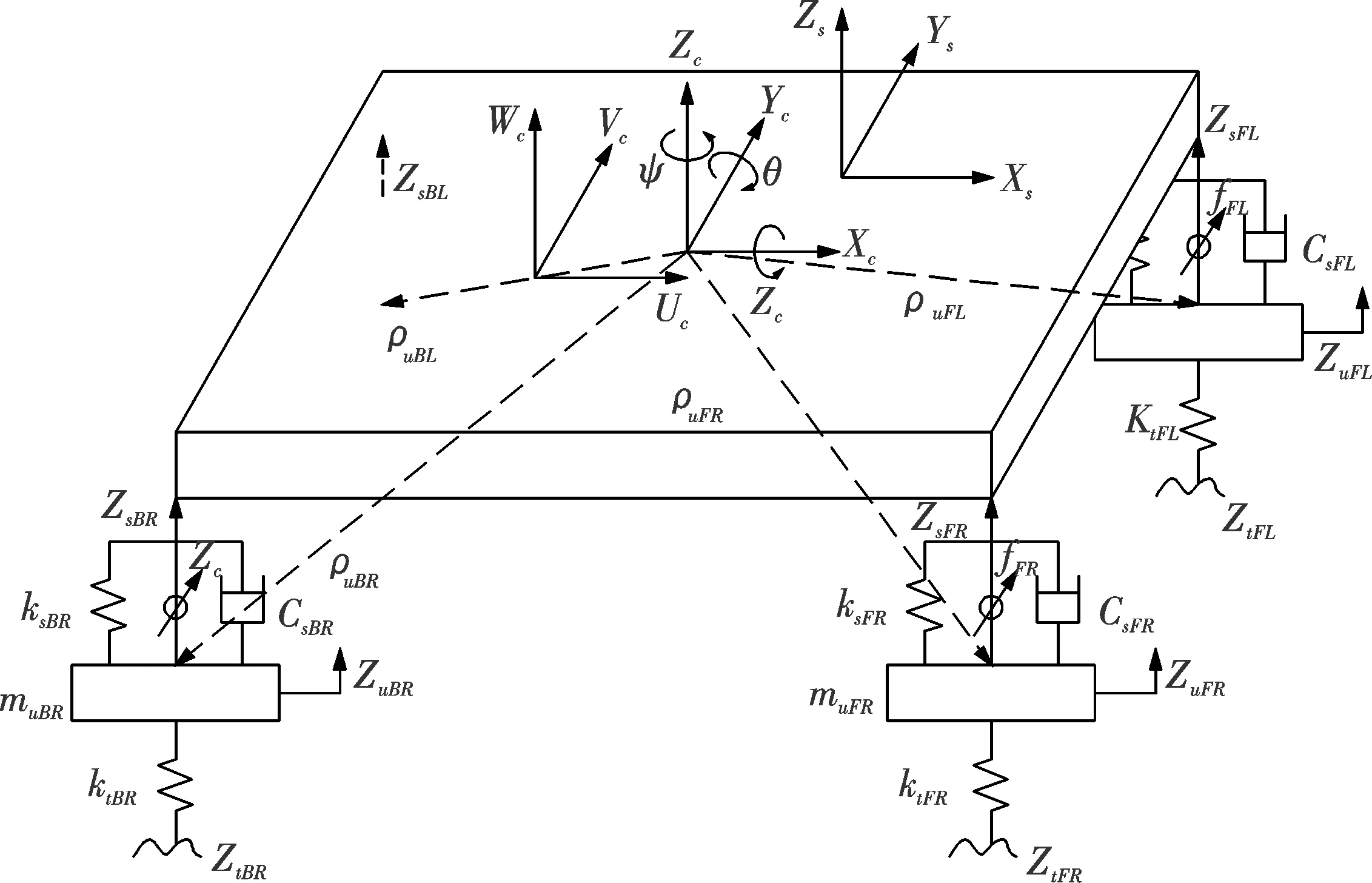
图1 整车系统简化结构图Fig.1 Block diagram of a vehicle

图2 整车质心与悬挂质量质心的位置关系Fig.2 The position relation between vehicle centroid and suspended centroid
又假设,整车质心与悬挂质量质心的位置关系如图2所示,其中悬挂质量位置向量为rs,非悬挂质量质心位置向量为rui,得到悬挂质量和非悬挂质量质心的绝对速度为
(2)

由于整车绕质心轴的角速度、悬挂质量部分绕质心坐标的角速度、非悬挂质量部分绕质心坐标的角速度都相等,所以悬挂、非悬挂质量部分绕各自质心轴的角速度分别为
(3)
其中,p为车身的侧倾角速度,q为车身的俯仰角速度以及,r为汽车横摆角速度.
观察图1和图2中相关变量的位置关系,容易得到汽车悬挂和前后非悬挂质心的位置向量、4个非悬挂质心的位置向量为
(4)
其中,lF,lB为整车质心距前后轴的距离;hF,hB为前、后悬挂质量质心距侧倾轴的垂向距离;dF,dB为前、后轮距的一半;cs为整车质心与悬挂质量在质心的纵向距离;hs为整车质心与悬挂质量在质心的垂向距离.
则悬挂质量和四车轮处的非悬挂质量质心的绝对速度向量分别为:
(5)
对式(5)求导,可得到悬挂质量和非悬挂质量的质心运动加速度矢量分别为
(6)
通过式(6)结合Newton-Euler方法推导出汽车的各个运动相互耦合的非线性微分方程分别为(为便于计算,此处设汽车的纵向速度为常量)
汽车纵向运动方程

(7)
其中,m为整车质量;ms为悬挂质量;δF为转向轮的偏转角度;Fxi为4个车轮所受的纵向力;Fyi为4个车轮所受的侧向力.
汽车侧向运动方程

(8)
汽车垂向运动方程


(9)
其中,ksi为4个悬架的弹簧刚度;csi为4个悬架减振器的阻尼系数;zsi为4个悬挂质量的垂向位移;zui为4个非悬挂质量的垂向位移.
车身侧倾运动方程

ksFL(zsFL-zuFL)dF-ksFR(zsFR-zuFR)dF+ksBL(zsBL-zuBL)dB-ksBR(zsBR-zuBR)dB+
(10)
其中,g为重力加速度值;h为整车质心高度;Ixu为悬挂质量绕整车质心的xc轴惯性矩;Ixzu悬挂质量绕xc,zc轴的惯性积;Iys为悬挂质量绕其质心ys轴的惯性矩;Izs悬挂质量绕其质心zs轴的惯性矩.
整车横摆运动方程

dB(FxBL-FxBR)+lF[-(FxFL+FxFR)sinδF+(FyFL+FyFR)cosδF]-lB(FyBL+FyBR),
(11)
其中,Iz为整车质量对其质心zc轴的惯性矩;Ixs为悬挂质量绕其质心xs轴的惯性矩.
车身俯仰运动方程


(12)
整车非悬挂质量的垂向运动

(13)
其中,mui为整车的4个非悬挂质量;kti为4个轮胎的等效弹簧刚度.
汽车车轮的旋转运动
(14)
其中,Ri为4个轮胎的半径;Iui为4个轮胎的旋转转动惯量;ωi为4个车轮的旋转角速度;Tbi为4个车轮的制动力矩.
数学模型式(7)~式(14)较好地体现了汽车各运动形式之间的相互耦合机理.为进一步研究整车非线性动力学模型中的动态载荷分布的耦合机理,考虑载荷的纵向载荷转移和侧向载荷转移以及与非悬挂质量和悬架参数有关的向心力,得到4个车轮垂直载荷的计算公式为[7]
(15)
其中,Fzi为4个车轮的垂直载荷;L为汽车的轴距;R0为汽车转弯半径;h0为汽车质心到侧倾轴的距离;kφF为汽车前轴当量侧倾刚度;kφB为汽车后轴当量侧倾刚度.
根据汽车纵向、侧向动力学关系,得到4个车轮的侧偏角分别为
(16)
2 模型仿真和整车行驶平顺性仿真分析
在Matlab/simulink下,建立上述动力学模型的仿真模型.该模型包含:汽车沿坐标轴的3种平移运动模块,纵向运动、侧向运动和垂向运动;绕坐标轴的3种旋转运动模块,侧倾运动、俯仰运动和横摆运动;轮胎垂直载荷计算模块;轮胎侧偏角计算模块;路面输入模型[8].路面输入模型采用滤波白噪声,以滤波白噪声作为第一个车轮的路面输入,其他车轮处的路面输入通过轮辙之间的相关性[9]来确定.
某款车整车主要结构参数:m=1 520 kg,ms=1 180 kg,ksi=40/40/35/35 kN/m,kti=220 kN/m,csi=1.4/1.4/1.2/1.2 kN·s/m(i=FL,FR,RL,RR),在Matlab/simulink下进行2种路况仿真,设置仿真步长为10 ms,采用4阶Runge-Kutta方程的ode45算法运算.
整车行驶平顺性主要受到悬架本身的结构参数和汽车在行驶过程中制动与转向等因素影响,而悬架系统的主要性能参数包括车身质心的垂直加速度、悬架动挠度、轮胎动载荷以及车身俯仰角和侧倾角等指标.为此,根据QC/T582-1999和GB/T6323.2-94进行了整车行驶平顺性在2种工况下的仿真.
1) 汽车初始速度为70 km/h时,在最大管路压力下进行紧急制动,分别得到制动情况下轮胎的垂直载荷变化曲线(图3)、车身俯仰角变化曲线(图4)和汽车质心垂向加速度变化曲线(图5).
图3中,汽车制动时轮胎的垂直载荷变化曲线表明前轮垂直载荷增加、后轮垂直载荷减小.图4中,汽车俯仰角曲线变化表明在制动过程中车身的俯仰角增大,说明汽车在紧急制动情况下,制动加速度导致前、后轴的载荷转移和车身姿态发生了较大变化.图5中,车身质心垂向加速度曲线变化表明,紧急制动情况下使得汽车质心垂向加速增加.这表明紧急制动会极大地影响汽车的行驶平顺性.
图6中,由汽车的制动距离变化曲线可见,考虑纵向与垂向运动耦合影响因素的比没有考虑纵向与垂向运动耦合的动力学模型,汽车在制动距离有所减小,原因是汽车制动时由汽车悬架减振器消减了汽车的振动,表现为把汽车的部分动能转化成了热能.
2) 汽车初始速度为50 km/h时,设仿真时间5 s,对方向盘施加一个三角脉冲转角进行转向,分别得到转向情况下轮胎的垂直载荷变化曲线(图7)、汽车侧向加速度变化曲线(图8)和车身侧倾角变化曲线(图9).
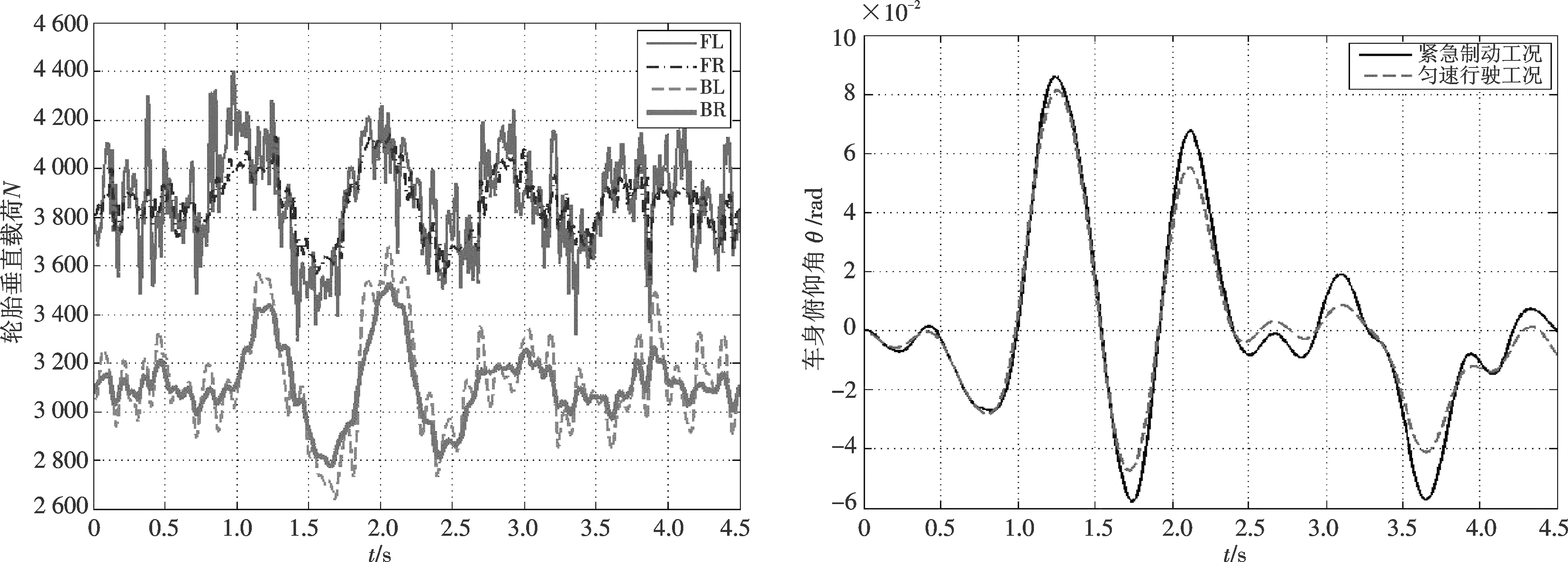
图3 制动时轮胎的垂直载荷 图4 车身俯仰角 Fig.3 Vertical load of tyre when braking Fig.4 Pitching angle

图5 车身质心垂向加速度 图6 制动距离变化曲线 Fig.5 Vertical acceleration of vehicle centroid Fig.6 Braking distance variation curve

图7 转向时轮胎的垂直载荷 图8 转向时车身侧倾角Fig.7 Vertical load tyre when steering Fig.8 Steering roll angle
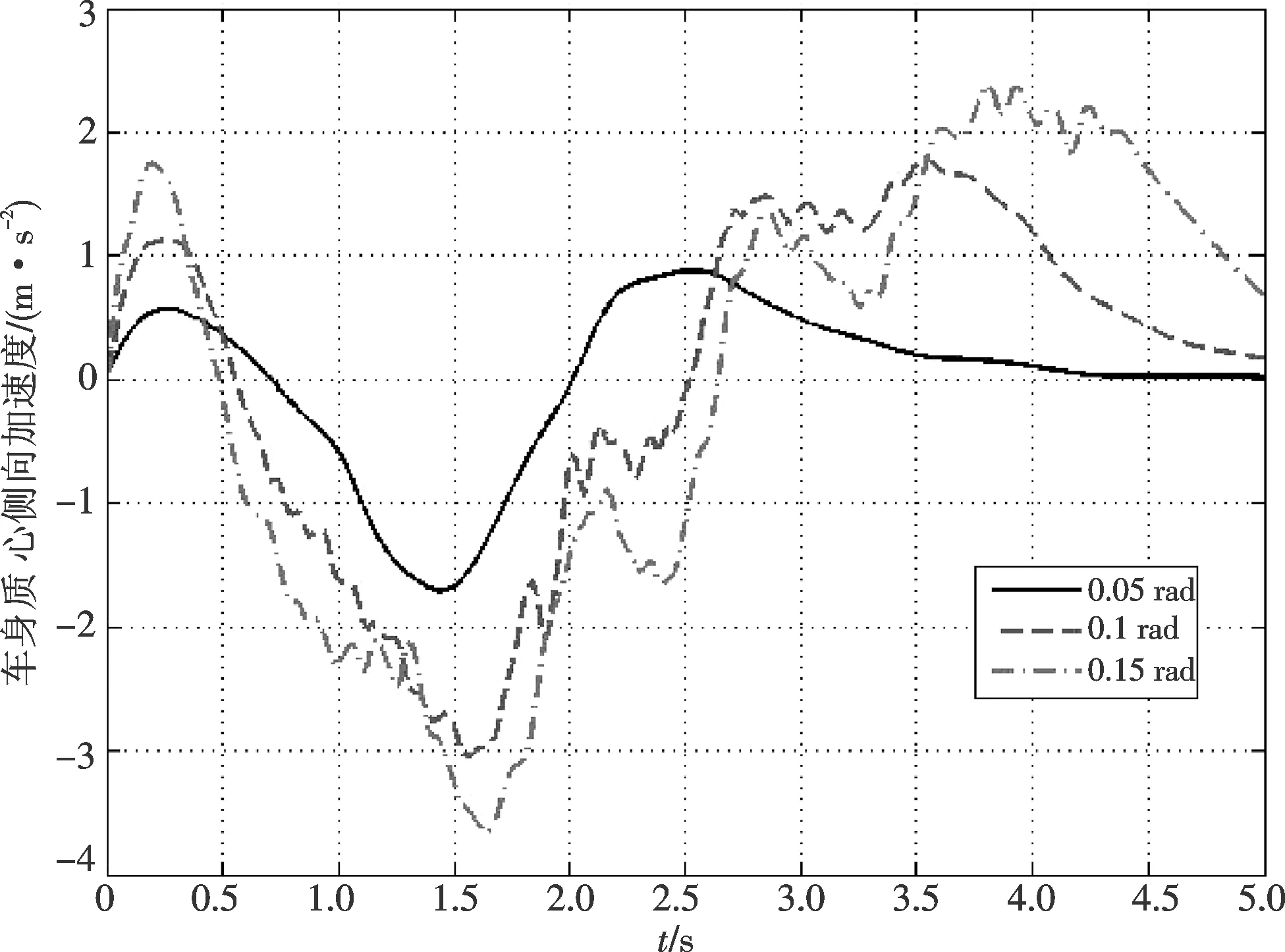
图9 转向时车身质心侧向加速度Fig.9 Vehicle steering centroid roll velocity
图7中,汽车转向时车轮的垂直载荷发生了侧向转移,虽然纵向力的总和基本没变,但转向内侧轮胎垂直载荷减小,同时转向外侧垂直载荷增加.由于作用于轮胎的纵向力与侧向力彼此耦合,作用于轮胎的侧向力增加的同时导致其纵向力减小,转向制动情况比单纯制动情况的制动距离有所增加.图8中,转向过程中轮胎转向角峰值增加时,汽车的车身侧倾角也在变大,导致车身姿态发生变化.图9中,转向角增加时,汽车侧向的加速度也在变大,有时候会导致轮胎发生侧滑.这都表明汽车行驶平顺性在不断恶化,影响了汽车的行驶安全性.
3 结论
基于Newton-Euler方法建立的14-DOF整车非线性耦合动力学模型能较好地反映纵向、侧向和垂向运动相互的影响,通过在Matlab/simulink平台对模型进行仿真验证,结果表明,建立的动力学模型能较好地反映底盘的制动、转向和悬架等子系统之间的相互影响关系.
[1] SATO Y, EJIRI A, IIDA Y,etal. Micro-G Emulation system using constant tension suspension for a space manipulator[C]. Proceedings of the 1991 IEEE International Conference on Robotics and Automation Sacramento. California, 1991.
[2] 姚燕生,梅 涛.悬架模块的动力学建模与仿真[J].机械工程学报, 2006,42(7):30-34.
[3] LIAO Y G, DU H I. Modeling and analysis of electric power steering system and its effect on vehicle dynamic behavior [J]. IJVAS, 2003,1(3):351-362.
[4] IKENAGA S, LEWIS F L, CAMPOS J,etal. Active suspension control of ground vehicle based on a full vehicle model [C]. Proceedings of the American Control Conference Chicago, Illinois, June, 2000.
[5] BYUNG R L, KYU H S. Slip-ratio control of ABS using sliding mode control[J]. SMAEUU, 1993,1(2):72-77.
[6] SEGAWA M, NAKANO S, NISHIBARA O,etal. Vehicle stability control strategy for steer by wire system [J]. JSAE Review, 2001,22(4):383-388.
[7] 祝 辉.基于磁流变减振器的汽车底盘集成控制研究[D].安徽:合肥工业大学, 2009.
[8] 陈萌三,余 强.汽车动力学[M].北京:清华大学出版社, 2009.
[9] 杨谋存.半主动悬架系统设计与车辆性能协调研究[D].镇江:江苏大学, 2004.
[10] 吴利军,王建强.汽车驾驶辅助实时仿真系统的整车动力学模型[J].农业机械学报, 2008,10(10):14-29.
(编辑 陈笑梅)
The Coupling Mechanism Analysis of Vehicle Nonlinear Dynamical Model Based on Newton-Euler Method
PANJin-song*
(Hunan Mechanical and Electrical Polytechnic, Changsha 410151, China)
To overcome the ineffectiveness of the traditional vehicle dynamical model in reflecting the interaction between the vehicle longitudinal movement, lateral movement and vertical movement, a 14-DOF vehicle nonlinear coupling dynamical model was established by using the Newton-Euler method, whose validity was verified by using Matlab/simulink simulation platform. The results show that the establishment of the 14-DOF vehicle nonlinear coupling dynamical model better reflects the interaltion between the chassis braking, steering and suspension subsystems.
nonlinear; dynamics; coupling; simulation; Newton-Euler method
2014-07-16
湖南省科学技术厅科技计划资助项目(2011FJ3130);湖南省教育厅科研资助项目(10C0155)
*
,E-mail:pjs196855@126.com
U462.3;O29
A
1000-2537(2014)06-0047-06
