基于PSoC的无人地效飞行器高度检测系统设计
2014-08-23邓新禹
邓新禹,王 琪
(南昌航空大学信息工程学院,江西 南昌 330063)
0 引言
无人地效飞行器(Unmanned Ground Effect Vehicle),是一种利用地面效应原理,具有超低空飞行能力的特种飞行器。它是一种新型的在水(或地)面低空飞行的高速运输工具,介于飞机、舰船和气垫船之间,既可以离开水(或地)面又可贴近水(或地)面飞行[1]。无人地效飞行器可以在地效段利用地面效应飞行以减少燃油消耗,提高有效载重系数,增加航程[2]。但是在遇到突发情况或海(地)面飞行条件恶劣时无人地效飞行器必须掠海(地)高飞以避开障碍物和海浪。因此,无人地效飞行器在飞行过程特别是在地效段低空飞行时对飞行高度的检测有严格要求。普通的超声测距模块的测量范围一般在30cm~800cm之间,存在小于30cm区域的测量盲区,而红外测距传感器的测量范围较短,在80cm以内。组合测距系统可以在一定程度内弥补超声和红外测距各自的不足[3],也可为飞行器避障提供参考,为飞行器飞控系统提供安全可靠的高度数据。
1 系统总体框架
基于PSoC的无人地效飞行器高度检测系统的硬件部分主要包括超声测距、红外测距、数据融合3个部分。测距系统按照测量高度分为3个阶段:(1)当飞行器飞行高度处于70cm~150cm时,仅超声波测距数据有效;(2)当飞行器飞行高度处于30cm~70cm时,采用超声波和红外组合测距;(3)当飞行器飞行高度处于30cm以下时,仅红外测距数据有效。飞行器起飞后,在飞控系统控制下飞行高度逐渐降低,超声波测距模块开启并选择飞行器所处飞行阶段,判断高度检测方式,各传感器将采集数据发送至PSoC(数据融合模块),PSoC对对应传感器参数进行处理,计算并进行数据融合,再将高度参数通过UART发送至飞控系统,飞控中心控制飞行器姿态、俯仰、舵机,从而对飞行器稳定性进行控制。无人地效飞行器高度检测系统总体框架如图1所示。
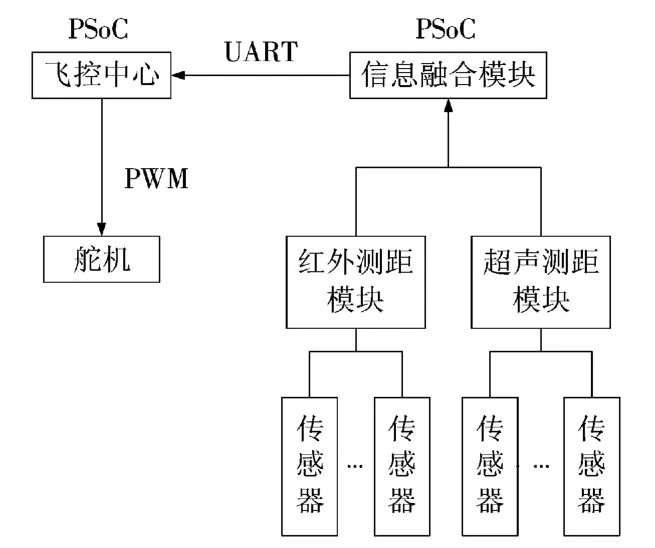
图1 系统总体框架
2 组合测距模块及硬件设计
2.1 超声波测距原理及硬件设计
根据超声波发射后回波的振幅、相位,超声波发出至返回的时间差,超声波测距方法分为幅值检测法、相位检测法和渡越时间法[4]。本文采用渡越时间法进行高度检测,当超声波传感器发射的声波遇到地(海)面反射后被接收器接收,通过测量声波发射到接收的时间差,利用公式(1)可计算出飞行器与地(海)面间的高度差l:

式(1)中:c为超声波在空气中的传播速度,t为声波在空气中的传播时间,τ为环境温度。本系统不考虑温度对声波在空气中传播速度的影响,所以公式可简化为公式(2):

超声波发射电路采用方波发生器产生方波信号激发压电换能器发射超声波,本设计采用NE555D为核心搭建超声波发射电路。555时基电路工作电压5V~15V,其中3脚为输出端,4脚为复位端。当4脚为低电平时,3脚输出也为低电平;当555输出方波信号时,4脚为高电平或者悬空。超声波发射电路硬件图如图2所示。
超声波接收电路采用红外检波专业芯片CX20106A,其调制频率在 38kHz左右,与超声波40kHz频率相近。换能器接收到回波信号后,经过CX20106A芯片放大、选频、整形后触发PSoC中断计算超声波在空气中的传播时间t。超声接收电路硬件图如图3所示。
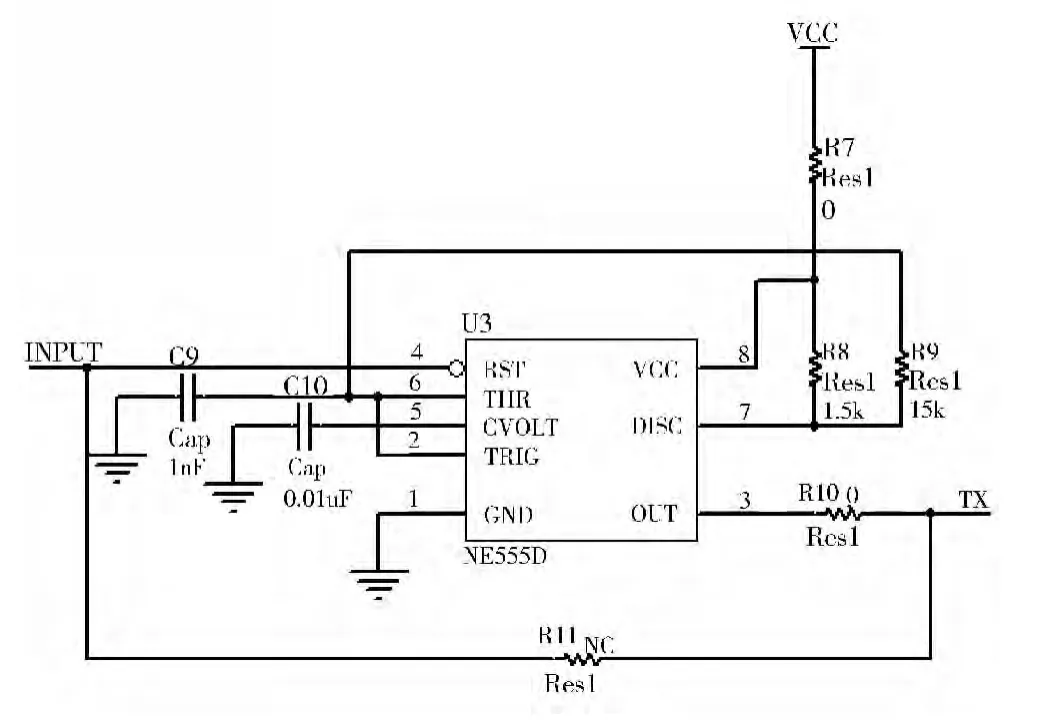
图2 超声波发射电路
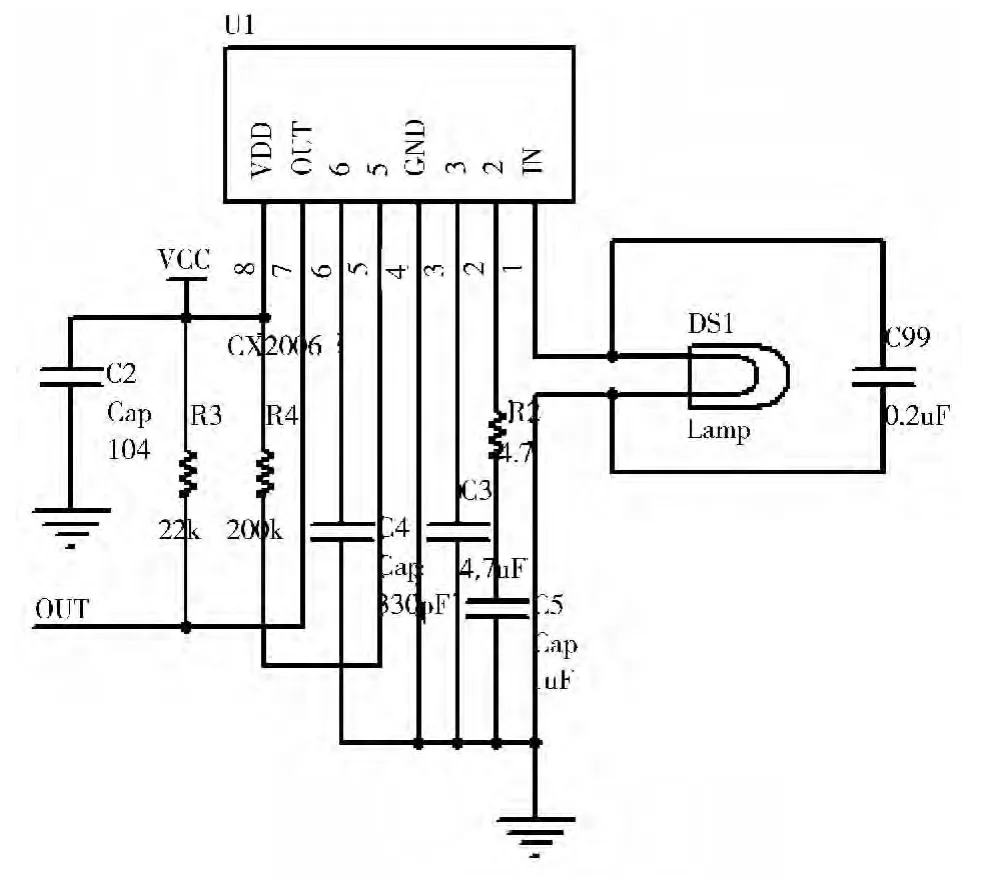
图3 超声波接收电路
2.2 红外测距原理及测距传感器
本设计采用SHARP GP2D12专业红外测距传感器,其工作电压4.5V ~5.5V,刷新周期 40Hz,测量范围10cm~80cm,采用模拟信号输出方式。GP2D12内部由一个红外发射管和一个PSD(位置敏感检测装置)以及其相应的计算电路组成。
GP2D12利用三角测量原理实现对高度的测量,测量示意图如图4所示。红外发射管发射光束,在遇到障碍物后,光束反射到光感应板上并产生一个偏移量,同时形成一个三角关系。再利用平面几何原理,在发射角α、光感应板与红外发射管位置间距离X、滤镜焦距f固定且已知的情况下,可利用公式(3)计算出传感器到物体的间距D:

GP2D12只有3个引脚:VCC、GND、数据传输线。硬件连接时直接将GP2D12接入PSoC的AD口。在使用时将传感器放置于机头内部10cm处,以消除测量盲区;因为输出信号与距离为非线性关系,需要软件进行线性化处理。
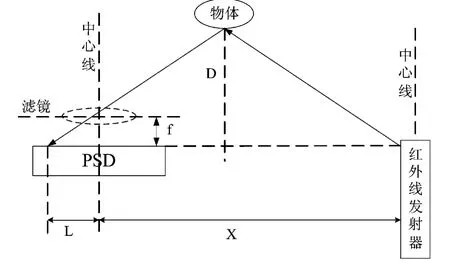
图4 三角测量原理
3 数据融合原理及运算流程
文献[5]对多传感器自适应加权平均融合估计算法进行了详细研究,文献[6]在其基础上提出了基于SMBus总线的移动机器人多传感器信息融合测距系统设计,本设计结合上述文献设计无人地效飞行器多传感器高度检测的数据融合。
无人地效飞行器多传感器高度检测的数据融合运算流程:
(1)利用式(4)和式(5)递推地算出采样时刻Rpp(k)和Rpq(k)。其中Rpp(k)为时刻k超声波传感器的自协方差;Rpq(k)为时刻k超声传感器p和红外传感器q的互协方差;Xp(i)为超声传感器在i时刻的测量值;Xq(i)为红外传感器在i时刻的测量值。

(2)利用式(6)求出时刻k的Rpq。其中Rpq(k)为时刻k的互协方差的均值(k)作为Rpq的估计值。

(3)利用式(7)求出时刻k的。其中σp为时刻k超声波传感器p的方差;Vp为真值与测量值的误差。

根据式(8)计算出各个传感器时刻k的均值。其中(k)为时刻k超声波传感器的均值。同理可得红外传感器在时刻k的均值(k)。

(4)根据式(9)求出此时刻各传感器的最优加权因子。其中为各个超声传感器时刻k的最优加权因子。同理可得红外传感器在时刻k的最优加权因子。

(5)根据式(10)求出此时刻的估计值。

4 实验结果与分析
本设计高度检测按飞行器所处高度不同分为3个阶段:(1)当飞行器飞行高度处于70cm~150cm时,处于超声波测距阶段;(2)当飞行器飞行高度处于30cm~70cm时,采用超声波和红外组合测距;(3)当飞行器飞行高度处于30cm以下时,处于红外测距阶段。故当处于超声检测阶段时红外检测权值为0,当处于红外检测阶段时超声检测权值为0。采用组合测距段高度数据为40cm和60cm处为标定距离,红外、超声传感器各采集10个有效数据。40cm标定时,红外传感器数据为:39.6,39.8,40.5,39.8,41.1,40.9,40.5,40.2,39.9,40.5;超声检测模块数据为:39.6,40.0,40.1,38.8,40.1,40.5,40.1,39.5,39.3,40.0。60cm 标定时,红外传感器数据为:60.0,60.2,60.5,61.0,58.7,59.2,59.5,60.3,59.2,59.3;超声检测模块数据为:60.5,60.8,60.9,61.6,59.5,60.1,60.3,60.7,59.8,59.9。由以上数据结合自适应加权平均数数据融合算法可得出表1所示数据。
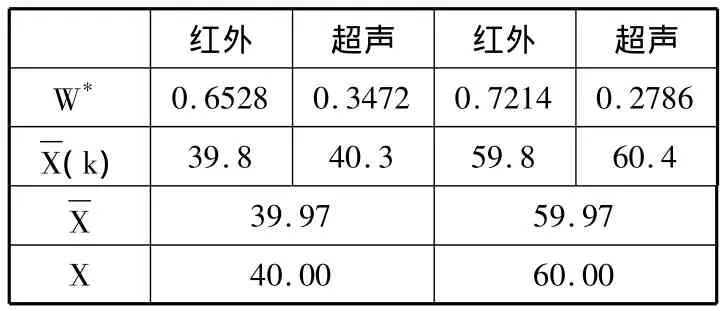
表1 红外/超声模块数据融合表
表1中W*为红外/超声模块对应加权因子,X(k)为红外/超声模块测量均值为红外/超声模块融合值,X为红外/超声模块测量真值。
5 结束语
本文设计了一种基于PSoC的地效飞行器高度检测系统。采用组合测距模式,提高了在地效段飞行时高度检测的精度。其中超声模块采用NE555D和CX20106A组成的超声测距模块,并给出原理图。GP2D12红外测距传感器结构简单使用方便,可直接与PSoC的AD口连接。并对红外/超声模块数据进行基于自适应加权平均数算法的数据融合,进一步提高了数据的可靠性。
:
[1]傅前哨.地效飞行器的空气动力学原理[J].现代军事,2005(3):12.
[2]林文祥,吴榕,唐雯.地效飞行器发展回顾及前景展望[J].航空科学技术,2011(1):8-10.
[3]梁毓明,徐立鸿.移动机器人多传感器测距系统研究与设计[J].计算机应用,2008,28(S1):340-343.
[4]沈燕,高晓蓉,孙增友,等.基于单片机的超声波测距仪设计[J].现代电子技术,2012,35(7):126-129.
[5]翟翌立,戴逸松.多传感器数据自适应加权融合估计算法的研究[J].计量学报,1998,19(1):69-74.
[6]曹小松,唐鸿儒,杨炯.移动机器人多传感器信息融合测距系统设计[J].自动化与仪表,2009,24(5):4-8.
[7]梁毓明,徐立鸿,朱丙坤.测距传感器数据在线自适应加权融合[J].计算机测量与控制,2009,17(7):1447-1449.
[8]王琪,蒋乐平.基于PSoC的飞艇艇内温度采集系统设计[J].电子技术应用,2012,38(1):41-43.
