基于骨架特征的多光谱遥感影像飞机目标识别方法研究
2014-08-15陈焱明
蔡 栋,陈焱明,魏 巍
(1. 江苏警官学院 治安管理系,江苏 南京 210012; 2. 南京大学 地理与海洋科学学院,江苏 南京 210093; 3. 国网电力科学研究院,江苏 南京 210003)
一、引 言
在高技术条件下的局部战争中,飞机发挥着十分重要的作用。通过对飞机目标的动态信息提取,可以准确把握区域动态,为相关决策提供支持。在模式识别研究中,飞机目标可分为飞行与地面静止两种状态。对于地面静止飞机目标的识别,国内外众多学者运用多领域处理方法进行了大量的研究:李科等通过建立飞机样本图像库,分析训练样本库中飞机图像的特征量,利用最小距离、BP神经网络和树分类器进行判别[1];徐大琦等提出了一种改进区域分割方法,并应用树分类器对飞机目标进行自动识别[2];徐科等提出将小波变换结合灰度共生矩阵法提取飞机目标样本信息特征,通过Brodatz纹理测试判别目标[3]。
目前,由于纹理特征、数学形态学特征和复杂几何结构等相对抗干扰性较强,对飞机目标的提取集中在研究遥感影像数据的上述几种特征上。其中,骨架线由地物的边界形态决定,不受其他因素影响,具有良好的稳定性,即使边界点发生细微变化,地物边界形态只要保持基本一致,骨架线形态特征在数值上呈现稳定性。在本研究中,由于地物边界通过遥感影像自动获得,边界点的提取具有一定随机性,因此,自动提取的骨架线会受一定程度影响,局部可能存在偏差。但地物边缘整体形态呈现稳定性,导致提取的骨架线形态基本稳定,对地物目标的识别几乎没有影响。自动提取骨架线的算法中,骨架线仅由地物边缘点坐标决定,无论地物目标发生何种角度的旋转或偏移,骨架线的形态保持不变,网络特征参数也保持不变。因此,研究通过自动提取多光谱遥感影像中地物边缘实现地物矢量化,再经由抽取骨架线提取地物特征参数,采用聚类方法,自动提取飞机目标。
二、研究方法
遥感影像目标自动识别在国民经济和国防建设中有大量的需求和广阔的应用前景,是信息处理领域的重要研究内容。由于依靠图像的几何、纹理、灰度特征很难准确、可靠地解决目标识别问题,因此,研究尝试利用骨架线矢量形态特性来分析地物目标,自动进行多光谱遥感影像中的飞机目标识别。虽然该方法目前受到遥感影像图像分割技术的限制,提取地物边缘未能达到最佳效果,但是随着遥感成像技术与图像分割技术的发展,从多光谱遥感影像精确提取地物边缘已成为可能,应用地物矢量特性提取地物精度必将随之提高。
本文研究方法包括3个阶段:①目标边缘提取。采用刘永学等提出的基于边缘的多光谱遥感影像分割方法[4],实现多光谱遥感影像的高精度自动分类,提取地物边缘,并将之转换为矢量地物边缘。②以Visual C++6.0为平台,提取地物骨架线。以地物边缘作为约束条件,采用基于约束Delaunay三角网自动提取地物骨架线的算法,提取各个地物的骨架线,并同时计算各支骨架长度(骨架线网络中两个节点之间的骨架线段长度),取最长骨架线作为地物的主骨架,将提取的骨架线及主骨架存储为SHP格式。③ 飞机地物自动提取。利用AO开发技术,计算地物目标骨架线特征参数,采用自动聚类方法,实现飞机目标的自动识别与定位。研究技术路线如图1所示。

图1 研究技术路线图
三、研究内容
1. 目标边缘提取
基于地物骨架线特征进行自动识别对从遥感影像自动提取的地物骨架线质量要求很高,经过对各算法效果及效率进行比较,本文选择基于边缘的自动提取算法。此算法充分利用多波段亮度信息,对地物的细节信息表现较好,与多阈值法、分形网络演化算子相比,分割效果更为理想。
本文选取香港机场多光谱遥感影像作为试验数据,如图2所示。分割时将多光谱遥感图像中各波段的边缘信息作为遥感图像分割的依据,将边缘检测作为遥感图像分割的基础,基于边缘的多光谱遥感图像分割方法可细化为边缘检测、边缘综合、边缘生长、区域标号4个环节。具体实现思路为:① 边缘检测。通过边缘检测算法提取遥感图像中各单波段遥感图像中的地物边缘信息。② 边缘综合。在检测出各波段地物边缘信息的基础上进行综合,以充分利用多光谱遥感图像中的光谱信息。③ 边缘生长。通过边缘检测、边缘综合得到的边缘有可能是断裂、不连续的,并不能保证区域的封闭性,因此采用边缘生长的手段连接边缘图像中断裂的边缘。④ 区域标号。在边缘生长的基础上,进行区域标号,消除不构成区域的边缘,生成标号图像对象,得到最终多光谱遥感图像分割结果。由该方法提取的地物边缘不可避免地存在一些偏差,最终需要进行主观修正,提取结果如图3所示。

图2 香港机场
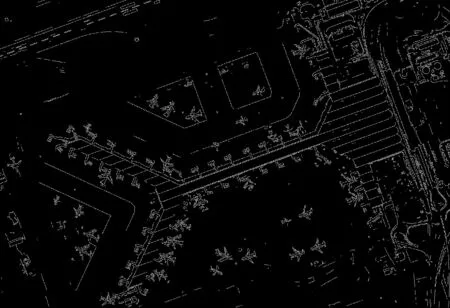
图3 边缘提取结果
2. 地物骨架线提取
(1) 基于Delaunay三角网自动提取骨架线
基于矢量目标边缘提取骨架线的方法目前主要有基于Delaunay三角网剖分的骨架法、计算几何中轴定义和纯角平分线算法[5]。由于基于Delaunay三角网剖分的骨架法应用比较广泛,且数据组织和算法相对其他两种算法简单易行,因此本文采用该方法提取骨架线。
自动提取的地物边缘细节特征丰富,适当压缩地物边缘数据可以大大提高提取骨架线的计算效率。因此,首先对地物边缘进行压缩,然后根据地物边缘依次对所有地物提取骨架线。
1) 将地物边缘数据离散为散点,排除重合点的影响后,对边缘数据进行排序。对坐标点按x为主关键字,y为次关键字进行排序,对坐标进行排序是为了提高建立三角网的效率。数据预处理后,再采用逐点插入算法建立初始三角网,以边缘的每一条边作为约束边,检测约束边的影响区域(与约束边相交的三角形集合称为该约束边的影响区域)。在约束边的影响区域内,按规则逐步交换对角线,最终使起始点和目标点相连。遍历所有约束边,建立带约束条件的三角网[6]。由于边缘可能存在复连通区域,必须按照“若三角形在多边形内,则三角形中心必在多边形内”的原则剔除位于地物外的三角形,构建地物内的三角网。
2) 对三角网中的三角形建立拓扑关系,并逐个编码。仅有一个邻接多边形的为Ⅰ类三角形,有两个邻接多边形的为Ⅱ类三角形,有三个邻接多边形的为Ⅲ类三角形。依照三角形所属类型,选择相应骨架线网络连接规则,如图4所示,对三角网内的骨架线节点进行连接,提取出骨架线。

图4 3类三角形骨架线的连接规则
(2) 提取主骨架
主骨架长度是反映地物几何大小的重要参数。本文在提取地物骨架线后,还需跟踪建立骨架线的点-弧段拓扑关系,以二叉树左序遍历,提取最长骨架线,作为地物的主骨架。以下将当前节点所对应的骨架线树中的结点,若该结点的左右子结点都为非空,则称之为中间节点,其他节点称为非中间节点。具体算法如下:
1) 以一个任意的非中间节点作为起始节点。
2) 若当前节点为当前搜索最长骨架的起始点,将当前节点作为最长骨架的起始点;反之,计算当前最长骨架的累计路径长度,将当前节点加入到最长骨架中。
3) 若当前节点(非起始点)是中间节点,将当前节点所连通的节点依照左序遍历选取一个节点,作为当前节点;否则,计算当前最长骨架的累计长度,若累计长度大于最长骨架长度,将当前骨架作为最长骨架线,清零累计长度,直至所有节点都搜索完毕。
3. 飞机目标识别
(1) 骨架特征参数
本文选取的骨架特征参数主要分为几何特征和网络测度。几何特征参数对于不同几何大小的地物目标具有良好的区分度,主要包括骨架长度、主骨架线长度、主骨架长度面积比参数。骨架长度为骨架线所有分支的和,反映地物目标的尺寸;主骨架长度为骨架线中的最长连通路径,反映地物目标主方向尺寸;主骨架长度面积比为最长骨架长度除以地物目标面积,反映地物目标的总体形态。地物目标的骨架线形态可以采用网络平面图进行抽象概括,网络测度对骨架线的连通性、复杂度等特性进行定量描述,具有唯一性、旋转不变性、缩放不变性,主要包括连线数目m、节点数目n、网络子图数目p、β指数、Γ指数。其中,连线数目m是指骨架线网络连线数目,反映地物目标复杂性;节点数目n是指骨架线网络节点数目,反映地物目标复杂性;网络子图数目p是指骨架线网络子图的数目,反映地物目标复杂性;β指数,也称折点率(计算公式为β=m/n),反映地物目标复杂程度;Γ指数(计算公式为Γ=m/(3×(n-2×p)),反映地物目标网络连通性。
(2) 飞机目标识别
飞机目标几何特征及网络测度特征参数与其他地物差异较大,为减少获取先验知识的工作量,采用直接聚类的方法进行飞机目标的识别。聚类分析,也称群分析,是根据样本本身的属性,用数学方法按照某种相似性或差异性指标,定量确定样本间的亲疏关系,并按照亲疏关系对样本进行聚类[7]。
计算所有地物目标的骨架线特征值,由于不同要素的数据往往具有不同的单位和量纲,数值的变异性很大,因此在聚类前需对聚类要素进行标准化处理,将各个特征参数进行标准差标准化。在试验数据遥感影像中,飞机目标参数特征明显;空地与地面建筑呈现相对规则的多边形,面积差异不大,很难区分开,给分类带来较大干扰。研究采用K-Means聚类法,对遥感影像中的地物进行分类,地物目标特征参数见表1,特征参数标准差标准化见表2,聚类结果见表3。

表1 地物目标特征参数表

表2 经标准化处理后的地物目标特征参数表

表3 3种自动聚类方法分类结果
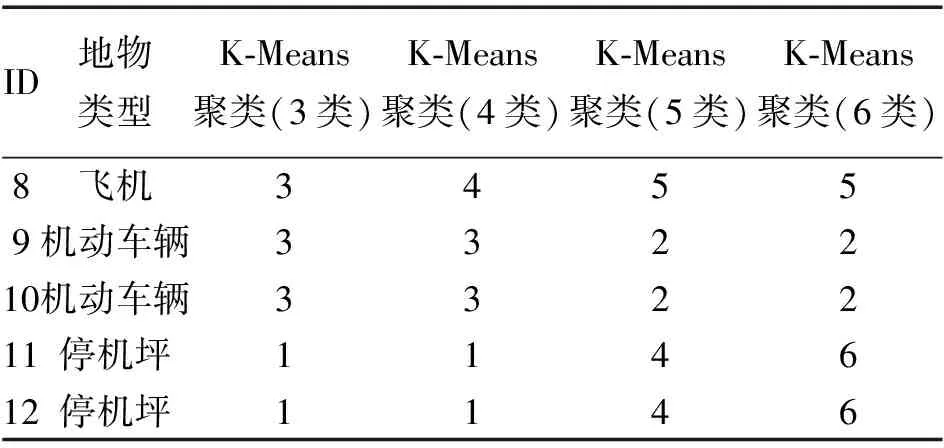
续表
以地物目标聚类结果为基础,通过分析地物目标特征参数值分布,自动识别飞机目标所在类别。分析试验结果可知,香港机场的民用飞机骨架线总长度变化范围为230~260 m,主骨架长度变化范围为80 ~120 m,骨架线网络连线及节点数目均大于15。对于实验室采用的香港机场遥感影像数据而言,聚类数为4时自动分类效果最好。结合飞机目标特征参数先验知识,判定分为4类时,第4类目标为飞机目标。
4. 试验结论与分析
分析聚类结果可知,当聚类数为4时,各类目标被很好地识别出来,聚类精确性较高。在飞机目标自动提取中,主要存在3个方面问题:
1) 飞机目标在聚类过程中与空地误分的概率较高,该空地为用于飞机停机的场地,面积较大,在几何特征上与飞机目标有一定相似性。
2) 多光谱遥感影像上阴影是普遍存在的问题,阴影对自动提取地物边缘产生干扰,从而扰动了地物提取的结果,如图5所示,部分阴影被归入邻近地物目标,而部分则被单独提取出来。随着聚类数的变化,阴影被归入了飞机、机动车辆中。但在合理选取聚类数的前提下,阴影的存在不会导致飞机目标的误分。因此,阴影很难被独立提取为一个地类,在本文中借助选取最佳聚类数,尽量避免阴影的影响。

图5 飞机目标边缘识别图
3) 飞机目标在飞机场中停靠在停机坪,在影像中停机坪与飞机目标几乎是相连的。因此,在地物边缘自动提取过程中,飞机目标与停机坪很可能被连成一个对象,在表1的4架飞机中,有2架飞机被连同停机坪提取。但分析试验结果可知,即使停机坪与飞机目标被连成一个目标,该方法也可以成功提取出飞机目标。
四、结束语
本文选取香港机场多光谱遥感影像作为试验数据,基于骨架线几何特征参数与网络测度,提出了一种基于多光谱遥感影像自动提取飞机目标的方法。选择基于边缘的多光谱遥感影像分割方法,提取矢量地物边缘;基于约束Delaunay三角网自动提取地物骨架和主骨架;通过选取对飞机目标识别具有良好区分度的特征参数,最终实现飞机目标的自动识别与定位。经过试验,证明基于骨架线形态特征进行多光谱遥感影像中飞机目标识别方法有效可行。
由试验发现,聚类数的选取对提取效果产生决定性影响,而合适的聚类数将因不同的遥感影像而异,并不具有通用性。因此,可以考虑BP神经网络进行飞机目标的自动识别,即以骨架特征分析结果为基础,以提取的骨架特征为输入样本,运用基于BP神经网络的自动识别方法,完成飞机目标自动识别。这也将是今后重点的研究方向。
由于受到各种因素扰动,基于骨架线特征自动提取飞机目标的稳定性有待提高。在提取过程中处理好连通目标及阴影等问题,将有助于提高算法的稳定性;同时,综合研究地物光谱特征与骨架特征,也将提高自动提取的精确性。
参考文献:
[1] 李科,王润生,王程.一种用于飞机型号识别的树分类器方法[J]. 计算机工程与科学, 2006,28(11): 136-139.
[2] 徐大琦, 倪国强, 许廷发. 中高分辨力遥感图像中飞机目标自动识别算法研究[J]. 光学技术, 2006,32(6):855-859.
[3] 徐科,易善桢.基于小波变换和支持向量机的遥感图像目标检测[J].计算机与数字工程,2007,35(7):123-125.
[4] 刘永学,李满春,毛亮.基于边缘的多光谱遥感图像分割方法[J].遥感学报,2006,10(3):350-356.
[5] 胡鹏,王海军,邵春丽,等.论多边形中轴问题和算法[J].武汉大学学报:信息科学版,2005,30(10):853-857.
[6] 黄利民,张跃鹏.利用三角网方法实现面域骨架线的自动生成[J]. 测绘学院学报, 2002,19(4):262-264.
[7] 徐建华. 现代地理学中的数学方法[M].2版.北京:高等教育出版社,2002.
[8] 李志林, 朱庆. 数字高程模型[M].武汉:武汉大学出版社, 2001.
[9] 艾廷华,郭仁忠.基于约束Delaunay结构的街道中轴线提取及网络模型建立[J].测绘学报,2000,29(4): 348-354.
[10] 杨俊,赵忠明,杨健.一种高分辨率遥感影像阴影去除方法[J].武汉大学学报:信息科学版,2008,33(1):17-20.
[11] CHIN F, SNOEYINK J, Wang C A. Finding the Medial Axis of a Simple Polygon in Linear Time[C]∥Algorithms and Computations.Heidelberg:Springer,1995:382-391.
[12] HAUSKA H,SWAIN P H.The Decision Tree Classifier: Design and Potential[J].IEEE Transactions on Geoscience Electronics,1997,15(3):142-147.
[13] LI Y,SASAGAWA T,GONG P.A System of the Shadow Detection and Shadow Removal for High Resolution City Aerial Photo[C]∥ISPRS Congress.[S.l.]:ISPRS,2004:12-23.
[14] DO M N,VETTERLI M.Contour Lets:a Directional Multi-resolution Image Representation[C]∥Proceedings of 2002 International Conference on Image Processing.[S.l.]:IEEE,2002(1):357-360.
[15] BHANU B,PENG J.Adaptive Integrated Image Segmentation and Object Recognition[J].IEEE Transactions on Systems,Man and Cybernetics,Part C:Applications and Reviews,2000,30(4):427-441.
