无人值守自动变形监测系统在深圳地铁结构变形监测中的应用
——以环中线前海湾站为例
2014-08-15林新烁
林新烁
(深圳市博飞仪器有限公司 工程测量技术部,广东 深圳518028)
一、概 述
深圳地铁环中线前海湾站地铁结构变形监测项目位于深圳地铁环中线前海湾站与临海站之间,距前海湾站约700 m。地铁结构变形监测范围为上、下行双线各约150 m长的盾构隧道,如图1所示。鉴于地铁运营的特点,变形监测要求全自动化运行,即实现在地面某处对地铁地下隧道结构变形监测的自动化全站仪进行远程控制与管理。
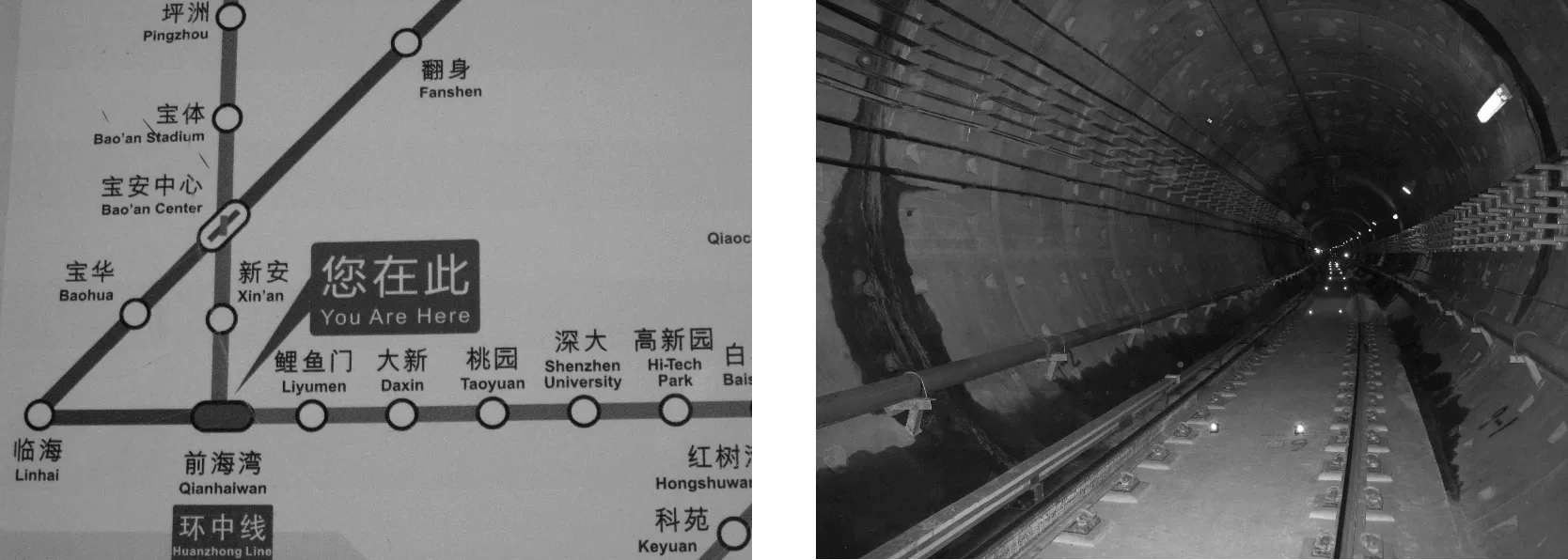
图1 变形监测项目地理位置示意图
AutoMoS(Automatic Deformation Monitoring System)变形监测系统硬件设备基本配置:自动照准型全站仪SRX1X 2台;全站仪固定支架2套;基准点棱镜及支架8套;电源保护箱(含变压器、供电、继电器等)2套;CDMA模块及CDMA手机卡 2套;电源线200 m;PC便携电脑1台;变形监测点棱镜80个;安装电工工具及钻孔工具2套。
二、无人值守自动化变形监测系统组成
1) 为了实现上述地铁结构三维变形监测的自动化,引进了AutoMoS无人值守自动化变形监测系统。该系统主要由自动化全站仪(索佳品牌的超级机器人SRX1X)、有线或无线通信系统、基于PC机运行的系统软件等设备组成,图2为双机版AutoMoS系统组成框图。

图2 双机版AutoMoS系统框图
2) 本变形监测项目位于含有弧线段的盾构隧道,监测设备(包含自动化全站仪、变形监测基准点棱镜、变形区监测棱镜等)分布示意图如图3所示。

图3 监测设备安装分布图
3) 自动化全站仪(或称测量机器人)是地铁结构变形自动化监测系统的核心硬件设备,在系统软件的控制下自动照准基准点和变形点的目标棱镜,获取精确的角度与距离信息。如图4所示,在地铁隧道管壁一侧安装特制的全站仪支撑平台,保证全站仪在地铁列车运营安全界限范围内长时间稳定运行。前海湾地铁站隧道变形监测现场安装的是索佳SRX1X(1″级)自动化全站仪。
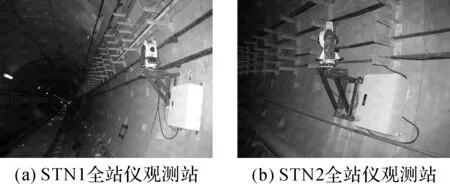
图4 自动化全站仪观测站与通信控制箱
4) 通信与供电箱(参见图4)是自动化变形监测系统的重要组成部分,其作用一是为全站仪提供不间断电源,二是实现全站仪与远程监控计算机之间的数据通信。在前海湾监测项目中,采用移动无线接入因特网的方式进行地铁现场监测全站仪与远程监控计算机之间的联机通信,实现监测系统软件对远程全站仪的控制与数据采集。
5) 基准点棱镜为前海湾地铁站的结构变形监测提供稳定基准,因此它们分布在离变形区较远的地方(如图3所示),在上行或下行隧道变形监测区域两侧分别设立2个基准断面,共4个基准点。基准棱镜为索佳标准圆棱镜,由钢制三角形支架支撑,该支架由膨胀螺栓紧密固定在隧道的墙壁上,如图5所示。
6) 变形监测断面及棱镜分布为:
a. 变形监测断面与棱镜布设编号规则:变形监测断面从西(临海站方向)至东(前海湾方向)上、下行线各有12个(如图3所示,DJ1—DJ12),每个断面计划安装3个变形监测棱镜,其中2个位于轨道地面上(已安装,如图5所示),另1个计划安装在圆形隧道顶部(调试运行时暂未安装);变形监测断面棱镜编号用4~5位字母和数字表示(如DJ6-1),前两位字母为DJ,第三、四位数字代表断面号(1—12),最后一个数字代表断面内的棱镜编号。如“DJ6-1”表示为下行线第6个断面上的第1号监测棱镜。图6分别给出了上、下行隧道变形监测断面棱镜分布与编号示意图。

图5 基准点棱镜

图6 上行和下行线断面棱镜分布示意图
b. 变形监测断面棱镜的安装:变形监测断面上的棱镜为L型小棱镜,在正常情况下,把L支架直接固定在墙体或地面上即可。图7给出了隧道监测断面棱镜分布实景图,其中轨道中间的反光亮点即为变形监测棱镜。

图7 隧道变形监测断面棱镜安装实景图
7) 在监测项目管理人员办公室等合适地点布设有线登录因特网的设备,为监测专用的计算机提供上网条件。同时,在监控中心计算机中安装AutoMoS监测软件(如图8所示),在监测软件定时器的控制下,智能化、周期性地定时启动监测系统,实现远程计算机通过因特网对监测现场自动化全站仪的控制与数据采集。监控中心的主要安装调试工作有:计算机登录因特网;启动AutoMoS监测软件;初始化全站仪,实现计算机与远端自动化全站仪的联机通信;学习基准点和变形监测点棱镜;配置点组与定时器;配置自动化测量有关的设置项;启动定时器,启动自动化测量,实现监测系统无人值守智能化运行。

图8 AutoMoS监测软件
三、地铁结构断面变形监测精度统计
2012年2月22日,基本完成了前海湾站地铁结构变形自动监测系统有关设备的安装之后,于凌晨6点左右开始,监测系统开始投入无人值守的全自动化测试运行。系统监测周期间隔为30 min,至早上8点左右,顺利实现了上下行线2个监测站4个周期(周期号为2—5)的连续运行监测。在2 h左右的时间内,可以近似认为地铁隧道稳定不变,其变形量近似为零。因此分别计算各变形点2—5号周期三维坐标的平均值作为参考(本底基准)周期(周期号为1)的数据,并把2—5号周期相对第1周期(参考周期)的三维坐标变形量当作偶然误差来处理,统计系统变形监测的实测精度,结果见表1。

表1 地铁前海湾站结构变形监测实测精度统计 mm
注: 上下行线分别参加实测精度统计的各有4个周期23个变形监测点;变形监测点离测站的最远距离约100 m。
上行线DJ8-4、下行线DJ4-2参考周期数据有误(后已处理),故未参加本次变形监测实测精度统计。
从表1中可以看出:① 上下行线变形点三维坐标实际监测精度基本一致,标准偏差都不大于0.5 mm,可以达到亚毫米级的变形监测精度要求;② 监测系统顺利获取的首期4个周期的变形监测数据,除了极个别点某坐标分量值大于1 mm,其余所有变形监测点三维坐标分量的变形值都小于1 mm,由此可以说明变形监测实测精度高,而且数值一致性很好,变形监测结果稳定可靠。
四、总结与建议
通过2月22日—23日两天的调试运行,上述AutoMoS无人值守自动化变形监测系统无论在地铁暂停运营的时间段(0∶00—5∶00)还是在运营时间段(6∶00—23∶00)都能正常运行,并能获取合格的变形监测数据。自动化全站仪一般采用方便实用的极坐标方法进行变形监测。从极坐标原理可知,要想获得准确的测量结果,必须有效解决大气折射率对测距的影响,以及地球大气差对三角高程测量的影响。AutoMoS无人值守监测自动变形监测系统的创新技术体现在:在稳定的基准点设站采用多重差分技术和在欠稳定的工作基站点设站采用自适拟稳定技术,无需观测大气气象参数,并顾及地球大气差对单向三角高程观测的影响。AutoMoS无人值守监测自动变形监测系统是地铁变形监测实施的一整套成熟、完善的技术方案,明确了地铁变形监测的评定标准,可作为今后地铁变形监测的重要借鉴。
建议地铁及其他城市轨道等工程项目,在施工期间及竣工运营后,把对主体结构的沉降、水平位移、收敛等变形监测工作提到议事日程,重视资料的整理和积累,给出主体结构的变形情况,以及主体结构变形的发展趋势,并提出整治方案。逐步修正理论依据,完善监测方法,使地铁监测成为保障地铁安全运营的重要环节。
参考文献:
[1] GB 50308—2008城市轨道交通工程测量规范[S].北京:中国建筑工业出版社,2008.
[2] JGJ 8—2007建筑变形测量规范[S].北京:中国建筑工业出版社,2007.
[3] 包欢,徐忠阳,张良琚.自动变形监测系统在地铁结构变形监测中的应用[J].测绘学院学报,2003,20(2):103-105.
[4] 卫建东,包欢,徐忠阳,等.基于多台测量机器人的监测网络系统[J].测绘学院学报,2005,22(2):154-156.
