汽车主动悬架的自适应控制研究
2014-08-21李国军
李国军
(晋中职业技术学院,山西 晋中 030600)
引言
悬架系统是汽车底盘非常重要的组成系统,它对汽车的舒适性能有着十分重要的影响。相对于传统的被动悬架,主动悬架更好地协调和提高了汽车行驶过程中的平顺性与操纵稳定性,从而进一步提高汽车的整体性能。近年来汽车主动悬架的研究和开发工作成了国内外观注的重点,并且已成为汽车动力学与智能控制领域比较前沿的课题。汽车主动悬架设计的关键就是能寻求一个能够为汽车提供良好控制性能的控制律。主动悬架系统的智能控制设计的本质可概括为一个典型的不确定、多变量系统的控制问题。但是大部分现有的主动悬架智能控制方法都存在一些特点,比如过于复杂、原理繁琐、附加条件过多,这些都不利于工程应用。因此,为了使控制方法简便实用而且有效,应用于主动悬架的自适应控制方法主要有增益调度控制、模型参考自适应控制和自校正控制三类。本论文中主动悬架设计以自校正控制为核心,以处理主动悬架的不确定、多变量特性,即用简单的控制方法实现对复杂系统进行有效的控制。
1 悬架的结构组成与作用
悬架的作用是把路面作用于车轮上的法向反力、切向反力和侧向反力以及这些反力所造成的力矩都传递到车架上,缓和并衰减汽车在行驶中产生的冲击与振动,保证汽车正常行驶[1]。
悬架可分为传统悬架(被动悬架)与电子控制悬架(主动悬架)。
被动悬架由弹性元件、减振器和导向机构所组成,这种悬架只能被动地承受地面对车身的各种作用力,无法对各种情况进行主动调节。弹性元件主要使弹性系统在受到冲击后产生振动,主要有钢板弹簧、螺旋弹簧、气体弹簧、扭杆弹簧等组成。减振器主要用于加速车架与车身振动的衰减,以改善汽车的行驶平顺性,主要有双向作用减振器和充气减振器等。导向机构主要用于确保车轮和车架之间所有力和力矩的可靠传递,保证车轮跳动时车轮定位参数的变化不会过大,使汽车具有良好的操纵稳定性[1]。
电子控制悬架由感应各种运行状态的各种传感器、电子控制单元、执行机构等组成,主要作用是通过控制调节悬架的刚度和阻尼力,使汽车的悬架特性与道路和行驶状态相适应,从而保证满足汽车行驶的平顺性和操纵稳定性的要求,使悬架性能总是处于最佳状态。基本功能有车高调整、减振器阻尼力控制和弹簧刚度控制等。工作原理:利用传感器把汽车行驶时路面的状况和车身状态进行检测,将检测信号输入计算机进行处理,计算机通过驱动电子控制悬架系统的执行器动作,完成悬架特性参数的调整。主动悬架分类:主动油气悬架、主动空气悬架、主动液力悬架。
2 自校正自适应控制系统是提高悬架性能的关键
汽车舒适性主要是指汽车为乘员提供舒适的乘坐环境和方便的操作条件,它包括汽车平顺性、空气调节性能、乘坐环境及驾驶员操纵性能等。这些因素都是不确定的。
自适应控制器的特点就是它能修正自己的特性以响应过程和扰动的动力学特性变化,使整个控制系统始终获得满意的性能。
自适应控制系统有三个显著特点:
1)控制器可调。自适应控制系统的控制器能在控制的过程中根据一定的自适应控制规则,不断改变自已的结构与参数;
2)增加了自适应回路。自适应控制系统在常规反馈控制系统基础上增加了自适应回路,它的主要作用就是根据系统运行情况,自动调整控制器,以适应被控对象特性的变化;
3)适用对象。自适应控制适用于被控对象特性未知或扰动特性变化范围很大,同时又要求经常保持高性能指标的一类系统,设计时不需要完全知道被控对象的数学模型。
应用于主动悬架的自适应控制方法主要有增益调度控制、模型参考自适应控制和自校正控制三类:增益调度控制是一种开环自适应控制,通过监测过程的运行条件来改变控制器参数;模型参考自适应控制采用跟踪一个预先定义的参考模型,根据反馈和辅助控制器参数的自适应控制规则,使非线性时变的悬架系统达到预期的最优性能;自校正控制通过将受控对象参数在线估计与控制器参数充分结合,形成一个能自动校正控制器参数的离散实时计算机控制系统(即数据采样系统),这是目前应用最广的一类自适应控制方法。
自校正控制系统又称自优化控制,通过采集的过程输入、输出信息,实现过程模型的在线辨识和参数估计。在获得的过程模型或估计参数的基础上,按照一定的性能优化准则,计算控制参数,使得闭环系统能够达到最优的控制品质,如图1所示。
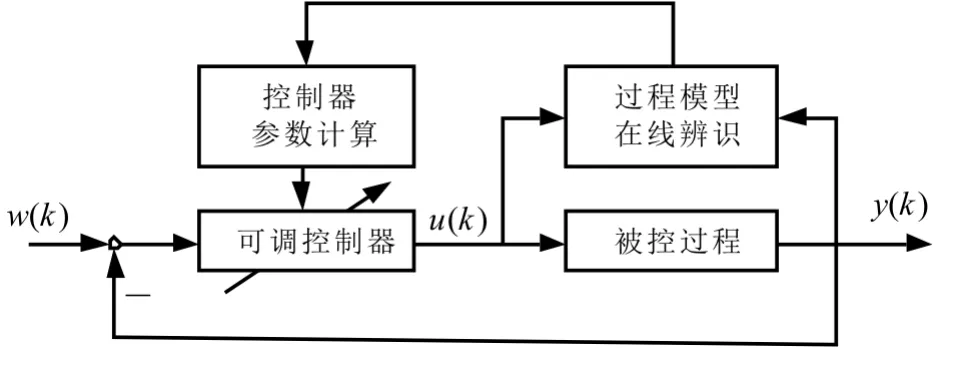
图1 自校正控制系统结构图
3 自校正控制器实现自适应控制系统
通过自校正控制器的动力学模型的建立与仿真能很好地反映自校正控制器对汽车自适应控制系统的作用。
3.1 主动悬架动力学模型的建立
动力学模型如图2所示:
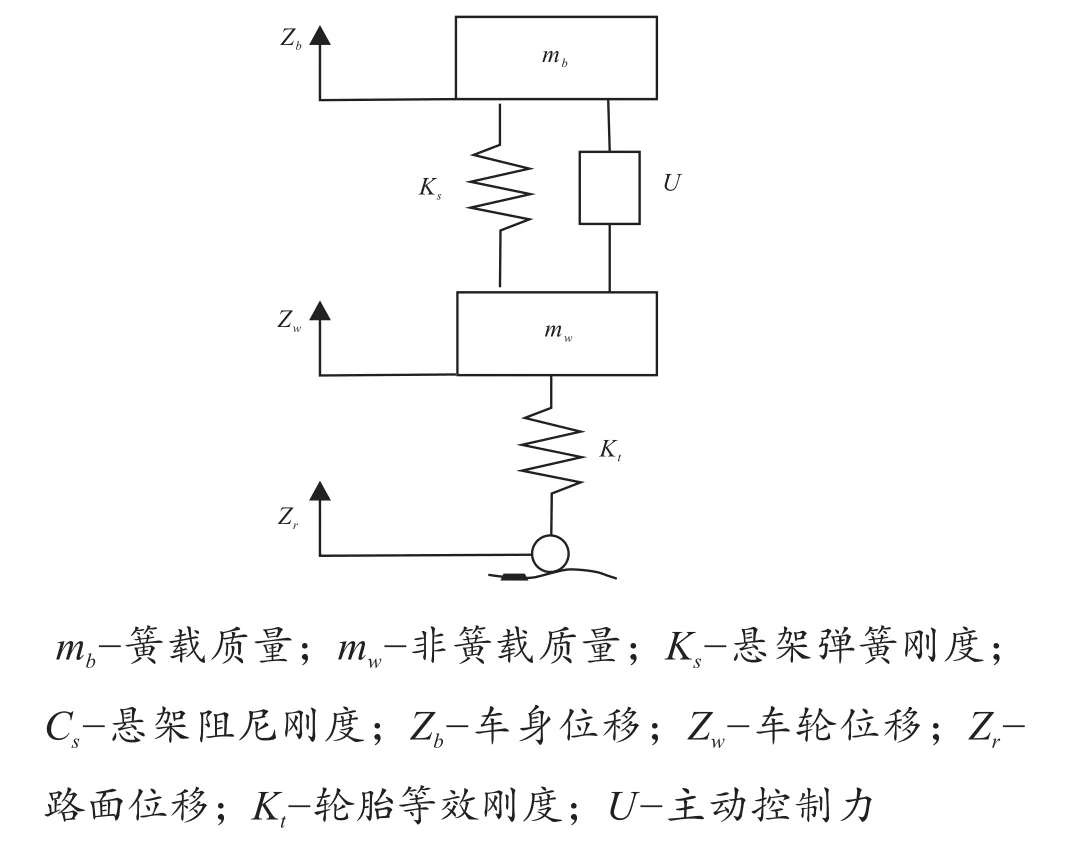
图2 车辆动力学模型
建立基于主动悬架的1/4车体的2自由度模型。
根据牛顿定律和力矩平衡,得出如下的运动方程:

3.2 1/4车体二自由度主动悬架建模与仿真
选取1/4车体被动悬架结构及路面仿真参数如下:1/4车身质量(簧载质量)mb=360 kg;悬架刚度Ks= 20 000 N/m;车轮质量(非簧载质量)mw=40 kg;轮胎刚度Kt= 200 000 N/m;悬架阻尼系数Cs=1 000 kg;B级路面不平度G=0.000 005 m3/周期 ;车速V=20 m/s;下截止频率f0=0.01 Hz。
根据主动悬架运动学方程,建立其Matlabsimulink仿真结果如图3和图4所示:

图3 簧载质量加速度
簧载质量加速度和轮胎动载荷是衡量汽车行驶平顺性的一个重要指标,采用自校正控制的主动悬架有效地降低了车身加速度和轮胎动载荷。
4 结语
汽车舒适性是汽车性能的一个重要的因素。通过采用主动悬架的自校正自适应系统,汽车在减小轮胎动载荷和悬置质量加速度方面都达到了令人满意的效果,使汽车悬架系统在各种状态下都能有效地减振,并且使汽车的平顺性得到提高,大大提高了汽车的舒适性。但是自适应系统还不成熟,还需要我们继续创新发展。
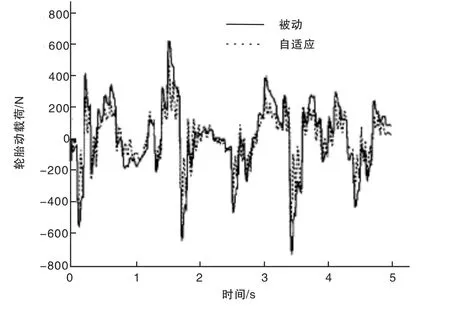
图4 轮胎动载荷
[1] 李春明,焦传君.汽车构造[M].北京:北京理工大学出版社,2012.
