基于蚁群神经网络的工业自动化PID参数优化❋
2014-08-07孙琼琼郭静博
孙琼琼,郭静博
(平顶山教育学院,平顶山467000)
基于蚁群神经网络的工业自动化PID参数优化❋
孙琼琼,郭静博
(平顶山教育学院,平顶山467000)
针对常规方法无法获得最优PID控制器参数的缺点,提出一种基于蚁群神经网络的PID控制器参数优化方法(ACO-RBFNN)。ACO-RBFNN将PID控制器的3个参数作为RBF神经网络的输入,系统输出为RBF神经网络期望输出,通过蚁群算法对RBF神经网络的参数进行优化,并通过RBF神经网络构造参数自学习的PID控制器,从而实现PID控制器参数在线优化。仿真实验结果表明,基于ACO-RBFNN的PID控制器可以得到令人满意的控制效果,可以应用于工业自动化控制系统的PID控制器参数优化。
PID控制器;参数优化;蚁群算法;神经网络
1 引 言
PID控制器具有结构简单、可靠性高、鲁棒性强等优点,有比较完善的理论体系,在电力冶金、机械等工业自动化控制领域得到了广泛应用[1]。对于PID控制器来说,最核心的问题是如何优化比例系数、微分时间、积分时间等3个参数,使PID控制系统控制效果最佳,因此PID控制器参数优化一直是工业自动化控制领域的热点[2]。
目前传统PID控制器参数优化方法主要有专家法、Z-N法和单纯形法[3-5]。专家法与经验知识直接相关,且需要整理和更新专家知识库;Z-N法是由Ziggler和Nichols于20世纪40年代初提出的一种PID控制算法,该控制算法简单、易实现,但对于相对大的时间滞后对象需采取专门的补偿措施,因此通过此算法设计的PID控制器超调量较大且抗干扰能力弱。超调量大,对于控制品质要求较高的场合,一般很难满足要求。单纯形法具有操作简单,计算量小等优点,对寻优参数的初值很敏感,初值不当,可能导致寻优结果失败。因此这些传统PID控制参数优化方法均存在各自的不足,有一定的局限性,尤其对于具有时变性、时滞性的工业自动化控制系统,难以建立精确的数学模型,控制效果不理想[6]。随着人工智能技术的发展,以神经网络为代表的非线性方法为PID控制器参数优化提供了新的空间,其中径向基函(RBF)神经网络具有自适应学习、鲁棒性强等优点,在PID控制器优化中应用最多[7]。基于RBF神经网络的PID控制器性能与其参数密切相关,当RBF神经网络参数选择不当时,易出现局部极值,收敛速度慢等缺陷。当前解决此问题的方法主要有:梯度下降算法、遗传算法、粒子群算法等。梯度下降算法搜索时间长,遗传算法、粒子群优化算法是启发式算法,均存在各自不同程度的缺陷,影响RBF神经网络在工业自动化控制系统中的应用[8]。蚁群优化算法(ACO)是一种集体智能算法,运用了正反馈、分布式计算和贪婪启发式搜索,在求车间作业调度、网络路由、背包问题等领域取得较好的优化效果[9]。
针对RBF神经网络在PID控制器参数优化过程中存在我不足,为了提高了工业控制系统控制效果,提出一种基于蚁群神经的PID控制器参数优化方法(ACO-RBFNN),并进行仿真实验。结果表明,ACO-RBFNN可以获得全局最优PID控制器参数,取得了令人满意的控制效果。
2 PID控制器数学模型
现代工业控制系统中的PID控制器结构如图1所示。

图1 PID控制器系统结构
PID控制器包括被控对象和模拟PID控制器两部分,其控制规律为:

其中,Ti是积分系数;Td是微分系数;Kp是比例系数[10]。
现代PID控制器是数字式,因此对式(1)进行离散化处理,得到数字PID控制律,即

PID控制系统的性能评价指标采用输出绝对误差积分(ITAE)表示,即:

为了防止控制对象出现超调现象,将系统超调量引入到控制对象的优化目标函数中,即式(3)变为:

式中,e(t)为系统误差,u(t)为控制器输出,tu为上升时间,ω1,ω2,ω3为权值。
3 蚁群优化神经网络
3.1 RBF神经网络
RBF神经网络是一种前馈式神经网络,包括输入、隐含层和输出三层结构,输入层将网络与外界连接在一起;隐含层将输入与隐含层间的信号进行非线性变换;输出层为作用于输入层的激活信号提供响应。典型的RBF神经网络结构如图2所示。
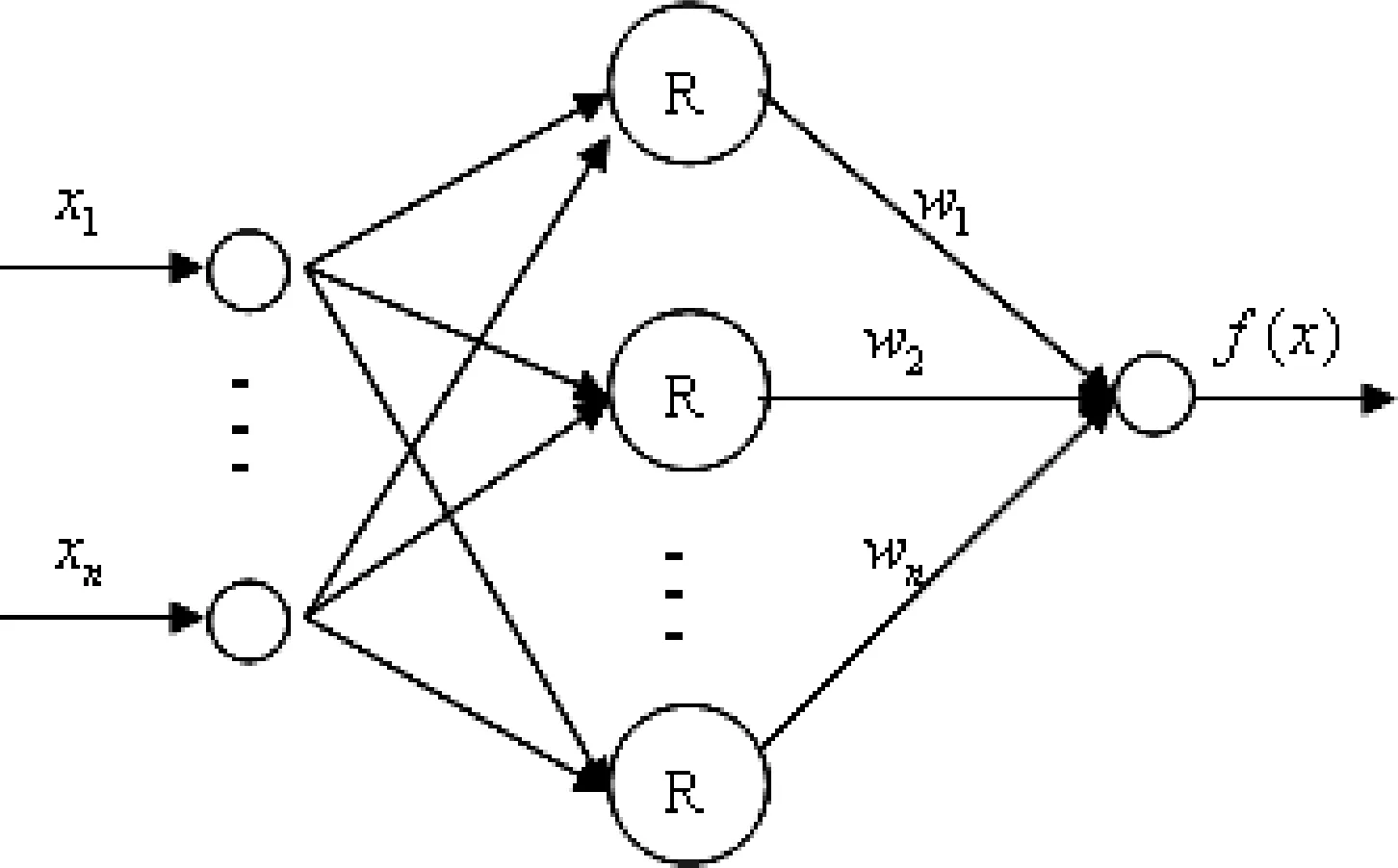
图2 RBF神经网络结构
设第i个样本点的输入向量为xi(i=1,2,…,n),第j个样本点的输出向量为yij(j=1,2,…,m)。第j个径向基函数的中心向量为Cj(j=1,2,…,nc),则RBF神经网络输出的计算公式为:

其中,wij为节点间的权值yij为第i个节点的输出;nc为隐层神经元个数;wi0为第i个节点的阈值;f为径向基函数。径向基函数定义如下:

其中,‖x-ci‖表示x和ci之间的距离。
综合上述可知,在RBF神经网络的应用中,输入层与隐含层的权值wij、隐含层函数的中心值ci和径向基核函数宽度σi的值与其性能密切相关,因此要获得性能较高的RBF神经网络,首先必须选择最合适的wij,ci,σi。
3.2 蚁群算法设计
(1)初始化蚁群位置和信息素
设蚁群规模为N,随机初始蚁群的位置,并根据RBF神经网络参数范围确定蚂蚁i的初始信息素大小:

根据式(7)可知,当f(xi)≥0时,且趋于无穷大时,信息素浓度将接近零,因此,在该种情况下需求修正蚂蚁的适应度f(xi)值,适应度f(xi)的具体修正方式为:

式中,f(xi)和f′(xi)分别为修正前后的适应度值,avg为f(xi)的平均值。
(2)路径选择规则
当每一只蚂蚁在完成一次搜索后,均要根据路径转移规则选择下一次搜索方向,本研究搜索方式为:
首先随机从蚁群选择k只蚂蚁,然后从选择的k只蚂蚁中抽取个体中信息素浓度最大者作为转移目标Xobj。式中,Xbest表示上次迭代中获得的最优解。

由于信息素浓度越大对其它蚂蚁的吸引程度就越大,从而使蚁群找到最优解的概率就越大,这样蚂蚁i就会按式(8)向目标蚂蚁位置聚集:

完成上述搜索后,就可以得到上次迭代最优解的蚂蚁Xbest,然后在该蚂蚁的邻域内进行进一步的精细搜索,即:(3)信息素更新策略

每完成一次局部搜索后,均需要更新蚂蚁i的信息素浓度τ(i),具体更新方式为:

式中,ρ表示信息素挥发系数。
3.3 BP神经网络参数优化步骤
(1)确定蚁群中蚂蚁个数m,并对其进行初始化,蚂蚁的位置向量代表参数wij,ci,σi,蚁群最大迭代次数和其它参数。
(2)训练样本输入到RBF神经网络进行学习和训练,当达到设定精度时,就得到网络训练输出值,并以训练误差平方和作为蚂蚁个体的适应度值,然后通过式(7)计算各只蚂蚁的信息素浓度。
(3)随机抽取p只蚂蚁,根据每只蚂蚁所在位置的信息素浓度大小,找出最优蚂蚁的位置设为Xbest,把它作为目标个体Xobj。
(4)种群中非最优蚂蚁按式(10)向目标蚂蚁位置移动进行全局搜索。
(5)最优蚂蚁根据式(11)在其邻域内进行精细的局部搜索。
(6)按式(12)更新每只蚂蚁的信息素浓度。
(7)将ACO得到的最优蚂蚁位置进行分解,得到RBF神经网络的最优参数wij,ci,σi。
(8)根据最优参数wij,ci,σi建立PID控制器参数优化模型。
4 ACO-RBFNN的PID控制器
ACO-RBFNN控制系统利用RBF神经网络非线性、自学习能力和PID结构控制、容易实现等优点来克服常规PID控制器的不足。利用ACORBFNN对控制器的控制参数进行自适应调整,构成一个自适应PID控制系统,其结构如图3所示。

图3 ACO-RBFNN的PID控制器结构
5 仿真实验结果与分析
5.1 仿真对象
为了检验ACO-RBFNN对PID控制器参数的优化效果,在Matlab 2007平台下采用Simulink进行仿真。在热工控制系统中,单回路控制系统主要用于控制燃烧系统和辅机系统,本研究选取广义控制作为ACO-RBFNN寻优对角,采用PID控制器,控制对象为:

输入指令为一阶跃信号,采样时间为1ms,采样(ITAE)作为PID控制器参数优化的最小目标函数。
5.2 结果与分析
根据自动控制理论知识,寻找控制对象参数的稳定区域主要有两种方法:一种是根轨迹法,另一种是奈奎斯特曲线法,如果含有纯迟延环节,就选择奈奎斯特曲线法寻找控制对象参数,否则采用根轨迹法寻找控制对象参数。对于式(13)的控制对象,因其τ=-25,因此该对象中含有纯迟延环节,因此采用奈奎斯特法选取控制对象参数稳定的区域。
首先采用奈奎斯特法确定kp的范围是[0,20],Ti的取值范围是[0,2],Td的取值范围是[10,30]取ω1=0.999,ω2=0.001,ω3=2.0。采用RBF神经网络结构选取3-6-l,隐层节点最大节点数设为20,蚁群算法的种群大小10,ρ=2,迭代次数为200。
为使本研究提出的PID参数优化结果具有可比性,采用Z-N法、单纯法作为对比模型,性能评价指标为上升时间(s)、超调量(%)、衰减率(%)、调节时间(s)。各方法获得的优化PID控制器参数如表1所示。

表1 各种方法的PID控制器参数优化结果
对表1对比结果进行分析可知,ZN法对PID参数优化结果不理想,超调量偏大,若将这个结果运用于工业自动化控制系统,导致控制稳定性差;由于受到初始值的影响,单纯型法选取初始值不同,相应的参数优化结果不同,导致寻优结果有不确定性,不能应用于实际的工业自动化控制现场。相比而言,ACO-RBFNN得到了较好的PID控制器优化效果,超调量小,调节时间较,对比结果说明,ACO-RBFNN是一种有效的工业自动化控制器参数优化方法。
各种算法的PID控制器仿真曲线如图4所示。从图4仿真结果可知,Z-N法的超调量十分大,抗干扰能力弱;单纯形法初值不当易导致控制失败;而ACO-RBFNN优化后的PID控制器取得了理想的控制效果,很好的克服了传统PID控制器参数优化方法的缺陷,可以很好的满足工业自动化控制系统的性能指标要求。

图4 各种寻优方法的比较
6 结束语
在工业自动化控制系统中,PID控制器参数设置十分关键,其直接关系系统的正常运行。传统的参数优化方法难以满足系统的控制性能要求,利用RBF神经网络的智能性和ACO的全局搜索能力,提出一种基于ACO-RBFNN的工业自动化PID控制器参数优化方法。仿真结果表明,ACORBFNN能够使PDI控制器参数进行在线优化,改善了常规PID控制器的性能,达到了预期目的,在工业自动化控制系统中有着广泛的应用前景。
[1]孙增圻.智能控制理论与技术[M].北京:清华大学出版社,1997.
[2]王伟,张晶涛,柴天佑.PID参数先进整定方法综述[J].自动化学报,2000,26(3):347-355.
[3]何福忠,孙优贤.基于稳定参数空间的PID调节器遗传优化设计[J].控制与决策,2000,15(4):507-509.
[4]郭庆鼎,李蒙,郭威.PID控制器参数的遗传算法优化设计[J].沈阳工业大学学报,2000,22(1):31-33.
[5]吴宏鑫,沈少萍.PID控制的应用与理论依据[J].控制工程,2003,10(1):37-42.
[6]龙晓林,苏义鑫.基于PID神经网络的控制器研究[J].武汉理工大学学报(信息与管理工程版),2002,24(5):32-35.
[7]Bo Xu,Qing Guan,Ke Chen.Multi-Agent Coalition Formation Based on Quantum-behaved Particle Swarm Optimization[J].Journal of Information&Computational Science,2010,7(5):1059-1064.
[8]王洪斌,杨香兰,王洪瑞,等.一种改进的RBF神经网络学习算法[J].系统工程与电子技术,2002,24(6):103-105.
[9]段海滨.蚁群算法原理及其应用[M].北京:科学出版社,2005.
[10]孙香花,许波.基于多宇宙并行遗传算法PID参数整定[J].辽宁工程技术大学学报(自然科学版),2010,29(5):891-894.
Parameters Optim ization of Industrial PID Controller Based on Neural Network and Ant Colony
SUN Qiong-qiong,GUO Jing-bo
(Pingdingshan Institute of Education,Pingdingshan 467000,China)
Because the traditionalmethod can not obtain the optimal parameters of PID controller,this paper puts forward a PID controller optimization algorithm based on RBF neural network and ant colony optimization algorithm(ACO-RBFNN).PID controller parameters are taken as RBF neural network input and the output of the system is taken as desired output,and parameters of RBF neural network are optimized by ant colony optimization algorithm to optimize parameters of PID controller,thus realizing on-line optimization of the PID controller parameters.The simulation results show that the proposedmethod can get satisfactory control effect and be applied to PID controller parameter optimization in industrial automation control system.
PID Controller;Parameters optimization;RBF neural network;Ant colony optimization algorithm
10.3969/j.issn.1002-2279.2014.05.009
TP393
:A
:1002-2279(2014)05-0027-04
河南省科技计划重点项目(102102210416)
孙琼琼(1980-),女,河南郏县人,讲师,硕士,主研方向:从事计算机网络技术方面的研究。
2013-12-16
