在卫星飞轮上采用机械变频的动力吸振技术
2014-08-31黄俊杰周徐斌申军烽虞自飞
黄俊杰,周徐斌,申军烽,虞自飞
(上海卫星工程研究所 空间机热一体化技术实验室,上海200240)
在卫星飞轮上采用机械变频的动力吸振技术
黄俊杰,周徐斌,申军烽,虞自飞
(上海卫星工程研究所 空间机热一体化技术实验室,上海200240)
为拓宽动力吸振器的工作频带,以满足卫星飞轮振动控制的需求,提出了一种新型的基于机械变频技术的动力吸振器结构,对该变型结构的工作原理进行理论分析和实验研究后表明,机械变频装置的引入,可以有效地将动力吸振器的工作频带拓宽到20 Hz。由此,能够有效抑制飞轮安装板的对于飞轮振动的响应幅值,频率调节范围增大;而且结构紧凑,可靠性高。这一改进的动力吸振技术为卫星飞轮振动控制提供了新的研究方法。
振动与波;变频动力吸振器;振动分析;飞轮振动;机械变频
飞轮振动是诱发卫星平台微振动,影响卫星敏感载荷性能指标的主要因素[1—3]。传统的飞轮减振技术有阻尼减振[4,5]、结构刚化[6]、隔振[7]等等。动力吸振器是工程上常用的减振设备。文献[8,9]分析了被动式动力吸振器对飞轮振动的抑制效果,提出了基于自适应遗传算法的被动式动力吸振器最优参数设计方法。但是被动式动力吸振器的吸振频带较窄,无法满足飞轮振动控制的需求。
为拓展动力吸振器的吸振频带,文献[10]提出了离散分布式动力吸振器,但该方法对频带的拓展较小(5 Hz左右)。文献[11~14]分别利用空气弹簧、电磁弹簧、压电陶瓷和磁流变弹性体设计了参数可调的动力吸振器,但由于能耗大、响应慢等因素,尚不适合工程应用。文献[15]提出一种机械自调谐式动力吸振器,较大地拓宽了动力吸振器的工作频带。但该吸振器的振型不纯,易发生侧向摆动,可靠性较差。
本文提出了一种新型的基于机械变频技术的动力吸振器。该变频动力吸振器能够有效抑制飞轮安装板的对于飞轮振动的响应幅值,频率调节范围大,结构紧凑,可靠性高。
1 变频动力吸振器的理论分析
图1为变频动力吸振系统示意图。图中的ms、ks、cs、xs分别为主结构的质量、刚度、阻尼和位移,md、kd、cd、xd分别为吸振器的动质量、刚度、阻尼和位移。f表示飞轮由于偏心转动而作用在主结构竖直方向上的简谐激振力,设f=meω2sin ωt。这是一个两自由度受迫振动系统,系统的微分方程为
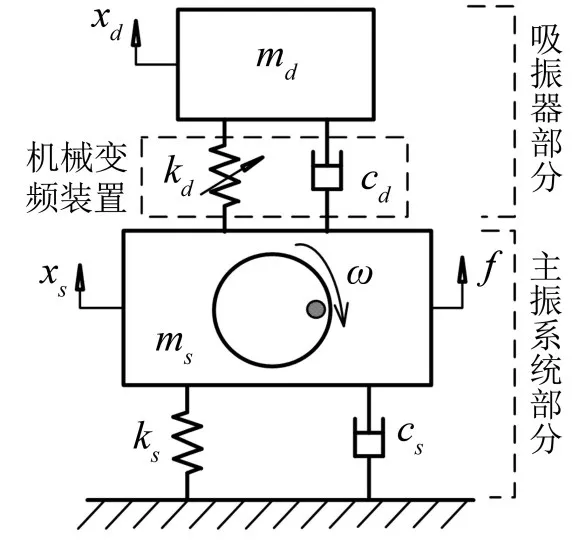
图1 基于机械变频技术的动力吸振系统示意图

采用复量表示法进行演算,可以得到主结构稳态振幅为

图2为定频动力吸振器对主结构的振动抑制效果图。从图中可以看出,当吸振器固有频率ωd与激振频率ω相等时,主结构的对飞轮扰动的稳态响应幅值最小。对式(2)求极小值,也可以得出相应结论。
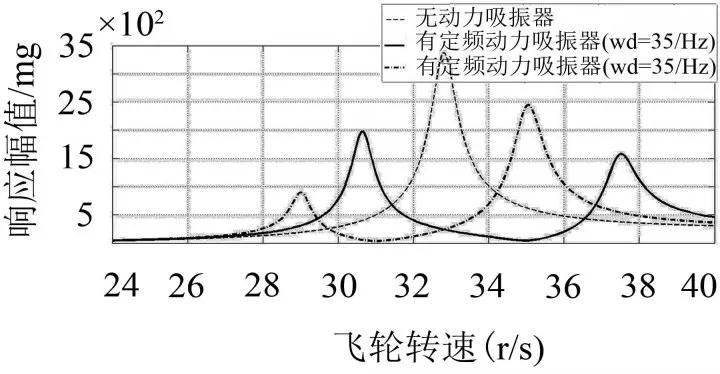
图2 定频动力吸振器的减振曲线
变频动力吸振器通过调整吸振器的固有频率ωd,使之与飞轮扰动频率ω相等,进而使飞轮安装板始终保持低幅振动的状态。在式(2)中,令α=λ,得到理想变频动力吸振器作用下主结构的稳态相应幅值为

理想的变频动力吸振曲线是其变频范围内各ωd的最佳减振点的连线,如图3所示。
当ζdζdλ<1时,有,即变频动力吸振器的减振效果随则ζd的增大而减弱。因此在设计变频动力吸振器的时候,要减小不必要的能量耗散(选取阻尼较小的弹性材料,减小摩擦与冲击等),保持较高的减振效果。
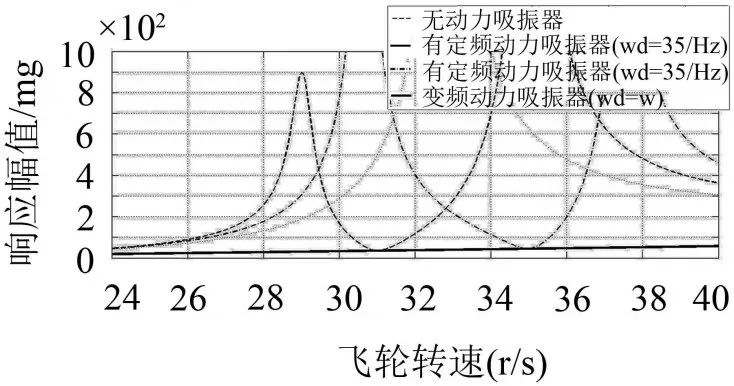
图3 理想变频动力吸振器减振曲线
2 变频动力吸振器的结构设计
2.1 机械变频装置
本文采用的机械变频装置如图4所示。该结构由两个平移滑块,两根拉压弹簧、一根导杆、直线轴承和动质量块组成。两弹簧的一端与直线轴承铰接,另一端分别与左、右滑块铰接。动质量块与直线轴承固接在一起。
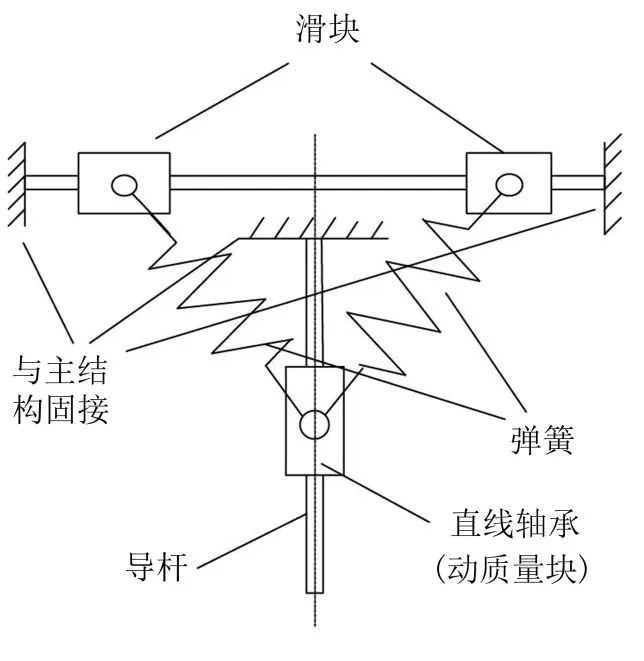
图4 机械变频装置构型简图
在动质量块上作用力F,动质量块在垂向产生位移Δh。设弹簧初始长度为l0,拉伸刚度为k0,弹簧两端跨距为s。在小变形情况下,该结构的垂向等效刚度为
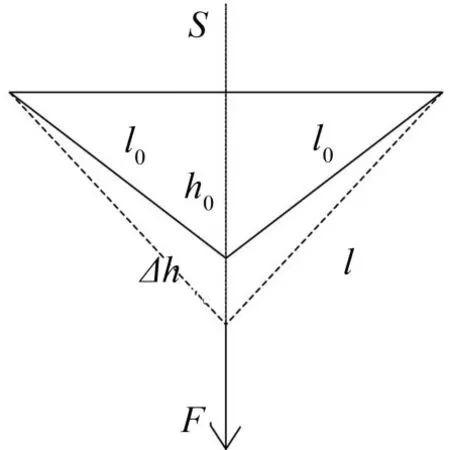
图5 机械变频装置受力分析简图

动质量块和直线轴承的质量之和为变频动力吸振器的动质量md。该结构的固有频率为

对式(5)进行求导,得到
可以看出,该结构的固有频率随着弹簧跨距的增呈加速下降的趋势。因此,可以通过调整弹簧的跨距来改变吸振器结构的固有频率。

2.2 弹性元件设计
半圆形的片弹簧具有较高的侧向刚度、扭转刚度且拉伸线性度较好[15],可以避免动质量块出现侧摆或者扭转现象。因此,本文采用半圆形片弹簧作为机械变频装置的弹性元件。为了方便片弹簧的加工与装配,设计了刚性转接件。
图6为片弹簧的结构示意图。设弹簧的半径为R,截面惯性矩为I,材料的杨氏模量为E。转接件的高度为b。利用卡式定理进行小位移变形分析,可以得到该片弹簧的零位拉压刚度为


图6 片弹簧结构示意图
为保证元件的弹性和抗疲劳能力,本文选用65 Mn钢片作为加工原料,钢片退火后弯制成形,再进行淬火和中温回火以提高材料的屈服强度和弹性极限。
2.3 变频动力吸振器原理样机
图7是变频动力吸振器原理样机。该动力吸振器由底板、导杆、直线模组(即丝杠螺母副)、片弹簧、动质量块、直线轴承、电机及其控制系统以及相关转接元件等组成。
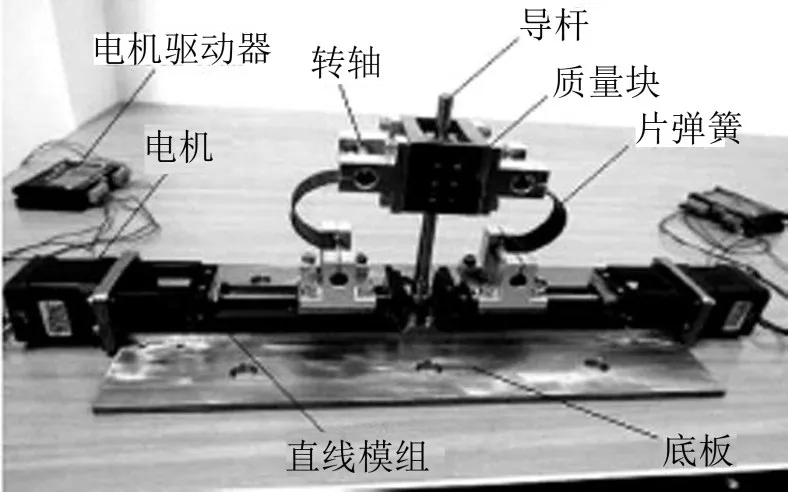
图7 基于机械变频技术的动力吸振器原理样机
如图8所示,该变频动力吸振器采用开环控制:工作室,将发给飞轮的速度指令转发给机械变频装置的控制器。控制器通过数位表得到相应条件下电机相应的转动步数,给左右两台电机发出相同指令;电机驱动丝杠转动,调节片弹簧跨距s至相应值,达到最佳减振效果。
该变频动力吸振器结构设计有如下特点:
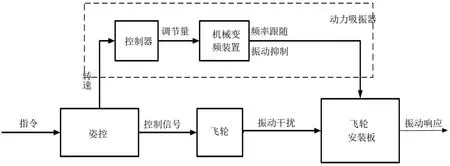
图8 基于机械变频技术的动力吸振系统框图
1)阻尼小:铰接处加装滚动轴承,减小摩擦,提高减振性能;
2)装配方便:采用转接件连接片弹簧,方便安装与拆卸;
3)可靠性高:选用精密丝杠+步进电机组合,保证频率调节的精度,降低了控制的复杂性,提高了系统可靠性。
3 减振性能实验研究
3.1 频率调节性能实验研究
为了测试变频动力吸振器的频率调节性能,搭建如图9所示的模态测试平台。在不同的片弹簧跨距的条件下,测试变频动力吸振器的固有频率。
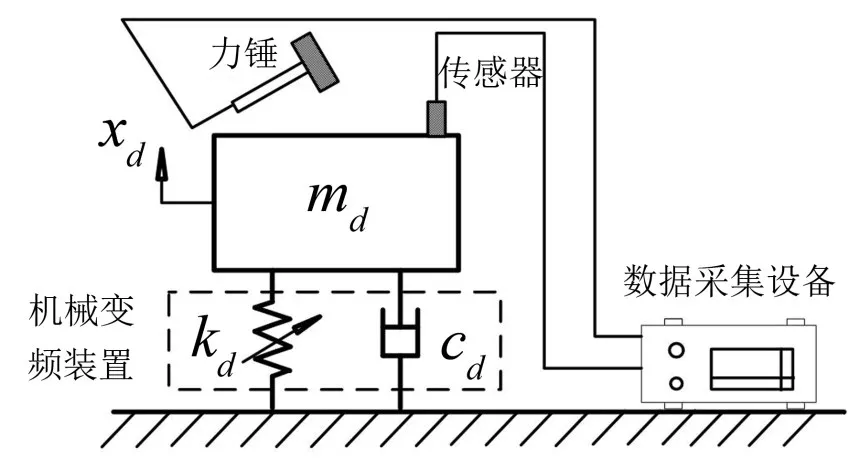
图9 频率调节性能实验
图10变频动力吸振器的频率调节性能曲线,图中的虚线为根据式(5)计算得到的理论曲线,实线为实测数据点的连线。从实验数据可以看出,该变频动力吸振器固有频率变化范围达到了20 Hz,且随片弹簧跨度的增加呈加速下降的趋势,这与理论计算得到的结论是一致的。因此,可用公式(5)为模型,引入修正系数,利用实测数据进行曲线拟和,作为该变频动力吸振器的控制表。
3.2 减振性能试验研究
为了研究吸振器的减振性能,搭建如图10所示的减振性能实验平台。平台采用两端固支梁结构,结构一阶固有频率为29.5 Hz。采用伺服电机带动偏心惯量盘转动模拟振源。
在24 Hz~40 Hz的激励下,分别测试无动力吸振器、单频动力吸振器(跨距固定)和变频动力吸振器的作用下,固支梁中心点垂向加速度响应幅值。实验结果如图11所示。
从图11可见,定频动力吸振器可以改变系统模态,将原有的共振峰抑制住,但在共振频率前后出现两个新的共振峰。当激励频率和定频动力吸振器的固有频率相等时,固支梁的加速度响应量级最小。而变频动力吸振器则在其频率变化范围内,将固支梁中点的加速度响应幅值抑制在相对稳定的较低水平(100 mg以下)。
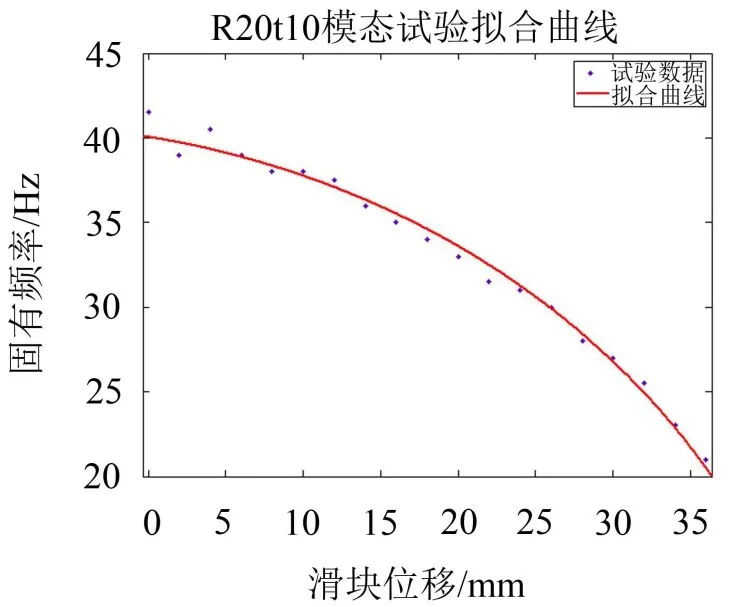
图10 跨距=频率曲线
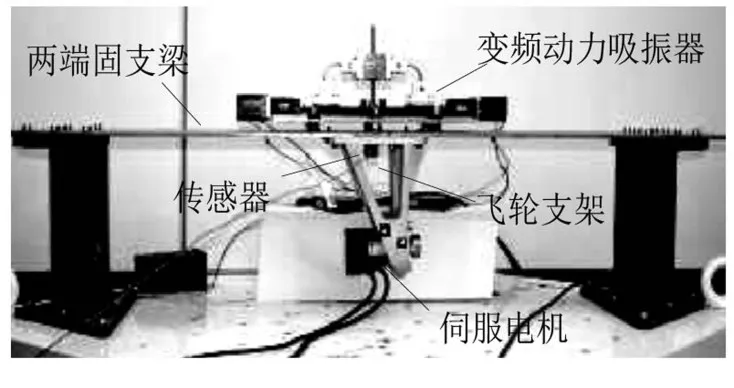
图10 减振性能实验平台
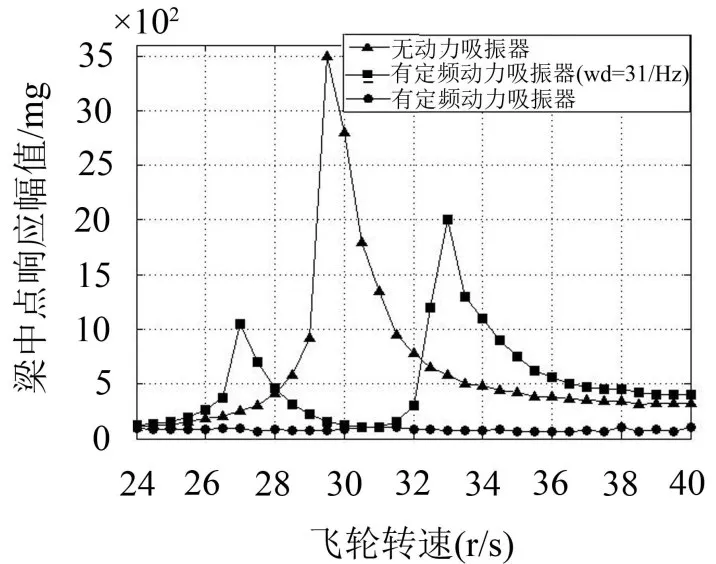
图11 变频动力吸振器减振效果试验曲线
由此可见,机械变频装置的引入,大大拓宽了动力吸振器的有效吸振频带,使得变频吸振器在其频率变化范围内,可以最大限度地降低飞轮安装板的振动量级。
4 结语
经过理论和实验研究,可以得到如下结论:
(1)当动力吸振器的固有频率和外界对主结构的激励频率相等时,动力吸振器可将主结构的振动响应量级抑制在最低水平;
(2)机械变频装置的固有频率随着片弹簧跨距的增大呈加速下降的趋势。可以通过控制片弹簧的跨度来精确控制变频动力吸振器的固有频率;
(3)机械变频装置的应用,大大拓宽了动力吸振器的有效吸振频带,使得变频吸振器在其频率变化范围内,可以最大限度地降低飞轮安装板的振动量级。
[1]LIU Kuo-chia,Peiman Magham i.Reaction wheel disturbance modeling,jitter analysis,and validation tests for solar dynam ics observatory[J].AIAA Guidance, Navigation and Control Conference,2008,18-21.
[2]Scott E.M iller,Paul Krichman,John Sudey.Reaction wheel operational impacts on the GOES-N jitter environment[J].AIAA Guidance,Navigation and Control Conference,2007,20-23.
[3]蒋国伟,周徐斌,申军烽,等.卫星微振动虚拟仿真技术研究及应用[J].计算机测量与控制,2011,19(9).
[4]A llen J.Bronow icki.Vibration isolator for large space telescopes[J].45 th AIAA/ASME/AHS/ASC Structures, Structural Dynamics&Materials Confer,2004,19-22.
[5]徐 超,田 伟.卫星飞轮安装支架的粘弹性阻尼减振设计,动力吸振器在飞轮振动控制中的参数分析[J].噪声与振动控制,2010,30(3):1-4.
[6]刘天雄,范本尧,杨 慧.卫星飞轮扰振控制技术[J].航天器工程,2009,18(1):53-60.
[7]Hyun-Ung Oh,Shigemune Taniwaki.Flywheel vibration isolation test using a variable-damping isolator[J].Smart Mater.Struct,2006,365-370.
[8]虞自飞,孔祥森,沈海军,等.动力吸振器在飞轮振动控制中的参数分析[J].噪声与振动控制,2013,33(4):5-10.
[9]虞自飞,王 涛,沈海军,等,动力吸振器在飞轮振动控制中的应用[J].噪声与振动控制,2013,33(5):173-178.
[10]吴崇健,骆东平,杨叔子,等.离散分布式动力吸振器的设计及在船舶工程中的应用[J].振动工程学报,1999,12(4):584-589.
[11]靳晓雄,肖 勇,蔺玉辉,等.空气弹簧半主动式吸振器的研究[J].中国工程机械学报,2007,5(3):253-257.
[12]赵国迁.电磁式半主动吸振器研制及其在汽车振动控制中的应用[D].哈尔滨:哈尔滨工程大学,2007.
[13]Benello P,Brennan M J,E lliott S J.Vibration control using an adaptive tuned vibration absorber w ith a variable curvature stiffness element[J].Smart Materials and Structures,2005,14(5):1055-1065.
[14]Deng H K,Gong X L,Wang L H.Development of an adaptive tuned vibration absorber w ith magnetorheological elastomer[J].Smart Materials and Structures,2006,15(5):N111-N116.
[15]徐振邦,龚兴龙,陈现敏,等.机械自调谐式动力吸振器的研究[J].中国机械工程,2009(09):52-57.
Application of Tunable Vibration Absorber to Satellite’s Flywheels Based on Mechanical Tuning Technology
HUANG Jun-jie,ZHOU Xu-bin,SHEN Jun-feng,YU Zi-fei
(Laboratory of Space Mechanical and Thermal Integrative Techology, Shanghai Institute of Satellite Engineer,Shanghai 200240,China)
In order to extend the vibration absorber’s bandw idth and meet the requirement of vibration control for satellite flywheels,a new kind of tunable dynam ic vibration absorbers based on mechanical tuning technology is presented.Its working principle is briefly introduced.Theoretical analysis and experimental study show that the mechanical tuning device can effectively extend the dynam ic vibration absorber’s bandw idth to about 20 Hz.This research of tunable dynam ic vibration absorbing technology provides a new method for satellite flywheel’s vibration control.
vibration and wave;tunable dynamic vibration absorber;vibration analysis;flywheel vibration; mechanical tuning
1006-1355(2014)04-0083-05
TB53;TB535.1 < class="emphasis_bold">文献标识码:A DOI编码:
10.3969/j.issn.1006-1335.2014.04.018
2013-10-07
黄俊杰(1988-),男,福建漳州人,中国航天科技集团第八研究院在读研究生,主要从事卫星结构设计与仿真。
E-mail:nianyounian@qq.com。
