一种稳健的倾斜航空影像粗差探测方法
2014-08-15戴激光王新亮郭一洋
戴激光,王新亮,郭一洋
(1. 辽宁工程技术大学 测绘与地理科学学院,辽宁 阜新 123000; 2. 中国测绘科学研究院, 北京100039; 3. 中测新图(北京)遥感技术有限责任公司, 北京100039)
一、引 言
倾斜航空摄影测量技术是近年摄影测量领域的研究热点之一,该技术不仅能够真实地反映地物情况,而且还通过采用先进的POS定位技术,兼具有精确的地理信息和更丰富的影像信息,极大地扩展了遥感影像的应用领域[1]。但相对于传统的近似垂直航空影像,倾斜影像之间存在地物几何变形大、分辨率变化大、影像旋转、地物相互遮挡和特征信息差别大等问题,这导致在获取匹配观测数据过程中会产生较大的误差。而在针对误差处理的平差过程中,对粗差的探测难度最大,需要对其进行深入的研究。
针对粗差探测的问题,目前国内外提出了很多算法:文献[2]提出了一种多维粗差同时定位与定值法(LEGE)方法,完全摆脱了过去粗差检测中需要利用假设检验进行判断的框架,适用于各种平差模型;文献[3—5]提出了一种粗差的拟准检定法(QUAD),以真误差为研究对象,借鉴“拟稳平差”思想,附加“拟准观测的真误差范数极小”的条件,解决了关于真误差的秩亏方程组求解的问题,由于采用选群拟合而非强制性附合,故检测粗差准确性高;文献[6]研究了等价协方差矩阵法,该方法不仅可以控制观测异常的影响,而且保持了原有观测的相关性不变;文献[7—9]基于数理统计理论利用贝叶斯方法实现了粗差的探测定位;文献[10]提出了部分最小二乘原理,通过迭代搜索定位粗差的本质结合了K均值和系统聚类的思想。
但由于倾斜航空摄影测量利用自动化的数据采集手段来快速获取多类海量观测数据,这种等精度的海量观测数据,其粗差具有更强的隐蔽性和干扰性,而现有的粗差检测方法基本只适合处理含有少量观测值的测量数据,因此对于倾斜航空摄影测量的海量观测数据在探测效能和处理效率上无法满足要求。针对这一问题,本文提出一种采用无需未知数近似值的相对定向直接解模型,作为倾斜影像匹配观测数据通用的粗差探测平差数学模型,以此来对倾斜航空摄影影像进行粗差探测。
二、倾斜航空影像粗差探测平差模型
针对倾斜航空摄影匹配影像的相对定向元素情况复杂多样的特点,为了能够准确地探测倾斜航空摄影海量匹配数据中的粗差,本文首先在快速多维定位定值法的基础上,基于相关分析粗差探测原则建立了分组标准,从而快速将观测值分组为非准观测类和粗差观测类[11]。然后提出一种采用直接解相对定向模型作为粗差探测使用的平差数学模型,该模型克服了计算过程与结果对于角元素近似初值的依赖,与基线分量有关的角元素μ、ν也不再影响模型的计算精度,并且该解法的误差方程式不需要迭代求解。
1. 直接解相对定向模型


其中
式中,(x,y)表示m的像平面坐标;f表示左影像的焦距;(x′,y′)表示m′的像平面坐标;f′ 表示右影像的焦距;R右表示根据右影像的角元素(ω,φ,κ)计算的旋转矩阵。
将共面条件方程式(1)展开,得
L1yx′+L2yy′-L3yf′+L4fx′+L5fy′-L6ff′+L7xx′+L8xy′-L9xf′=0
(3)
其中,L1、L2、…、L9为相对定向直接解的基本模型的未知参数,分别为
式(3)等式两边同时除以L5,得

(4)


2. 直接解相对定向模型的参数解算
当基线分量BX给定之后,则L5和另两个基线
分量BY、BZ可根据下式求得
而右像片对应的旋转矩阵R右中的9个元素可由下列式子求得
由式(5)可知,L5会有正、负两个解,此时需要讨论L5的取值,其解的正负对于旋转矩阵的9个参数的求解至关重要,因为L5的两个解对应求得的旋转矩阵参数是完全不同的。


图1 相对定向第二个解的几何解释
若空间直角坐标系围绕着矢量l=(λ,μ,γ)旋转任意角度θ,则其旋转矩阵为
当取基线B为单位向量时,有λ=BX、μ=BY、γ=BZ,且旋转角为θ=180°时,按照式(7)可求得
根据式(8)可知,两个旋转矩阵RP与RN之间存在着下述关系
RP=ARN或RN=ARP
(9)
其中,A是由基线分量所决定的,且必须是规格化后的基线分量
在相对定向模型中,通常取左像片的像空间坐标系作为相对定向模型的方位元素的参数坐标系,如图2所示。为了确保右像片能与左像片构建立体像对,右像片的方位角元素φ、ω(确定摄影方向的元素)必须满足φ>-π/2、ω>-π/2的取值范围,即为可确定的唯一的正确解。

图2 φ、ω的取值范围
三、试验分析
1. 试验数据
试验影像来源于TOPDC-5飞行数据,其垂直影像的尺寸大小为5984像素×9392像素,倾斜影像的尺寸大小为5474像素×7312像素,两种影像的像素大小都为0.006 mm。倾斜航空影像匹配组合方式有3类:同名相机且重叠区比例尺变化一致的影像间匹配、同名相机但重叠区比例尺变化不一致的影像间匹配及混合相机的影像间匹配。本文针对3种匹配类型分别选取了一组观测数据进行粗差探测试验,并将探测结果绘制于实际影像上。
2. 试验结果与分析
在试验中,“+”表示正常观测值,带有 “○”标志的为粗差观测值,并标示出了粗差观测值像点名。如图3所示。

图3 正常观测值与粗差观测值示意图
对三组影像进行粗差探测结果论述如下:
1) 同名相机且重叠区比例尺变化一致的影像数据粗差探测。本组试验选取了左视倾斜相机在连续两个曝光点获取的影像,两张影像不仅整体比例尺变化一致,而且重叠区地物的比例尺变化也一致,试验结果如图4所示。

图4 同名相机且重叠区比例尺变化一致的影像
2) 同名相机但重叠区比例尺变化不一致的影像数据粗差探测。本组试验选取了前视倾斜相机在连续两个曝光点获取的影像,两张影像虽然整体比例尺变化一致,但是重叠区地物的比例尺变化不一致,试验结果如图5所示。
3) 混合相机的影像数据粗差探测。本组试验选取了一张前视倾斜影像和下一曝光点获取的垂直影像,两张影像的像幅大小不同且影像整体的比例尺变化也不相同,其他混合相机影像组合也符合该特征,试验结果如图6所示。
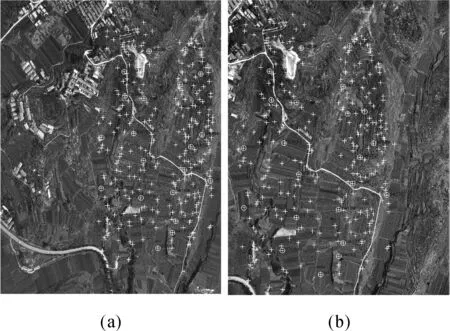
图5 同名相机但重叠区比例尺变化不一致的影像

图6 混合相机的影像


表1 3组试验粗差探测结果对比 mm
由表1可知,利用本文算法求出的单位权中误差估值相对于传统算法的估值要小,这表明本文方法的平差精度获得了较大的提升。由此可以证实:面对倾斜航空摄影的匹配影像组合方式多样的情况,以直接解相对定向模型作为平差数学模型,解决了传统连续相对定向模型对于角元素近似初值依赖的问题,因其求解过程无需姿态角的近似初值和迭代计算,可直接解算出每张影像的旋转矩阵,故通用性极强,为倾斜航空影像匹配观测数据的粗差探测奠定了良好的基础。
四、 结束语
本文针对倾斜影像匹配观测数据问题,提出以直接解相对定向模型作为处理倾斜影像匹配观测数据的平差数学模型,结合多维粗差同时定位和定值法,不仅能够简便地处理多种倾斜影像匹配观测数据,还可以快速地对观测数据中的多维粗差同时进行定位和定值,有效地减少粗差对平差系统的影响,提高了数据处理精度。
参考文献:
[1] 王伟,黄雯雯,镇姣.Pictometry倾斜摄影技术及其在3 维城市建模中的应用[J]. 测绘与空间地理信息,2011, 34(3):181-183.
[2] 於宗俦,李明峰.多维粗差的同时定位与定值[J].武汉测绘科技大学学报,1996,21(4):323-329.
[3] 周江文,欧吉坤.拟稳点的更换——兼论自由网平差若干问题[J].测绘学报,1984,13(3):167-170.
[4] 欧吉坤.粗差的拟准检定法(QUAD法)[J].测绘学报,1999,28(1):15-20.
[5] 欧吉坤.一种检测粗差的新方法——拟准检定法[J].科学通报,1999,44(16):1777-1781.
[6] 刘经南,姚宜斌,施闯.基于等价方差—协方差阵的稳健最小二乘估计理论研究[J].测绘科学,2000,25(3):1-6.
[7] 归庆明,宫铁松,李国重,等.粗差探测的Bayes方法[J].测绘学报,2006,35(4):303-307.
[8] 归庆明,李新娜.多个粗差定位的抗掩盖型Bayes方法[J].武汉大学学报:信息科学版,2010,35(1):1-5.
[9] 李保利,宫铁松,归庆明.基于方差膨胀模型的粗差探测Bayes方法[J].测绘科学技术学报,2007,24(6):399-401.
[10] 王爱生,欧吉坤.部分最小二乘平差方法及在粗差定值与定位中的应用[J].测绘科学,2005,30(2):70-72.
[11] 裴亮,王新亮. 摄影测量中多维粗差的同时定位和定值方法研究[J].测绘科学,2014,39(1):106-109.
