电触觉的皮肤神经机理仿真及实验验证
2014-08-11张定国
徐 飞 张定国 许 恒
上海交通大学机械与动力工程学院,上海 200240
电触觉的皮肤神经机理仿真及实验验证
徐 飞 张定国*许 恒
上海交通大学机械与动力工程学院,上海 200240
触觉学已经在很多领域得到应用,如遥控机器人、手术机器人、假肢、娱乐交互界面以及虚拟现实技术等,以此来增强人对机器或者虚拟物体的操作性。电触觉是现在主要的触觉再现措施,即通过改变恒流/恒压电脉冲的频率、脉宽、强度以及脉冲方向等因素,让人产生不同的触觉感。首先通过人体皮肤神经的建模推导出激励函数,并进行仿真研究,通过改变施加在电刺激阵列的电脉冲方向和强度,设计能分别刺激皮下3种刺激感受器(Meissner触觉小体、Merkel触盘、Pancinian环层小体)的实验范式,同时进行了心理物理学实验。10位受试者参加了实验,对食指进行电触觉刺激。正脉冲时采用不同频率(10、30、70、90 Hz)的电脉冲进行刺激,让受试者产生不同级别的振动感;负脉冲时采用不同脉宽(150、200、250、300 μs)的电脉冲进行刺激,让受试者产生不同级别的压力感。受试者对振动和压力的感觉强度进行主观判断。统计结果表明,该模型下的实验模式能够使触觉强度分级平均识别率高达80%以上,同时可通过对刺激电极分布以及电流大小的分析,找到最佳的刺激模式,保证最佳的触觉再现。
触觉学;电触觉;电刺激;皮肤神经;心理物理学实验
引言
对于人体来说,主要的反馈信息主要包含3种:触觉反馈、声音反馈以及视觉反馈[1]。其中,触觉感受作为反馈信号的一种,在人的日常活动中能让人产生强烈的临场感,它在感觉系统中占有重要的地位,具有视觉等其他感觉无法实现的功能。触觉是接触、滑动、压觉等一系列机械刺激的总称,它的感受器分布在人的全身,主要是由压力和牵引力作用于感受器而引起人的感受。通过人体皮肤的感受器来感受触觉信息,能让人感受到外部环境的空间以及时间信息[2-3],即物体的材质、粗糙感、振动以及温度等外部环境信息。所以,触觉的研究一直是虚拟现实、远程操作以及人机界面等领域的研究重点。实现触觉再现的方法有很多种,电触觉相对于其他的触觉反馈方式有着很大的优势,电刺激有着简单易行、轻巧方便、能量的转换效率高、易于集中而且分辨率高以及便于用电脑控制等优点,一直受到国内外研究人员的重视[4]。
所谓电触觉的产生,就是通过脉冲方式进行刺激,在此过程中改变刺激的电压(恒压式刺激)、电流(恒流式刺激)的参数,如电脉冲的频率、幅值、脉宽以及脉冲方向等。同时也会考虑改变电极大小、电极材料以及在电刺激过程中皮肤与电极的接触力,还有刺激手指的位置、厚度以及水合作用等[5],让人在电刺激过程中能够产生振动感、压力感、粗糙感、刺痛感等感觉信息。主要的刺激位置集中在人体的皮肤、舌头以及手指等部位,特别是舌头和手指尖部位的机械感受器分布密集[6],电脉冲刺激该处能产生强烈的感觉。
下面是讨论人体皮肤触觉的生理学基础,详细介绍了3种机械感受器的功能;然后对神经建立模型并进行仿真,找到最优的刺激皮下3种机械感受器的实验模式;最后通过基于手指的电触觉心理物理学实验来验证该模型的正确性,并探讨了电触觉在手臂上的应用。
1 皮肤电刺激生理学
在人体的皮肤内,大约每平方厘米就有200多个感觉神经末梢[7],因此而形成了各种各样的感受器,这些感受器能够感觉外部世界的刺激,如接触、压迫、冷热和疼痛等。触-压觉产生的最主要的原因是外部环境造成了皮肤的变形,不管是轻微的还是较重的变形。皮肤的变形造成了皮肤内部机械感受器的变形,导致动作电位的产生,传递到大脑的感知皮层从而产生了感觉。
人体中的机械感受器主要分为两种:慢适应型感受器和快适应型感受器,这两者又可以分为Ⅰ型和Ⅱ型,主要取决于该感受器在皮肤中所处的位置和分布。一般在研究触觉的过程中,主要研究Meissner触觉小体、Pacinian环层小体以及Merkel触盘对皮肤外部刺激的反应,其生理学参数如表1所示。Kajimoto等称这3种机械感受器为感觉三基色(tactile primary colors)[8],认为这3种机械感受器就像自然界中的红、绿、蓝三基色一样组合起来,可以形成人体丰富的感觉。如果机械感受器的组合出现问题,人就像患有色盲症一样,只能体验很简单的感觉。
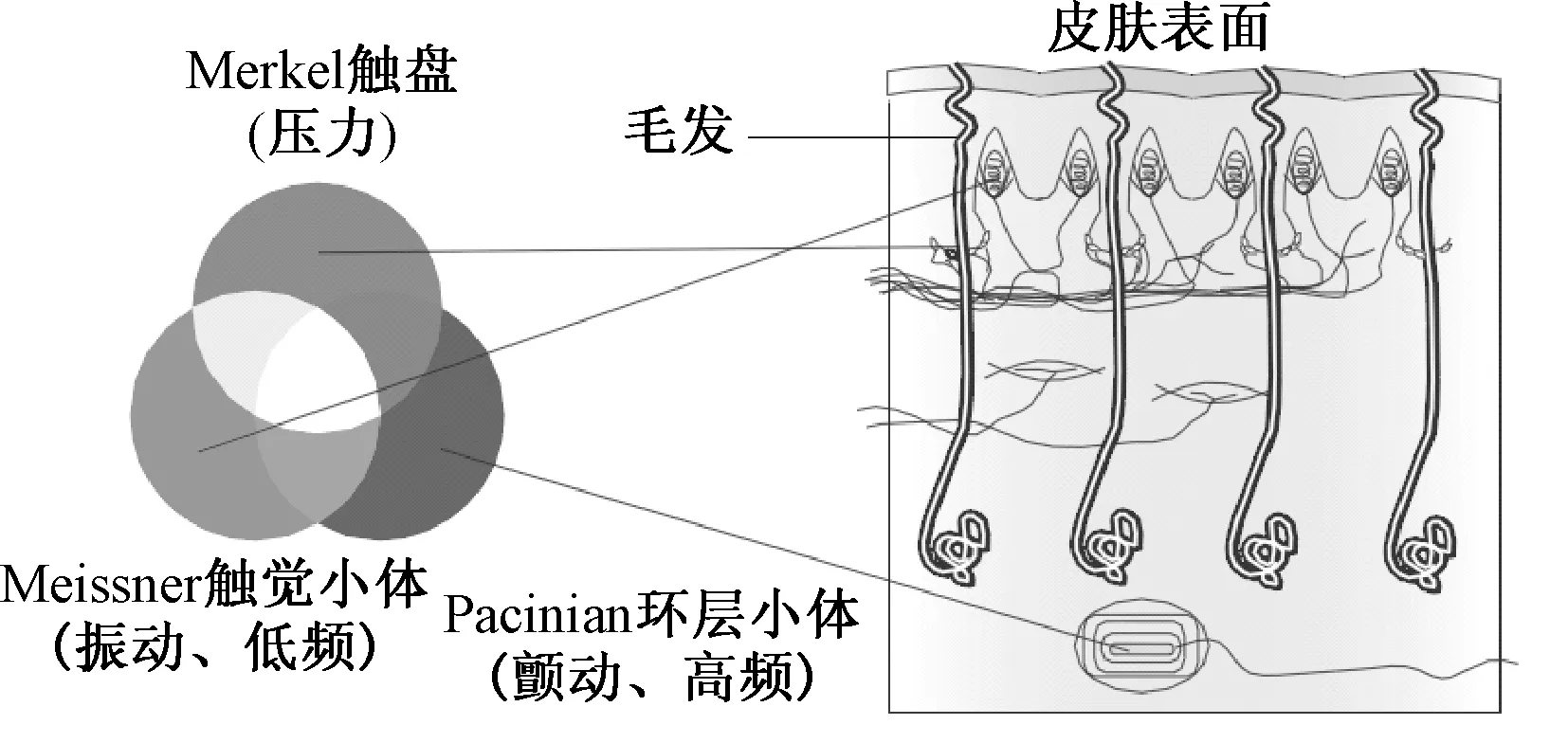
图1 触觉小体、环层小体以及触盘在人体皮肤下组织里面的分布,3种机械振动感受器就像三基色一样结合起来组织成人的多样触觉感[8]Fig. 1 The schematic distribution of Meissner, Pacinian and Merkel under human’s skin which combine together to form various sensations like three primary colors[8]
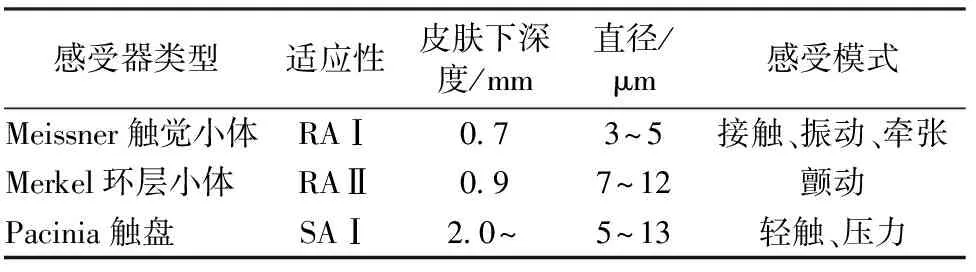
表1 3种机械感受器的具体参数[10]
2 皮肤神经模型及仿真
2.1皮肤神经建模
物理刺激能够直接刺激人体的感受器,从而导致动作电位能传输到中枢神经系统。与物理刺激不一样,电刺激能够直接将机械感受器的膜去极化,从而产生相应的动作电位。所以理论上来说,电刺激如果能分别刺激到相应的神经,就能产生各种各样的感觉。当电压施加到皮肤表面时,在皮下组织产生的电势能直接刺激神经纤维,从而产生机械触感[11-12]。
神经的模型如图2所示,模型的建立基于以下假设[13]:1)神经元的等效电路是二维的,并且主要包括轴突的轴向电阻、膜的电阻、静电位以及电容,轴突方向为x轴,另外一个方向为z轴;2)电流方向也是两维的;3)郎氏节在x轴方向是均匀分布的;4)轴突和膜是被动的,即图中的电阻和电容不会随着电压的变化而变化;5)神经分布在绝对均匀、导电的介质中。
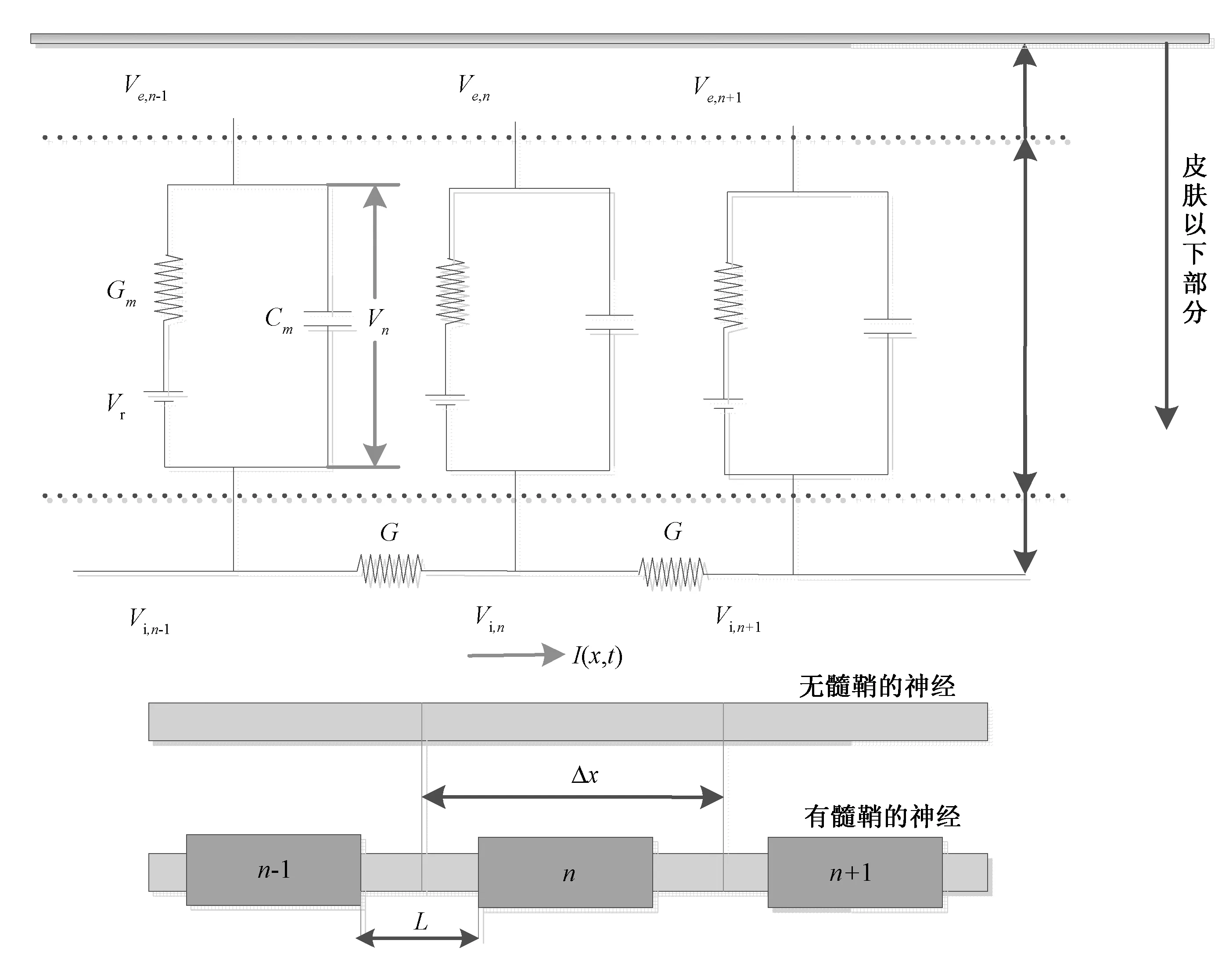
图2 皮肤神经的等效电路图Fig.2 The equivalent circuit diagram for cutaneous nerve

(1)
(2)

(3)
式中,ρi为膜内电导率,cm为单位面积内膜的等效电容,ii,n为单位面积内膜内的电子流密度。由式(3)可以看到,神经外电流源的影响为
(4)

(5)
式(5)为Rattay所揭示的激励函数[14],可以看到动作电位的产生主要是受电流的大小以及神经在皮下的深度这两个因素影响。
3 心理物理学实验
实验主要分两组,一组为正脉冲,一组为负脉冲,电脑随机分别产生4种不同的电刺激频率(振动感觉)或脉宽(压力感觉)。按空格键开始,显示器会出现十字架,受试者按照感受到的刺激根据1~4级来划分并按下相应的键盘,电脑会自动记录受试者的真实刺激级别和感受到的级别。每组实验共有40次刺激,其实验演示如图6所示。正脉冲采用的改变频率定脉宽的方式,频率有10、30、70、90 Hz,脉宽都为200 μs,幅值为2 mA,定义的振动感强度为1~4。在实验过程中,实验者表示振动感由弱到强。负脉冲采用的是改脉宽定频率的方式,频率为100 Hz,脉宽分别为150、200、250、300 μs。在实验过程中,实验者感受到的压力感由弱到强。
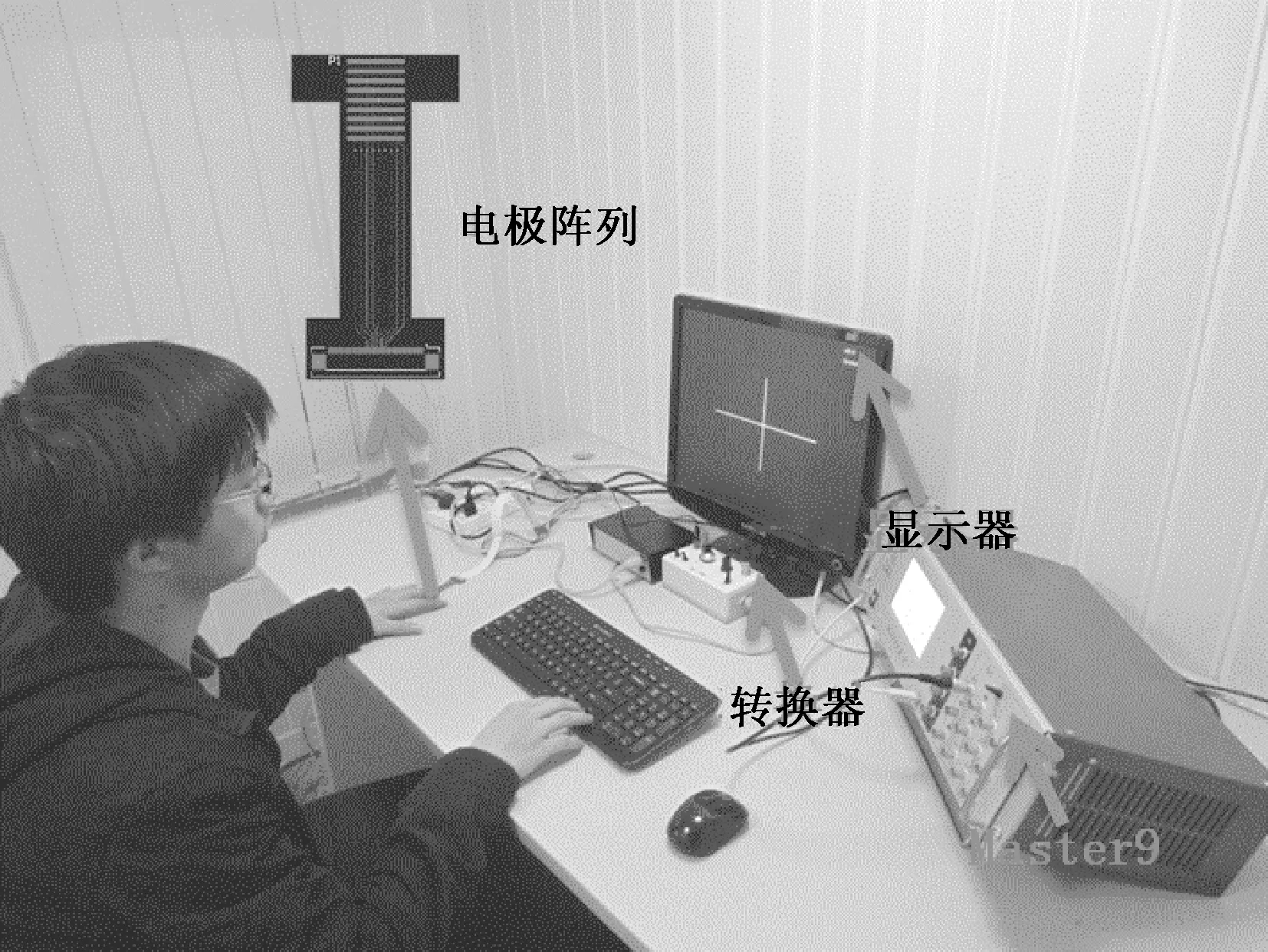
图3 受试者实验演示Fig.3 Demonstration of a subject taking experiment
4 结果
4.1皮肤神经仿真结果
3种机械感受器距皮肤表面的距离参照表1,分别为0.7、0.9、2 mm。轴突的方向和深度对电刺激的激励函数有着非常重要的意义。但是,在以往的论文里面很少有提及每个机械感受器轴突的方向,笔者可以做出一些简单的推论及假设。首先是Meissner触觉小体的轴突分支是由表面皮肤神经上升到表皮的,所以认为在手指处特别是在接近皮肤表面的地方,Meissner触觉小体相对于皮肤表面是垂直的。Merkel触盘以及Pacinian环层小体还未有文献表明它的方向如何,但是在文献[19]中都显示了两者是水平于皮肤表面的,所以在本文中也做出该假设。
在图4中,显示了单电极正电流刺激3种机械感受器的激励函数的仿真结果。结果表明,在正电流的刺激下,电流主要能刺激到Meissner触觉小体,但是同样也能刺激到Merkel触盘以及Pacinian环层小体。由于两者的幅值较小,所以有理由认为在正电流幅值较小的情况下,该实验范式能刺激到Meissner触觉小体,从而产生相应的低频振动感。同样的道理,在负电流的情况下,图4的结果会正负颠倒过来,主要能刺激到的是Merkel触盘,能产生相应的压力感,HiroyukiKajimoto等人将该刺激模式称为RA模式[10]。
多极正电流刺激以及和仿真结果如图5所示,3种机械感受器都受到了刺激。负电流刺激的时候不仅能刺激到Merkel触盘,同时也能刺激到Meissner触觉小体,并且刺激强度比较大。相对于Meissner触觉小体以及Merkel触盘,Pacinian环层小体的刺激幅值较单电极刺激的幅值变大,也就是说,Pacinian环层小体在多电极刺激的时候得到了稍微的增强,该刺激模式被称为PC模式[10]。目前沿无法通过实验来证明该现象是否准确,因为Pacinian环层小体出现的高频振动感会和Merkel触盘出现的压力感混淆,让人无法区分。
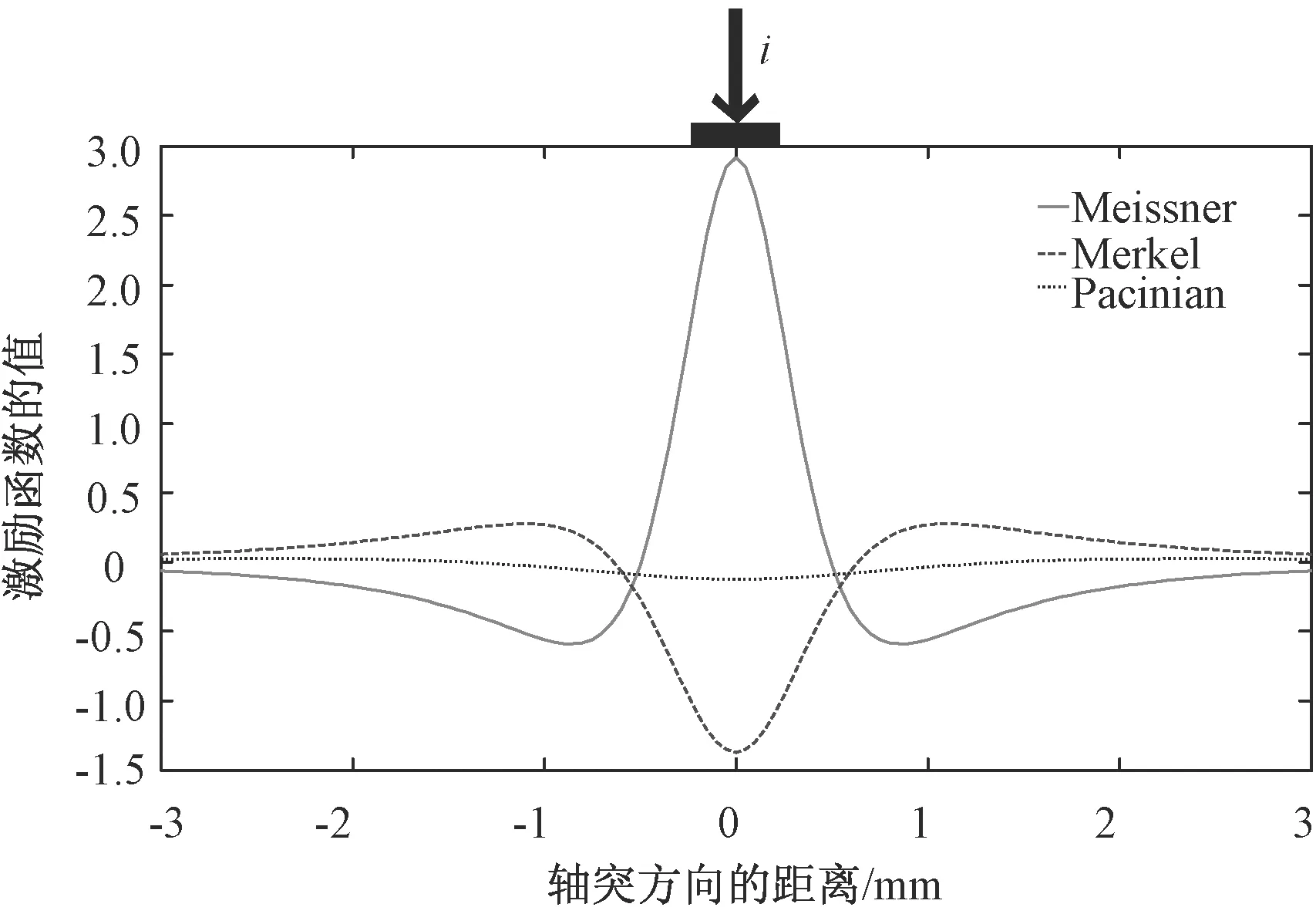
图4 单正极电极刺激下的激励函数的值Fig.4 Value of stimulation function under single positive electrode
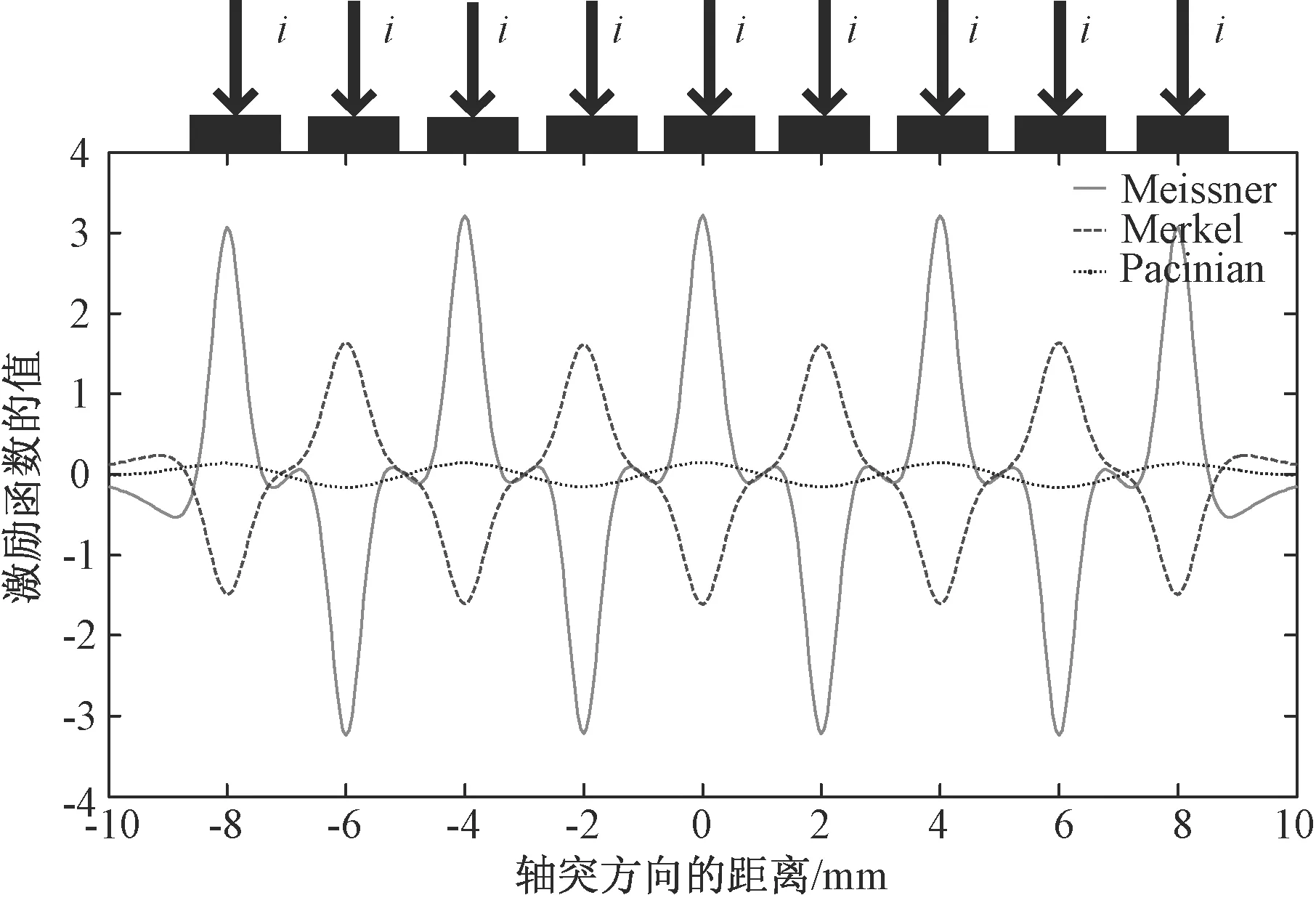
图5 多正极电极刺激下的激励函数的值Fig.5 Value of stimulation function under multiple positive electrodes
图6显示了正负电流多电极阵列刺激时激励函数的变化。可以明显发现,Merkel触盘的最大激励函数的值明显增大,而且与Meissner触觉小体最大激励函数的比值约为3,比前面两个范式都要好。同时,对于负电流来说,Meissner触觉小体最大激励函数值与Merkel触盘的最大激励函数值的比例为10。这就说明,采用带有权重的电极阵列要比单电极或相同电流的电极阵列要好很多。
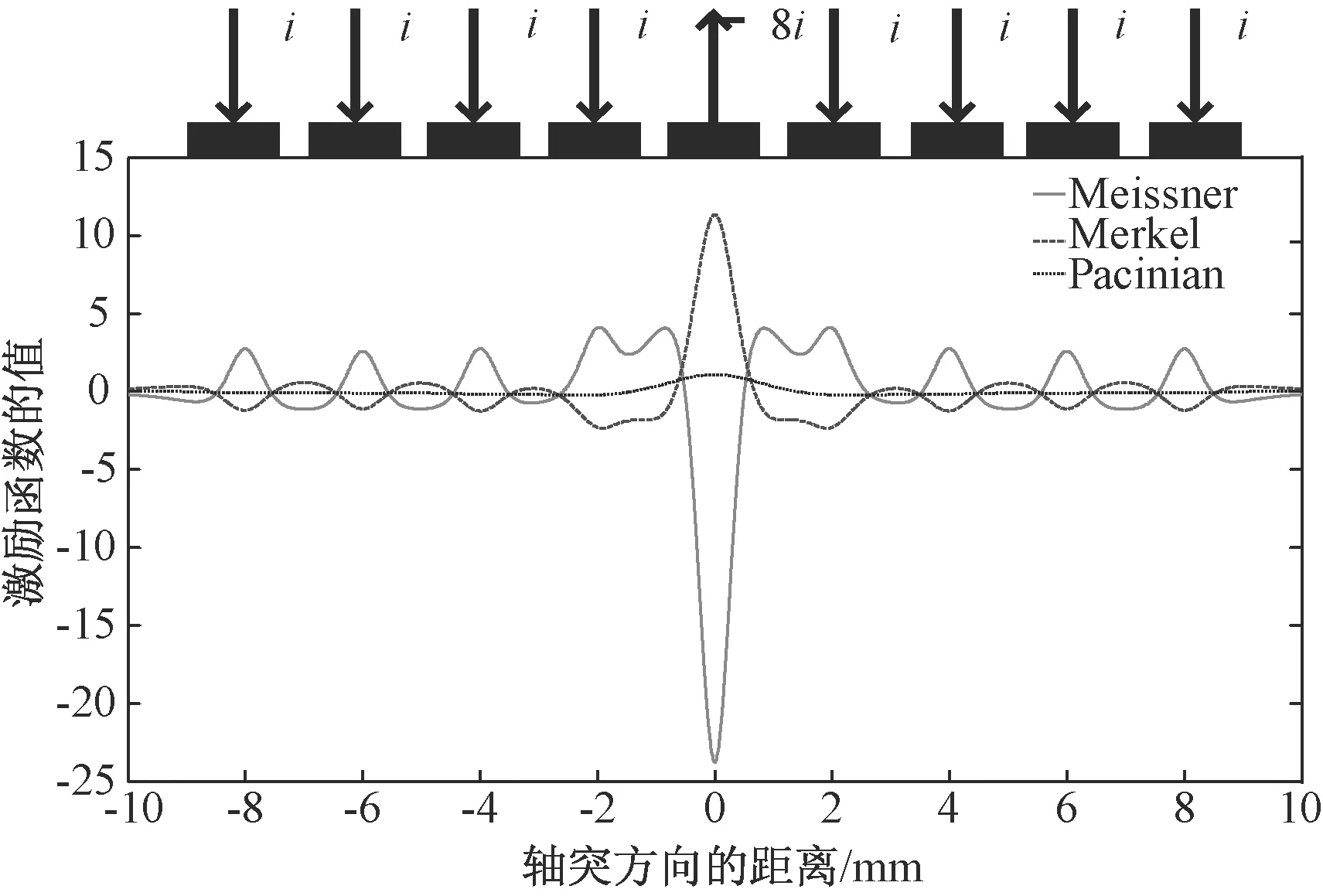
图6 正负电极刺激下的激励函数的值Fig.6 Value of stimulation function under cathodes and anodes
由上面的仿真结果可以看出,激励函数给实验者在电极排布以及电流大小分布从而影响感觉上提供了重要的指导思路。该模型能一定程度上解释受试者在实际皮肤表面电刺激时的感觉,但缺乏电刺激参数(频率、脉宽等)对感觉影响的解释。
4.2心理物理学实验结果
图7显示了正负脉冲在4种分级强度上受试者辨别的正确率。对于正脉冲来说,在10和30 Hz的区分度比较高,70和90 Hz的区分度较低,都在50%左右,两者的感觉容易混淆。这就验证了本文2节的仿真结果,即正脉冲能够刺激Meissner触觉小体,而该机械感受器只能感受低频的振动,超过60 Hz就很难区分。
对于负脉冲来说,每个刺激的区分度都比较高,不同脉宽之间引发的感觉判断错误基本都是由于相邻两个脉宽之间无法区分而引起的。受试者在负脉冲的刺激下都产生了压力感,这也验证了负脉冲主要刺激的是Merkel触盘,该机械感受器相对于静态的刺激来说更敏感,要比动态的刺激敏感10倍,在一定的脉宽范围内,不同脉宽刺激引起的感觉是可以区分的。
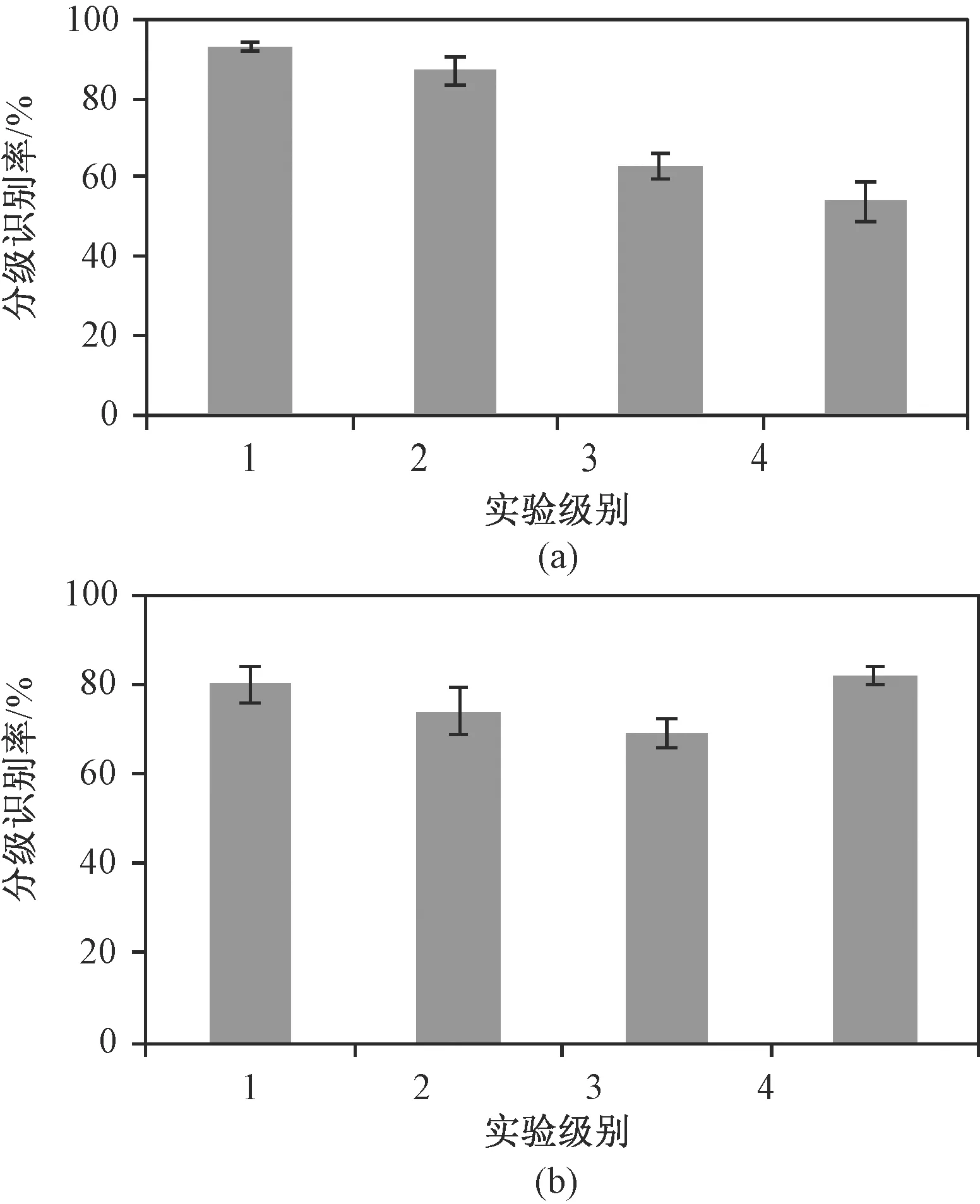
图7 分级实验的识别率。(a)振动感觉分级识别率;(b)压力感觉分级识别率Fig.7 The accuracy of classification experiment (a) Classification accuracy of vibration feeling (b) Classification accuracy of pressure feeling
5 讨论和结论
本课题只研究了振动感和压力感,因为其他触觉(如粗糙度、滑觉和摩擦感等)可以通过这两种感觉的组合得以实现,也就是在时间-空间上控制电脉冲刺激的模式来集合生成[15]。以滑觉为例,可以通过在时间序列上安排电刺激,即可以通过在电极位置上依次循环刺激,让实验者能够产生相应的滑觉以及不同方向的压力感。针对触觉,现有的机械义肢或者机械手上可以安装压力传感器以及振动传感器,通过这两种传感器,将电流脉冲编码转换成相应的压力和振动来还原真实的环境信息。
综上所述,本研究的电触觉技术未来可以在高端假肢上得到应用,即通过采集机械假肢上传感器的信息,将所有的传感器信号转换成相应的电刺激信号,对人体上臂皮肤表面进行刺激。事实上,在上臂上进行刺激和在手指上刺激的感觉效果比较相似,只是手臂上的空间分辨率要差很多,意味着电极之间的位置要较大。而且,电极也要考虑导电性更好的材质,如湿电极或者Ag/AgCl电极等。同时,如果能刺激到手臂上的桡神经、正中神经以及尺骨神经,就能产生相应的感觉转移现象。也就是说,电刺激上臂可以在手指处产生相应的感觉,即使是相对于截肢患者也有同样的效果,只是在手臂上相关的神经都被肌肉包围,很难被刺激到。带有电刺激的机械假肢不仅能够使截肢患者能够更好地操作假肢,而且能够在一定程度上减少患肢痛[16]。同时也有证据表明,如果机械假肢带有一定的触觉和关节角度信息的反馈,则能够在一定程度上提高截肢患者对机械假肢的接受度[17-18]。
本课题主要进行了基于电触觉的皮肤神经模型的仿真和验证,通过生理学和实验相结合的方式,解释了人在皮肤表面电刺激的时候产生的振动感和压力感。实验表明,在一定的刺激参数范围内,电刺激产生的振动感和压力感可以达到很高的区分度。
[1] Herbst I, Stark J. Comparing force magnitudes by means of vibro-tactile, auditory, and visualfeedback [C]//IEEE International Workshop onHaptic Audio Visual Environments and their Applications (HAVE).Ottawa: IEEE, 2005: 67-71.
[2] Oliveri M,Rossini PM,Filippi MM,etal.Time-dependent activation of parieto-frontal networks for directing attention to tactile space: A study with paired transcranial magnetic stimulation pulses in right-brain- damaged patients with extinction [J]. Brain,2000,123: 1939-1947.
[3] Connor CE, Johnson KO. Neural coding of tactile texture: Comparison of spatial and temporal mechanisms for roughness perception [J]. The Journal of Neuroscience, 1992,12(9): 3414-3426.
[4] 金世俊, 黄惟一. 表面电极下的电触觉模型研究[J].东南大学学报, 1997,27(6): 1-5.
[5] 金世俊, 宋爱国. 遥作机器人触觉临场感的电触觉实现 [J]. 机器人, 1997,19(5):333-337.
[6] Lederman SJ. Skin and touch [J]. Encyclopedia of Human Biology, 1991,7:51-63.
[7] 汪成为. 人类认识世界的帮手——虚拟现实 [M]. 北京: 清华出版社, 2000.
[8] Kajimoto H, Kawakami N. SmartTouch: electric skin to touch the untouchable [J]. IEEE Computer Graphics and Applications, 2004,24(1):36-43.
[9] 茹立强, 殷光甫, 王才源. 神经科学基础 [M]. 北京: 清华大学出版社, 2004.
[10] Kajimoto H, Kawakami N, Maeda T,etal. Tactile feeling display using functional electricalstimulation [C]//Proceeding of 9th International Conference on Artificial Reality and Telexistence (ICAT 99).Tokyo: The Virtue Reality Society of Japan,1999:107-114.
[11] Ayaraman A,Kaczmarek KA, Tyler ME,etal. Effect of localized ambient humidity on electrotactile skin resistance [C]//IEEE Annual Northeast Bioengineering Conference. New York:IEEE, 2007:110-111.
[12] Okpara UO,Kaczmarek KA, Tyler ME.Two perceptual dimensions result from manipulating electrotactile current and frequency [C]//IEEE Annual Northeast Bioengineering Conference.New York:IEEE, 2007:152-153.
[13] Rubinstein JT. Analytical theory for extracellular electrical stimulation of nerve with focal electrodes II. passivemyelinated axon [J]. Biophysical Journal, 1991,60(3): 538-555.
[14] Rattay F. Analysis of models for external stimulation of axons [J]. IEEE Transaction on Biomedical Engineering, 1986,33(10): 974-977.
[15] Konyo M, Yoshida A. A tactile synthesis method using multiple frequency vibrations for representing virtual touch [C]//IEEE RSJ International Conference onIntelligent Robots and Systems. Edmonton:IEEE, 2005: 3965-3971.
[16] Yoshimoto S, Kuroda Y, Imura M,etal. Development of a spatially transparent electrotactile display and its performance in grip force control[C]//Annual International Conference of the IEEE Engineering in Medicine and Biology Society(EMBC).Boston:IEEE, 2011: 3463-3466.
[17] Katrin W, Thomas W, Dorothee S,etal.Spatial discrimination learning of electrocutaneous stimuli isinfluenced by the type of stimulation [J]. Brain Research, 2009,1281:47-55.
[18] Dhillon GS, Horch KW. Direct neural sensory feedback and control of a prosthetic arm[J]. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2005,13(4): 468-472.
[19] Iggo A. Sensory Receptors in the skin of mammalsand their sensory functions [J]. Revue Neurologique(Paris).1985,141(10): 599-613.
StimulationandExperimentalVerificationonCutaneousNervousMechanismofElectrotactileFeeling
XU Fei ZHANG Ding-Guo*XU Heng
(SchoolofMechanicalEngineering,ShanghaiJiaoTongUniversity,Shanghai200240,China)
Nowadays, haptics has been widely used in many fields such as telecontrol robots, surgical robots, prosthesis, entertainment interface and virtual reality, which has improved the operability of actual or virtual objects for human. Electrotactile stimulation is a main technique to reproduce tactile sensation by changing the frequency, duration, amplitude, direction and distribution of constant-current electrical pulses. In this article, a model of cutaneous nerves under electrical stimulation was developed to serve for simulation study, and stimulation function was deduced based on the model. With the simulation, optimal paradigms for stimulating three mechanoreceptors (Meissner’s corpuscle, Merkel’s disc and Pancinian corpuscle) were separately found in a trial-and-error way, i.e. by changing the direction and amplitude of electrical pulses in arrays through simulation study. Furthermore, psychophysical experiments were carried out to make 10 experimenters sense two kinds of feelings (vibration and pressure). The targeting area for electrotactile stimulation was on the index fingers. For vibration feeling, positive electrical pulses of different frequencies(10,30,70,90 Hz)were applied; For pressure feeling, negative electrical pulses of different widths(150、200、250、300 μs)were applied. The subjects gave their subjective judgment on the grade of the feeling generated by electrical stimulation.Statistical results showed that the averaged recognition rate of two sensations under the help of the model reached higher than 80%. The model is helpful in finding the best stimulation pattern and assuring the realization of optimal reproduction of tactile sensation.
haptics; electrotactile; electrical stimulation; cutaneous nerves; psychophysical experiment
10.3969/j.issn.0258-8021. 2014. 01.004
2013-03-15, 录用日期:2013-12-06
国家重点基础研究发展计划(973计划)(2011CB013305);国家自然科学基金(51075265)
R318
A
0258-8021(2014) 01-0022-06
*通信作者。E-mail: dgzhang@sjtu.edu.cn