海上无人驻守井口平台控制方案研究
2014-08-07李丽年
李丽年
(中海油能源发展股份有限公司油田建设工程设计研发中心 天津300452)
海上无人驻守井口平台控制方案研究
李丽年
(中海油能源发展股份有限公司油田建设工程设计研发中心 天津300452)
海上无人驻守井口平台是海上固定平台群的重要组成部分,无人驻守井口平台上生产设施较少,工艺流程相对简单。针对此特点,在确保操作人员与设备安全的基础上,提出了高集成化、简化设计、降低成本的控制方案,并进行研究分析,为今后无人平台设计和推广应用起到借鉴作用。
无人平台 控制系统 PLC
海上无人驻守井口平台(以下简称“无人平台”)是海上固定平台群的重要组成部分,一般采用3个“1”的模式进行开发,即1座平台、1根海管、1根电缆。生产出的物流经节流后直接进入海底管线,输送至相邻井口或中心平台进行处理。常规无人平台设有多路阀、多相流量计、清管球发射器等,电力系统一般由相邻平台供给。
根据无人平台的特点,平台中央控制系统能动态显示生产流程、多路阀和多相流量计的主要工艺参数,并以声光报警形式显示平台生产和安全的异常状态,同时在相邻的依托平台远程监控无人平台的生产状况。因此无人驻守平台的安全性、可靠性要求更高,控制系统的安全级别至少为 SIL 2级。系统的控制逻辑由安全监控系统实现,可及时、准确地探测到可能发生或已经发生的火情或可燃气体泄漏,并采取相应的安全措施(如报警、关断、消防等),以保护平台人员和设备的安全。以上控制方案已在渤中 29-4,WHPB平台和渤中26-3,WHPB平台得到了应用。
1 中央控制系统
1.1 配置
常规无人平台设置 2套 PLC控制系统,用于实现过程控制系统(PCS)、紧急关断系统(ESD)和火气探测系统(F&G)的功能。中控室至少设置 1台操作站兼做工程师站,操作站作为控制系统的人机接口,用于系统组态、调试及参数调整。打印机可用于生产报表及事件记录打印。无人平台对于仪表的配置要求更高,控制系统选用安全仪表系统(SIS)实现。依托平台可实现对无人平台控制系统的远程监控。
在可靠性设计上,控制系统的 CPU模块、电源模块、通讯模块、数据通信总线和 I/O模块等采用1∶1冗余配置。控制系统的安全级别(SIL)要求至少为SIL 2级。
1.2 PLC的基本功能及原理
1.2.1 PLC的基本功能
①显示井口采油树、电潜泵、多路阀、多相流量计、海管关断阀等主要设备的运行状态及各设备的压力、温度、液位和流量等;②监控生产流程,并具有自诊断功能,监视和诊断控制系统、现场仪表的工作状态;③对异常情况进行报警,自动/手动实现相应级别的关断操作,可实现 4个级别的关断;④显示无人平台火气探测系统状态,火灾和可燃气体泄漏时声光报警,自动/手动执行火气状态控制;⑤实现中控与电潜泵控制盘以及相关平台的通讯传送。
1.2.2 PLC的构成及原理
PLC可编程控制器具有功能强大、体积小、灵活可靠等优点,PLC框架结构图如图1所示。
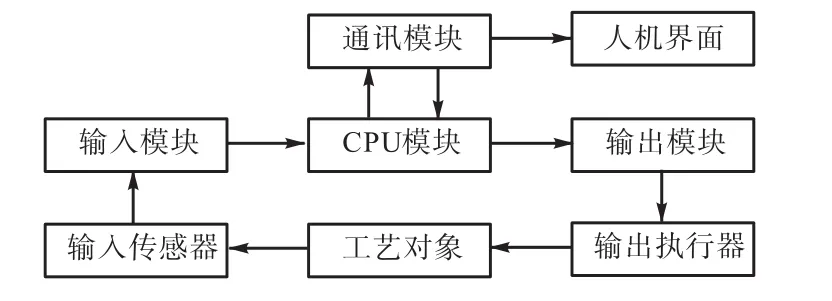
图1 PLC的框架结构图Fig.1 Frame structure of PLC
现以PLC SLC 5/04可编程控制器为例,介绍其硬件和软件配置:①硬件配置。CPU模块(1746-L541)是该控制系统的核心,按照事先装载的程序,对输入模块提供的各种信号进行逻辑判断和算术运算,并可根据依托平台的控制命令,控制输出模块。输入模块,从现场传感器获取信号,经过处理变成可编程控制器内部信号,供可编程控制器进行运算、比较、传输等。输出模块,从现场传感器获取信号,经过处理后直接由相应的可编程控制器输出信号给现场设备,从而实现工艺关断或调节。②软件组态。SLC 5/04可编程控制器可利用 Rslogix 500进行在线/离线编程,Rslogix 500具有方便易用的操作界面,可在Windows下运行,同时还具有高级诊断能力和可靠的通讯能力,可通过Rslinx或Wintelligent linx直接从可编程控制器获取数据,并可监测处理过程,实现在线编程,方便系统的操作和维护。
综上所述,大规模应用的 PLC已全面使用计算机系统。和 DCS一样,控制器与 IO站使用现场总线,上位机平台使用以太网结构。小型 PLC将向更专业化的实用角度发展,大型PLC与DCS的界线将逐步淡化,直至完全融和。针对无人平台的特点,中央控制系统采用 PLC控制可以满足中央控制要求,且比 DCS控制器更具有经济性,是无人平台中央控制系统的首选。
1.3 SIL等级
安全完整性水平(SIL,Safety IntegrityLevel),是一种离散的水平,用于规定分配给安全系统的安全功能的完整性要求。安全完整性水平越高,安全功能的失败可能性就越低。IEC 61508中规定系统有4种安全完整性水平,如表1所示,SIL 4最高,SIL 1最低。
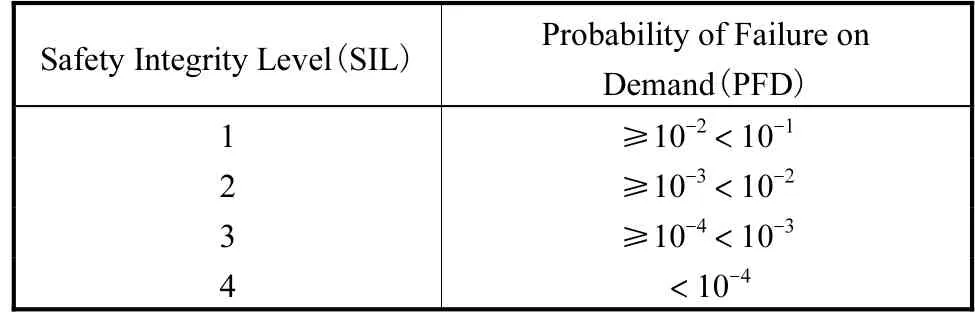
表1 SIL等级划分表Tab.1 SIL hierarchy table
基于无人平台的特点,平台夜间无人值守,虽然平台工艺流程简单,生产设备较少,但一旦中控失灵,后果无法估计。因此需要提高控制系统的安全级别,根据标准IEC 61508和IEC 61511的要求,控制系统的安全级别至少为SIL 2级。
2 逻辑联锁
中央控制系统一般是无人操作、独立的自动控制系统,该系统能独立完成无人平台的就地控制功能,并能将平台的生产、安全信息传送至依托平台以实现远程监控,同时可接收并执行依托平台的控制指令。
根据无人平台的特点,应急关断系统分为4级。
2.1 ESD 1级关断为弃平台关断
该关断级别最高,此关断只能由平台主要负责人或指定专人手动启动。操作人员在平时检修或值班期间经允许可触发弃平台按钮,并在中控室以及依托平台中控室设置有ESD 1级按钮,ESD 1级动作时设备除应急支持系统延时关断外全部关停。ESD 1级关断将引起 ESD 2级关断发生。ESD 1级逻辑如图 2所示。
按常规海上平台逻辑,ESD 1动作时要停主电,由于无人平台无仪表气,主电源无需给空压机供电,因此 ESD 2动作时就停主电。在依托平台中控室设置无人平台的平台状态灯,用于监控和遥控关断,提高平台的安全可靠性能。
2.2 ESD 2级关断为火气关断
该级关断可由平台火灾或可燃气体严重泄漏引起,来自火气系统,并在按钮盘上设置有确认火和确认气的按钮,该级别与井口区确认火/确认气、生产区的确认火/确认气、电控房间和中控房间的确认火/确认气相关,它可由操作人员观察到火情后手动启动,也可由火气控制逻辑自动启动。除执行本级关断的功能外,ESD 2级关断将引起ESD 3、4级关断发生。典型的ESD 2级逻辑如图3所示。

图2 典型的ESD 1级逻辑图Fig.2 Typical ESD-1 logic diagram
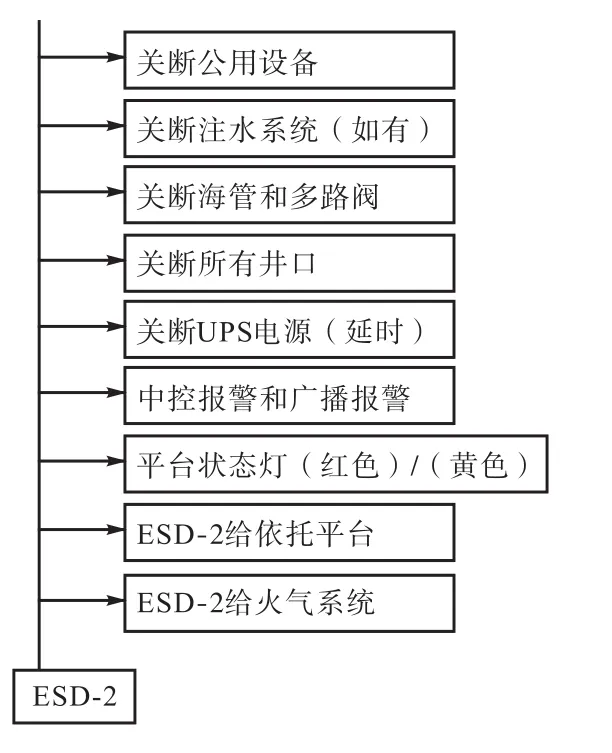
图3 典型的ESD 2级逻辑图Fig.3 Typical ESD-2 logic diagram
为了避免无人平台的误报警和增强安全可靠性,ESD 2级手动时,停平台主电,应急电和UPS电制不停;自动逻辑时,只有当电控房间和中控房间产生ESD 2时脱相应电制,其他区域ESD 2不停主电。
2.3 ESD 3级关断为生产/公用关断
该级关断由主电源断电、依托平台的生产及以上关断、井口盘油箱液位过低、井口盘液压泵出口压力过低、闭排罐液位过高、ESD手动站气压过低以及海管压力过高或过低引起的,可手动和自动启动。除执行本级关断的功能外,ESD 3级关断将引起ESD 4级关断。ESD 3级逻辑如图4所示。
注水系统一般来自依托平台,在生产流程发生故障时,注水系统并不会受影响,因此ESD 3时不停止注水系统。另外,对于加热器和搅拌器等作为生产设备的服务设备,为了防止停产时设备出现干烧和冷凝现象,ESD 3时不停止加热器和搅拌器。
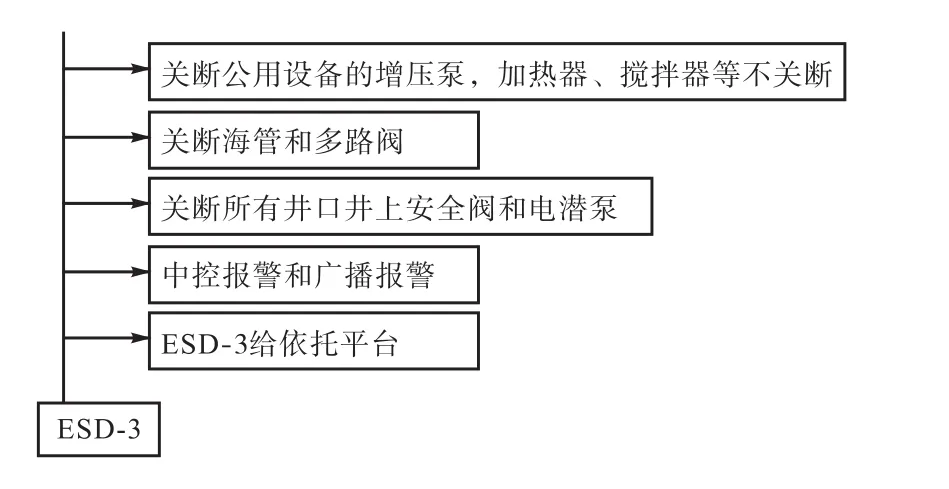
图4 典型的ESD 3级逻辑图Fig.4 Typical ESD-3 logic diagram
2.4 ESD 4级关断为单元关断
由单个设备或单井故障引起的关断,具体是由单井出口管线的压力高/低、开排/闭排罐液位低、注水海管压力高/低、化学药剂罐液位低等引起的,此关断仅关断故障设备或单井,而不影响其他设备的正常操作。ESD 4级关断可手动/自动启动。
3 工艺流程控制
无人平台的工艺流程仪表控制较为简单,一般不设置仪表风系统,且无需设置调节回路。在井口管线、海管上设置现场仪表,通过工艺设定点来控制设备及管线出入口的关断阀和多路阀,关断阀采用液压驱动,液压源来自井口盘。
无人平台常规设置多路阀、多相流量计、清管球发射器等,生产物流在无人平台上不处理,直接靠电潜泵的压力通过海底管道输送至依托平台进行处理。需计量的单井物流经多路阀导入计量流程,进入多相流量计进行油、气、水三相计量,计量后的物流再与生产物流汇合。
在设计井口控制盘时需考虑相应预留井模块的安装空间,井口控制盘通常采用电驱动液压泵方式,易熔塞和 ESD手动站的气源通常由 N2瓶供给,井口管线压力开关由常规的气动仪表改为电动仪表,以提高安全可靠性能。井口控制盘实现对井下安全阀和井上安全阀等装置进行监控,并将井口状态传给中控 PLC,同时接收中控发来的应急关断信号,此控制方案满足工艺要求。
4 结 语
提出了无人驻守井口平台的基本特点和仪控的基本方案,仪控系统一般是无人操作、独立的自动控制系统,系统采用先进的PLC进行独立集成,控制系统的安全级别至少满足SIL 2等级,能独立完成无人平台的就地控制功能,并能将平台的生产、安全信息传送至依托平台的中央控制系统以实现远程监测,同时可接收并执行中央控制系统的控制指令以完成远程控制。整个控制系统简易高效、功能完善、安全可靠。无人平台一般无仪表风系统,多为电动或液动仪表或用N2气驱动。气动仪表气源采用N2气瓶或天然气,仪表尽量采用就地仪表,以减少控制仪表数量,整个流程不设置调节回路,无人平台通常设有多路阀、多相流量计的单井计量系统以实现远程控制自动倒井。
无人驻守平台的 PLC简易控制已经在诸多平台中得到了广泛应用,现提出无人平台最基本的中控系统、逻辑联锁和流程控制方案,以便更好地进行无人平台设计,支持边际油田开发。
[1]胡寿松.自动控制原理[M].4版.北京:科学出版社.2001.
[2]钱晓龙.循序渐进 SLC500控制系统与Panel View 训练课[M].北京:机械工业出版社,2008.
[3]何衍庆.集散控制系统原理及应用[M].北京:化学工业出版社,2009.
[4]IEC61508标准[S].国际电工委员会,2010.
[5]IEC61511标准[S].国际电工委员会,2003.
Study of Control Scheme for Unmanned Offshore Wellhead Platforms
LI Linian
(CNOOC Energy Technology & Services-Oilfield Construction Engineering Co.R&D Center,Tianjin 300452,China)
As an important part of fixed offshore platforms,an unmanned wellhead platform features less production equipments and simpler technological processes.Based on such characteristics and the safety of both the operator and equipment,the paper presented a control scheme with high integration,simplified design and cost reduction.Then,the scheme was analyzed,aiming to offer reference to the design,application and popularization of unmanned platforms.
unmanned platform;control system;PLC
TE931
A
1006-8945(2014)12-0003-03
2014-11-12
