基于电阻反馈的SMA控制系统设计❋
2014-08-07耿令波吴洪涛
张 健,陈 柏,耿令波,陈 笋,吴洪涛
(1.南京航空航天大学机电学院,南京210016;2.上海交通大学附属新华医院,上海200092;3.沈阳自动化研究所,沈阳110016)
基于电阻反馈的SMA控制系统设计❋
张 健1,陈 柏1,耿令波3,陈 笋2,吴洪涛1
(1.南京航空航天大学机电学院,南京210016;2.上海交通大学附属新华医院,上海200092;3.沈阳自动化研究所,沈阳110016)
形状记忆合金(SMA)驱动器在生物医疗中得到了广泛应用。目前,SMA驱动器的控制器多采用外部传感反馈方式,体积大,应用受到限制。提出一种基于SMA内部电阻反馈的嵌入式控制电路。使用ATMEGA16单片机搭建了SMA驱动器加热控制电路及恒流源电桥方法的电阻测量采集电路。实验表明:该控制系统可以产生可控PWM,恒流源电桥方法测SMA电阻可以得到足够的测量精度,系统可用于SMA驱动器的控制。
SMA驱动器;ATMEGA16单片机;电阻反馈;控制电路
1 引 言
形状记忆合金(shape memory alloy,SMA)是一种新型功能材料。Ni-Ti记忆合金驱动器具有其他记忆材料无可比拟的优点:抗腐蚀性能强,生物相容性好,力学性能优良,抗疲劳、热加工作性能好[1-2],因此,成为目前生物医用材料中的首选。同样,在微型介入导管机器人的设计中,SMA驱动器也得到了广泛应用[3-4]。
设计了一种SMA弹簧驱动器控制的介入导管机器人,如图1所示。导管由位于中心的骨架弹簧以及均匀布置在导管横截面方向上的三个SMA驱动器组成。介入导管机器人弯曲单元的运动可以通过控制其单元的驱动器来实现在任意方向上的弯曲与转向。依据手术对象及环境的个体差异,可以通过多个弯曲单元的重构增加其自由度,实现较大的弯曲角度。
2 反馈变量选择
选择合理的反馈变量是SMA驱动器控制的关键所在。在SMA加热动作过程中存在四个反映其动作特性的参数,分别是SMA驱动器的输出力、输出位移、SMA的温度和电阻。其中,输出力和输出位移为SMA的外部变量;温度和电阻为SMA的内部变量。

图1 SMA驱动器布置图
目前,SMA驱动器通常采用传感器测量反馈的方式进行控制[5],但因结构中需要设计传感器的安装,不利于系统的微型化,应用受到限制。SMA具有自传感特性,在发生应变时,内部电阻率发生改变。所以考虑到所设计微型导管机器人的应用环境,在SMA驱动器中采用内部电阻反馈的方式对其控制系统进行设计,以避免使用外部传感器。
3 硬件电路设计
根据所设计的介入导管机器人SMA驱动器的结构与功能分析,为实现对SMA驱动器有效控制,控制系统应满足:①控制电路输出占空比可调的脉冲,可以控制SMA弹簧加热电流的通断;②在加热间歇期可以对SMA弹簧的电阻进行检测;③输出脉冲的占空比要有限制,防止SMA在加热过程中记忆效应恶化。此外,在电路设计过程中,还需要考虑到与上位机的通讯、加热电路与测量电路的隔离、小电阻如何准确测量等问题。控制系统的结构如图2所示。
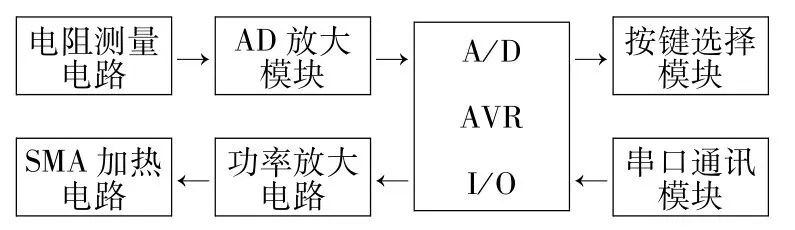
图2 控制系统结构图
3.1 加热控制电路
直接通电加热方法由于结构简单且便于控制而得到广泛应用。由于SMA驱动器是一个热惯性元件,可以通过脉冲调宽(PWM)的方法实现加热功率的调节。单片机控制器输出不同占空比的PWM方波,经过光耦元件及功率放大电路,实现对SMA驱动器的驱动。采集的电阻反馈信号经过AD放大器,送到单片机的A/D转化器转换为数字信号,单片机根据电阻变化调节输出PWM方波占空比的大小。
图3为单个SMA驱动器通过PWM加热电路。Atmega16单片机[6]的T/C模块,可以产生频率及占空比可调的PWM。当PWM信号为高电平时,场效应管导通,SMA驱动器处于加热状态;当PWM信号为低电平时,场效应管截止,SMA驱动器处于冷却状态。通过控制PWM占空比的大小可以调节SMA驱动器两端电流的通断时间,从而控制施加在SMA驱动器上的热量,达到准确的功率控制,实现控制介入导管的弯曲动作。
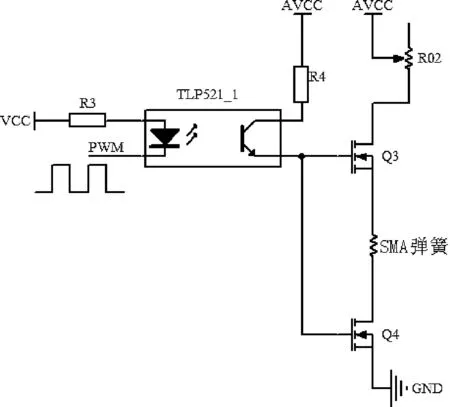
图3 单个SMA驱动器加热电路
3.2 电阻测量电路
在SMA驱动器的加热过程中,其电阻值随温度的升高而发生变化,考虑到SMA弹簧的电阻很小,如果采用欧姆方法将很难测得电阻变化的精确值。因此采用恒流源电桥法测量SMA电阻的变化。电路原理图如图4所示。用一个30mA的恒流源通过电桥,可以产生mV级的电压,电压满足关系式1,即当电阻发生变化ΔR=0.2Ω时,会产生约为1.5mV的电压差值。

单片机通过 I/O口选通多路模拟开关MAX4051,当SMA驱动器处于电阻采集状态时,单片机会通过编码选通其某一通道,电桥两端的电压信号分别经过两片MAX4051,再经放大器的作用,之后传送至单片机的ADC模块。当SMA驱动器处于加热状态时,单片机关断模拟开关,处于断开状态,防止加热电流过大,对模拟开关造成冲击进而保护单片机芯片。当单片机AD基准电压为2V,AD620增益500倍下,电阻测量电路的分辨率可达0.0002Ω。
4 仿真与实验
使用EDA工具软件Proteus对所设计的电路进行了电路分析与仿真。图5为基于Atmega16单片机SMA驱动器加热电路的Proteus仿真原理图。
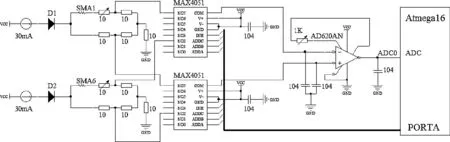
图4 电阻测量电路
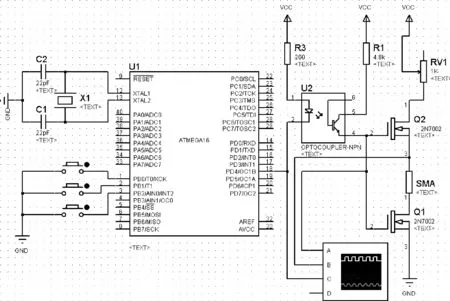
图5 仿真原理图
根据电路仿真原理图编写程序,仿真过程中,示波器输出频率20KHz、占空比为60%的PWM波形,如图7所示。使用作者制作的控制板,如图6所示,进行实验验证,示波器产生的PWM波形,如图8所示。
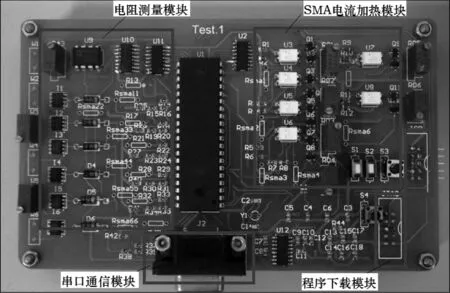
图6 控制电路实验板
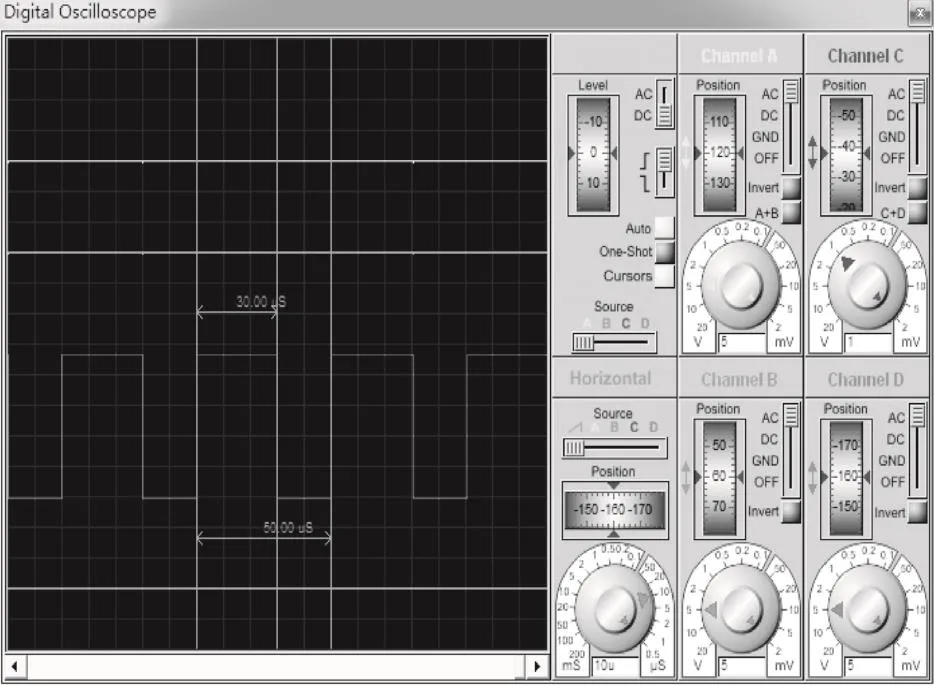
图7 占空比60%PWM仿真波形图
5 结束语
设计了一种基于SMA驱动器内部电阻反馈的控制系统。采用ATMEGA16单片机输出PWM进行驱动控制,以恒流源电阻桥的方式测量SMA驱动器的电阻, 可以得到0.0002Ω的电阻分辨率。最后,通过仿真分析,使用制作的控制电路板,验证了控制系统的正确性,可以用于SMA驱动器的控制。
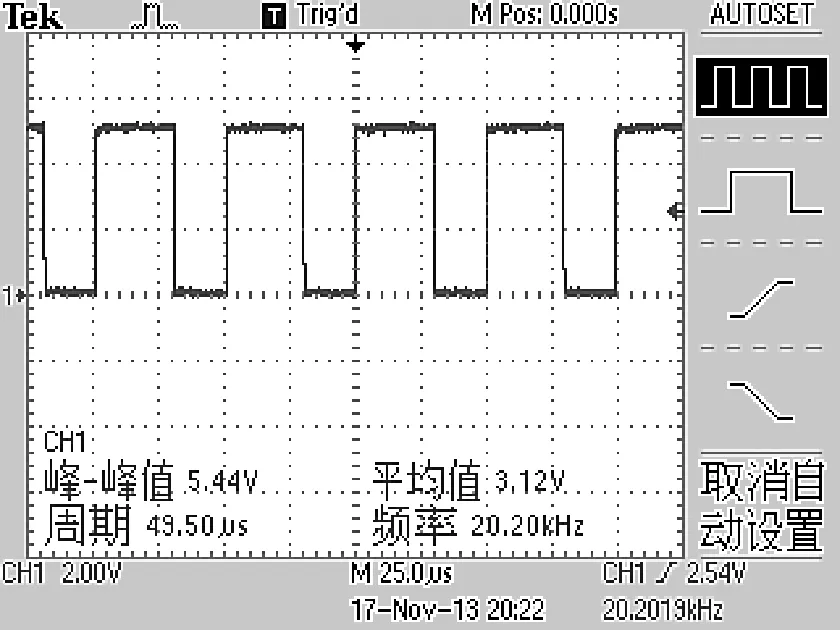
图8 占空比60%PWM实验波形图
[1]Ho M,Desai J P.Characterization of SMA actuator for applications in robotic neurosurgery[C].IEEE International Conference in Medicine and Biology Society,2009:6856-6859.
[2]赵连城,蔡伟,郑玉峰.合金的形状记忆效应与超弹性[M].北京:国防工业出版社,2002.
[3]Dupont PE,Lock J,Itkowitz B,et al.Design and control of concentric-tube robots[J].IEEE Transactions on Robotics,2010,26(2):209-225.
[4]付宜利,高安柱,刘浩,等.导管机器人系统的主从介入[J].机器人,2011,33(5):579-591.
[5]李爱华,杨凯,辜承林.基于内嵌式SMA驱动器的机械手控制[J].电机与控制学报,2006,10(3):238-241.
[6]李晓锋.AVR单片机原理与应用[M].北京:北京理工大学出版社,2010.
Design of Control System for SMA Actuator Based on Resistance Feedback
ZHANG Jian1,CHEN Bai1,GENG Ling-bo3,CHEN Sun2,WU Hong-tao1
(1.School of Mechanical and Electrical Engineering,Nanjing University of Aeronautics and Astronautics,Nanjing 210016,China;2.Xinhua Hospital,Medical School of Shanghai Jiaotong University,Shanghai200092,China;3.Shenyang Institute of Automation,Shenyang 110016,China)
SMA actuator has been widely applied in the biomedical treatment.Exterior sensor is often used for control system of SMA actuator.An embedded control circuit based on SMA resistance feedback is introduced in this paper.The drive heating control circuit and resistancemeasurement circuit are developed based on ATMEGA16.The experimental result shows that the constant current bridge can be applied to get enough precision in SMA resistance measuring and the system can be used for SMA actuator control.
SMA actuator;ATMEGA16;Resistance feedback;Control circuit
10.3969/j.issn.1002-2279.2014.04.028
TH122;TP273
:B
:1002-2279(2014)04-0091-03
江苏省自然科学基金资助项目(BK2012798);江苏省产学研联合创新资金--前瞻性联合研究项目(BY2012011);国家自然科学基金资助项目(No.51075209);南京市科委产学研计划(201204014);上海市科委科技计划项(124119a3900);上海交大医工交叉项目(YG2011MS08);国家863科技计划项目(2013AA041004)
张健(1988-),男,山东省泰安市宁阳县人,硕士研究生,主研方向:医疗机器人技术,机电控制技术。
2013-12-13