基于风剪效应的独立变桨控制对漂浮式风力发电机性能的影响
2014-08-08谢双义金鑫
谢双义,金鑫
(1. 重庆公共运输职业学院,重庆市 402247; 2. 机械传动国家重点实验室(重庆大学),重庆市 400030)
基于风剪效应的独立变桨控制对漂浮式风力发电机性能的影响
谢双义1,金鑫2
(1. 重庆公共运输职业学院,重庆市 402247; 2. 机械传动国家重点实验室(重庆大学),重庆市 400030)
随着风力发电机塔架高度以及叶片尺寸的增大,风剪效应对风力发电机性能的影响越来越显著,为此提出了基于风剪效应的独立变桨控制策略。分析了漂浮式风力发电机支撑结构的动力学模型,结合针对陆上风力发电机提出的基于风剪效应的独立变桨控制策略,并使用线性二次型调节技术(linear quadratic regulator, LQR)分别对3种漂浮式风力发电机的独立变桨控制器进行了设计,在Matlab/Simulink软件中搭建仿真模型并与Fast软件进行联合仿真。仿真结果表明:所采用的独立变桨控制策略对3种形式的风力发电机的功率、纵摇运动影响并不相同。独立变桨控制策略可以明显降低单柱式风力发电机的功率波动,但对张力腿式和驳船式风力发电机来说效果不明显甚至变得更差;而对于漂浮式风力发电机的纵摇运动来说,独立变桨和统一变桨控制策略对单柱式和张力腿式风力发电机的影响差别不明显,而对驳船式风力发电机来说,独立变桨控制策略使其纵摇角度变得更大。
独立变桨;风剪;漂浮式风力发电机;状态估计器;线性二次型调节器(LQR)
0 引 言
风力发电机处于自然工作环境,风剪效应不可避免[1],使得风力发电机的工作环境并不稳定[2]。随着风力发电机功率的逐渐增大,叶轮直径也随之增大,从而风剪效应也越来越不可忽视[3-5]。
现有的研究主要针对陆上风力发电机,而对于海上风力发电机特别是采用独立变桨控制方法的研究并不多。鲁效平等基于专家比例积分微分(proportion integration differentiation,PID)控制器,利用d-q坐标变换技术设计了独立变桨控制器[6],此控制策略能较好地控制平台纵摇角,对功率的波动影响也较小,但控制策略相对复杂。程晓勇等针对海上双叶片风力发电机进行了研究,设计了以三环PID控制原理为核心,直流电动机为伺服电机的独立变桨控制系统,该系统能使叶片变桨正常工作,为海上风力发电机的进一步设计提供了经验与支持,但对于三叶片的风力发电机的实用性还需进一步验证[7]。Wright A D等基于风剪效应对陆上风力发电机的独立变桨控制策略进行了研究[8],该控制策略针对陆上风力发电机,能很好降低风力发电机关键部位的载荷。相对于陆地来说,虽然海面的风剪系数较小,但由于现代风力发电机的单机功率逐渐趋于大型化,随之叶轮直径也逐渐加大,叶片旋转至最低处与最高处的风速差仍然很大,因此考虑海面上的风剪效应仍具有一定的价值。
本文借助美国可再生能源室提供的3种漂浮式风力发电机模型,分析了风剪作用对风力发电机性能的影响,在考虑风速扰动的前提下使用线性二次型调节(linear quadratic regulator, LQR)技术设计了独立变桨控制器,并分别对3种形式的漂浮式风力发电机进行仿真,最后将仿真结果与统一变桨控制策略下的结果进行了比较。
1 漂浮式风力发电机模型
在我国海岸线上,水深超过30 m的地方蕴藏着大量的风能。当水深由浅入深时,风力发电机的基础结构逐渐由固定式转为漂浮式,如图1[9]所示。在没有进行动力学分析的情况下,Musial等证明了漂浮式平台设计的经济潜力[10]。漂浮式的支撑结构可以设计成多种结构:单柱式、张力腿式以及驳船式,如图2所示。对于单柱式支撑结构来说,可以使用绳缆使其固定,并用压仓物使其质心低于浮心从而保持稳定;对于张力腿式支撑结构来说,可以通过箱体的浮力以及缆绳的张力来使其保持稳定;而对于驳船式支撑结构来说,可以通过缆绳使其固定并通过与其接触的水面区域来达到稳定[11]。因为海上石油天然气行业已经证明了漂浮式支撑结构可以长时间使用,因此开发漂浮式风力发电机的基础支撑结构在技术可行性上是不存在问题的。

图1 风力发电机基础结构随水深增加时的设计变化

图2 3种漂浮式平台
2 漂浮式支撑结构动力学模型
漂浮式支撑结构一般可分为2部分:支撑风力发电机主要部件的漂浮式平台以及由缆绳组成的系泊系统。
2.1 漂浮式平台的动力学模型
通常来说漂浮式平台的动力学问题可以分成3个部分:辐射问题、绕射问题以及水静力学问题[12-13]。
2.1.1 辐射问题
辐射问题是指假设不考虑入射波的影响,漂浮式支撑结构在不同模式的振荡下产生的一系列辐射波浪,该辐射波浪对漂浮式支撑结构产生的作用力为
(1)

2.1.2 绕射问题
绕射问题所研究的是当入射波浪作用在固定式平台上时对其产生的载荷影响。实际上,真实的波浪可以看成是一系列具有不同相位和振幅的线性波叠加之后形成的随机非线性波,这些波在某个特定点处引起的波浪运动称为高斯随机运动,一般情况下采用统计学方法进行分析。目前来说,通常采用Pierson-Moskowitz波浪振幅谱和Jonswap波浪振幅谱[12-13]来描述这种高斯随机运动。
2.1.3 水静力学问题
水静力学问题就是浮力问题,研究的是当平台在不受任何波浪力作用时其所受的浮力:
(2)
式中:ρ为海水密度;g为重力加速度;V0为平台所排开的水的体积;δi3为 Kronecker-Delta函数;CHyij为 海平面与平台的浮心之间的刚度矩阵。
2.2 系泊系统力学模型
系泊系统主要是由一些连接漂浮式平台和海底的绳缆组成。对系泊缆绳施加一定的预张力,使其处于半张紧状态并在自身重力的作用下成悬链状[1]。假设系泊系统是线性的,则缆绳的力学表达式为
FLinesi=FLinesi0-CLinesijqj
(3)
式中:FLinesi0表示系泊系统对漂浮式平台作用力的合力;CLinesij表示缆绳的刚度矩阵。
3 控制策略
当风速高于额定风速时,风力发电机的控制目标除了要保持电机功率稳定在额定值外,在独立变桨控制器中新增的功能就是通过叶片的独立变桨来降低非对称风对风力发电机的影响,在独立变桨控制器中仍然含有统一变桨成分,这样可以降低均匀风扰动的影响以及对叶轮转速进行调节。Wright A D等[14]基于风剪切效应对陆上风力发电机的影响做了独立变桨控制的研究,文中使用类似的方法对漂浮式风力发电机的独立变桨控制进行研究。
3.1 风剪效应模型
风剪效应是指当风距离地面的高度发生变化时风速也发生变化的情形。风速发生变化的快慢与地面的粗糙度大小有关,即与风剪系数的大小有关。相比于陆地,海面上的风剪系数值要小一些,一般取1/7[15]。但对于文中研究的3种5 MW容量的漂浮式风力发电机来说,由于其叶轮直径比较大,约为126 m,以18 m/s的风速来计算,叶片在最低处与最高处时的风速差仍达到2 m/s左右,因此考虑风剪效应仍有必要。图3为风剪效应模型。

图3 风速在风剪效应下的变化
风剪模型可表示为
V(z)=Vhub(1+z/h)m
(4)
式中:z为在轮毂中心以上的距离;Vhub为位于轮毂中心处的风速值;m为风剪系数。
3.2 独立变桨控制器的设计
采用下面假设的线性时不变系统:

(5)
式中:A对应的是状态矩阵,这里主要是指叶片的一阶拍打位移和速度、电机转速、风速扰动等;B对应的是控制输入矩阵,这里主要是指叶片桨距角;C对应的是输出矩阵,这里主要是指叶尖的拍打位移。目标函数为
(6)
式中:δx(t)对应的是系统的状态;δu(t)对应的是控制输入;Q对应的是表示状态权重的矩阵;R对应的是输入权重矩阵。
对于线性二次型调节控制器Q的值是通过实验来确定的。阶跃风扰动模型一般可用下面的状态空间矩阵形式表示:
(7)


(8)
4 仿真分析
文中所研究的漂浮式风力发电机为美国可再生能源实验室(NREL)提供的5 MW风力发电机组,轮毂高度为90 m,叶轮直径126 m,额定风速为11.4 m/s。
外部激励风和波浪随时间变化的情形如图4、5所示。图6表示的是分别使用独立变桨控制策略和统一变桨控制策略对3种漂浮式风力发电机分别进行仿真时的桨距角对比。从图6可看出:3个叶片独立变桨时相位相差120°,与统一变桨相比,独立变桨的桨距角变化更加频繁,这对执行器提出了更高的要求。

图4 平均风速为18 m/s的湍流风

图5 波浪高度随时间变化的情形
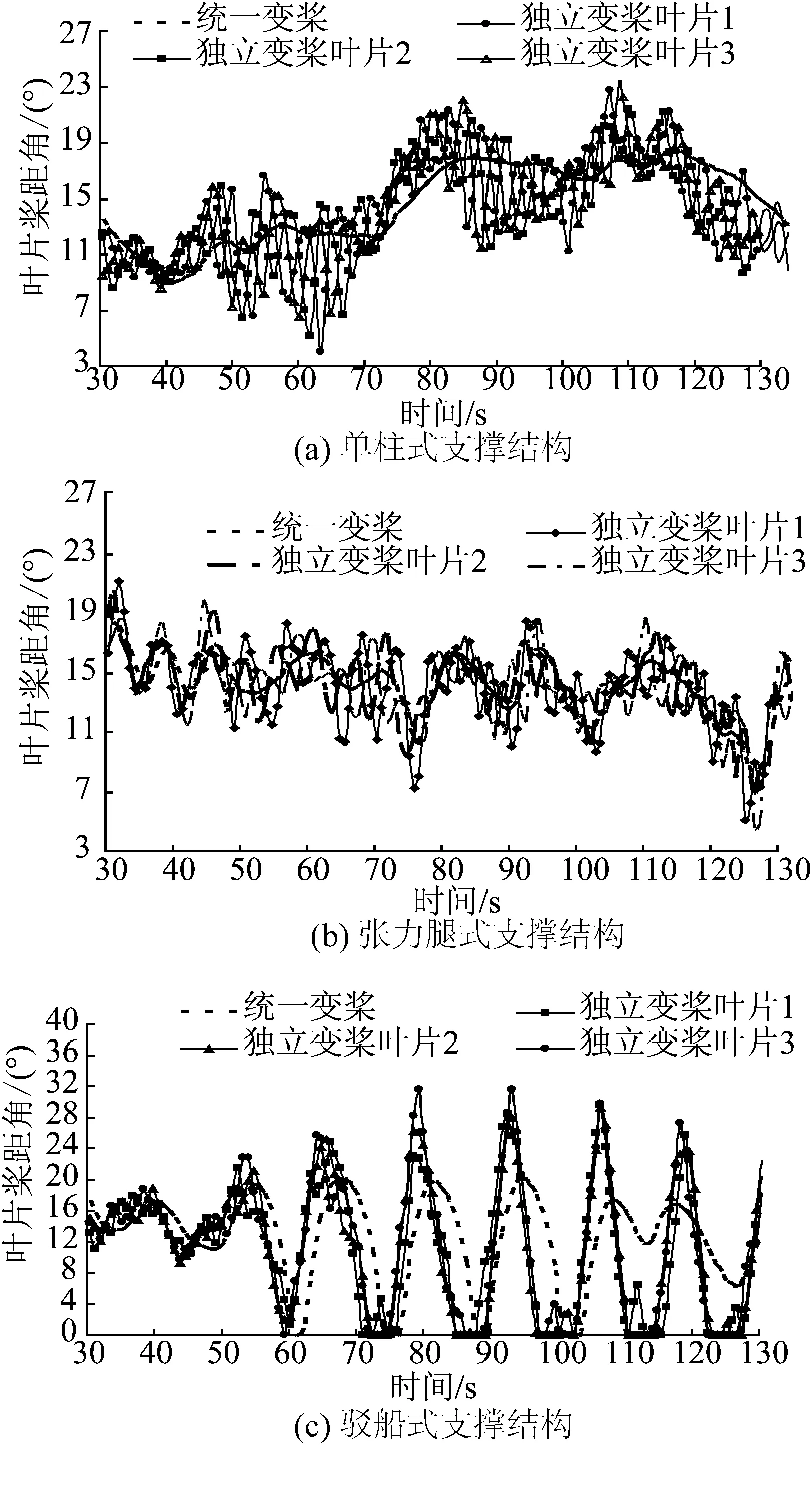
图6 桨距角在独立变桨控制策略和统一变桨控制策略下的仿真情况
图7为分别在独立变桨和统一变桨控制策略下电功率的仿真情况。从图7可看出,对于单柱漂浮式风力发电机来说,独立变桨控制策略可有效降低电功率的波动,对于张力腿式的来说效果则不是很明显,而对于驳船式来说功率波动反而增大。
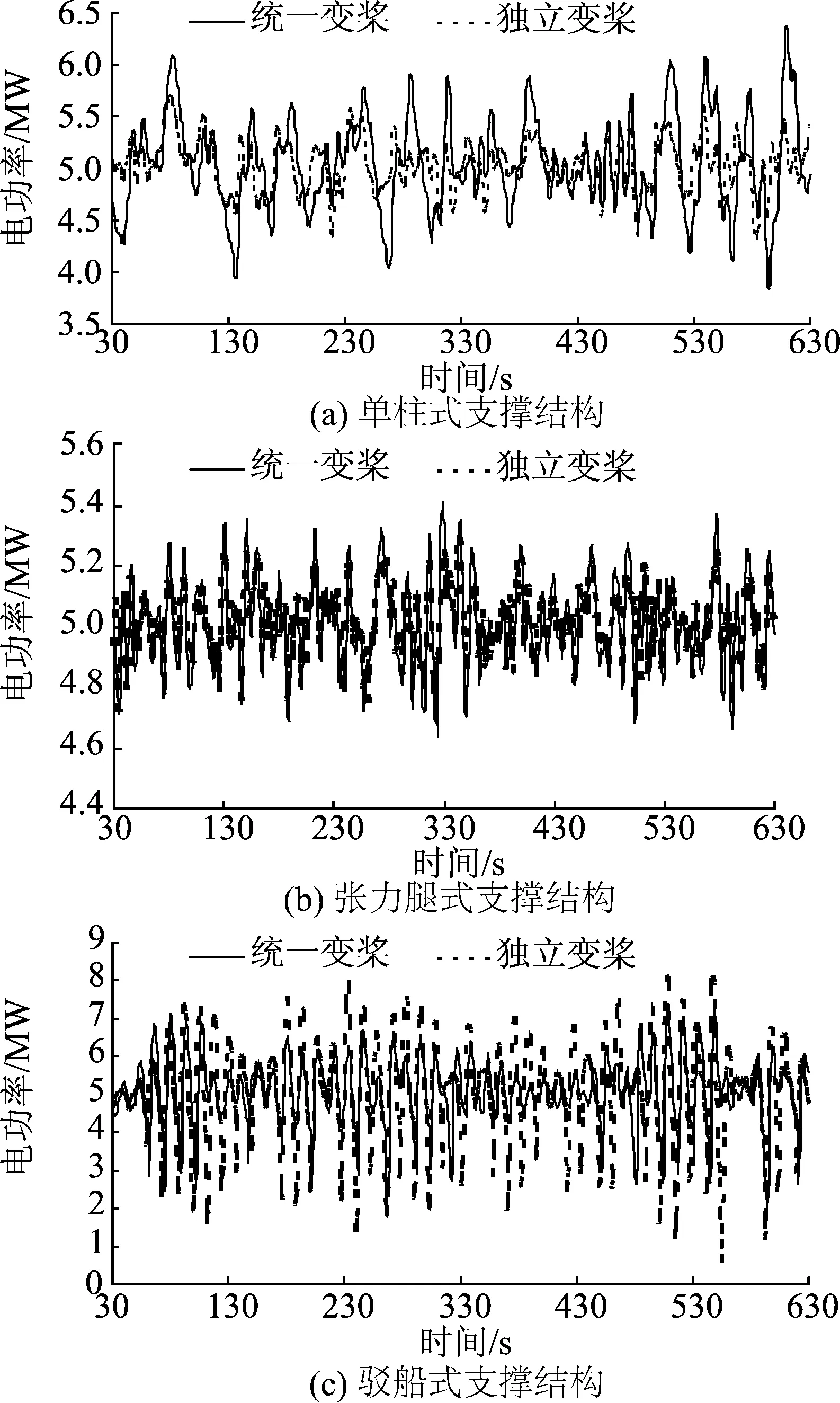
图7 电功率在独立变桨控制策略和统一变桨控制策略下的仿真情况
对于漂浮式风力发电机来说,其平台的运动可以在很大程度上影响风力发电机的疲劳载荷,而漂浮式平台的运动可分为:纵摇、横摇以及艏摇运动,如图8所示,但最主要的是纵摇运动[7]。

图8 漂浮式平台的运动
图9为3种漂浮式平台的纵摇角在独立变桨和统一变桨控制策略下的仿真情况。从图9可看出,对于单柱式和张力腿式的风力发电机来说,这2种控制策略对纵摇角的影响并不大,但对于驳船式风力发电机来说,在独立变桨控制策略下其纵摇角度明显变大。

图9 平台纵摇角在独立变桨控制策略和统一变桨控制策略下的仿真情况
5 结 论
(1)对于单柱式风力发电机来说,独立变桨控制策略可有效降低电功率的波动,对于张力腿式来说效果则不是很明显,而对于驳船式来说功率波动反而增大。
(2)对于单柱式和张力腿式的风力发电机来说,独立变桨和统一变桨控制策略对其的纵摇角影响并不大,但对于驳船式风力发电机来说,在独立变桨控制策略下其纵摇角度明显变大。
(3)对于驳船式漂浮风力发电机来说,这种独立变桨控制策略可能并不适用,还需进一步研究原因并找到可行的解决方法。
[1] Gipe P. Wind power: renewable energy for home, farm and business [D]. Chelsea Green Publishing, 2004.
[2] 周文平,唐胜利,吕红. 风剪切和动态来流对水平轴风力机尾迹和气动性能的影响[J]. 中国电机工程学报, 2012, 33(14): 122-124.
[3] 贺德馨. 风工程与工业空气动力学[M]. 北京:国防工业出版社,2006:9-10.
[4] Hughes F M, Olimpo A L, Pamtharan G, et al. Influence of tower shadow and wind turbulence on the performance of power system stabilizers for DFIG-based wind farms[J]. IEEE Transactions on Energy Conversion, 2008,23(2):519-528.
[5] Datta R, Ranganathan V T. Variable-speed wind power generation using doubly fed wound rotor induction machine a comparison with a alternative schemes[J]. IEEE Transactions on Energy Conversion, 2002,17(2):414-421.
[6] 王磊,何玉林,金鑫,等. 漂浮式海上风电机组动力学仿真分析[J].中南大学学报:自然科学版,2012,43(4): 1309-1314.
[7] 程晓勇. 基于双叶片海上风电机独立变桨控制系统仿真[J]. 能源与节能,2013(8):46-47.
[8] Stol K,Balas M J. Periodic disturbance accommodating control for speed regulation of wind turbines[C]// Proceeding of the 2002 ASME Wind Energy Symposium, Reno, Nevada, 2002: 310-320.
[9] Wright A D,Fingersh L J. Advanced control design for wind turbines part I: Control design, implementation, and initial tests[C]// Energy Ocean Proceedings, Golden, Colorado USA: National Renewable Energy Laboratory, 2008:57-63.
[10] Musial W, Butterfield S, Boone A. Feasibility of floating platform systems for wind turbines[C]// American Institute of Aeronautics and Astronautics, Inc. (AIAA) and American Society of Mechanical Engineers (ASME), Golden, Colorado USA: National Renewable Energy Laboratory. 2004: 5-7.
[11] 鲁效平,李伟,林勇. 漂浮式海上风力发电机组独立变桨距控制技术研究[J]. 太阳能学报,2012, 33(4): 600-608.
[12] Wayman E. Couple dynamics and economic analysis of floating wind turbine systems [D].Civil and environmental engineering Massachusetts Institute of Technology, 2004.
[13] Faltinsen O M. Sea loads on ships and offshore structures[M]. UK: Cambridge University Press, 1999:1-92.
[14] Jonkman J M. Loads analysis of a floating offshore wind turbine using fully coupled simulation [EB/OL]. http://www.nrel.gov/wind/pdfs/41714.pdf.
[15] Watson G, Hill B, Courtney F. A framework for offshore wind energy development in the united states, massachusetts technology collaborative (MTC)[EB/OL]. http://www.mtpc.org/offshore/final_09_20.pdf, [cited 17 November 2005].
(编辑:蒋毅恒)
InfluenceofIndividualPitchControlonFloatingWindTurbinePerformanceBasedonWindShear
XIE Shuangyi1, JIN Xin2
(1. Chongqing Vocational College of Public Transportation, Chongqing 402247, China;2. State Key Laboratory of Mechanical Transmission, Chongqing University, Chongqing 400030, China)
Along with the increases of the tower height and blade size of wind turbine, the influence of wind shear effect on the performance of wind turbine becomes more and more important. Therefore, this paper proposed the individual pitch control strategy based on wind shear effect. The support structure dynamics model of floating wind turbine was analyzed. Combined with the individual pitch control strategy for onshore wind turbine based on wind shear, the individual pitch controllers for three different floating wind turbines were designed with using linear quadratic regulator (LQR) technology. Simulation model was built in MATLAB/SIMULINK software and was co-simulated with FAST software. The simulation results show that the proposed individual pitch control strategy has different influences on the power and pitch motions of these three types wind turbines. The individual control strategy can significantly reduce the power fluctuations of spar-buoy floating wind turbine, but it’s not obvious to tension leg and barge floating wind turbines. For the pitch motion of floating wind turbine, the influences of individual and uniform pitch control strategy on spar-buoy and tension leg floating wind turbines have not obvious differences, but for barge wind turbine, the platform pitch angle will become larger when using individual pitch control strategy.
individual pitch; wind shear; floating wind turbine; state estimator; linear quadratic regulator(LQR)
国家科技支撑计划项目(2009BAA22B02);国家自然科学基金项目(51005255)。
TM 614
: A
: 1000-7229(2014)09-0013-05
10.3969/j.issn.1000-7229.2014.09.003
2014-03-21
:2014-04-25
谢双义(1986),男,硕士,研究方向为风力发电机的控制策略,E-mail:xsy.1986@163.com;
金鑫(1979),男,博士,副教授,从事风力发电技术研究工作。
