自升式平台桩靴滑移实时监测技术研究
——以罗布雷300型平台为例
2014-08-07赵景芳
赵景芳
(中海油田服务股份有限公司)
自升式平台桩靴滑移实时监测技术研究
——以罗布雷300型平台为例
赵景芳
(中海油田服务股份有限公司)
以发生损伤的罗布雷300型平台为例,建立了自升式平台的整体有限元模型和桩腿-导向板接触区的局部模型,分析了桩靴滑移产生的桩腿结构各处的位移、倾斜角度及船体上下导向板处的载荷、升降装置载荷和桩腿半圆板的应力接近或达到材料弹性极限时导向板各结构的应力应变状态,提出了监测平台桩靴滑移的位移测量和应变测量技术。结果表明,桩靴滑移时下导板以下桩腿发生明显倾斜,升降装置载荷超过额定载荷,在导向板肋板处有应变变化较为缓慢的区域,可以通过应变反算桩腿-导向板接触载荷。
自升式平台;桩靴滑移;桩腿;导向板;位移测量;应变测量;罗布雷300型平台
对于一些老的海上油田,频繁的作业使自升式平台的“踩脚印”问题日益突出,严重影响作业时效及平台桩腿结构安全[1-2]。国外BP、ENI、Ensco、Keppel等十几家公司曾联合进行专项技术研究,共同应对旧脚印困扰;国内渤海油田发生过多次因踩脚印而导致的险情,罗布雷300型平台在进坞检修时发现部分桩腿半圆板发生变形,最大凹陷变形43 mm,最大凸出变形22 mm,沿桩腿变形长度达25 m。通过调查分析该平台以前的作业井位数据,认为桩腿损伤的原因是平台在渤海某井插桩时遇到旧脚印而多次发生桩靴滑移,插桩时间长达7 d,导致平台半圆板受力过大而产生变形。本文以发生损伤的罗布雷300平台为例,建立了平台的整体模型和桩腿与导向板接触区的局部模型,分析了桩靴滑移产生的桩腿结构处的位移、倾斜角及平台上下导板处的载荷,以及桩腿半圆板的应力接近或达到材料弹性极限时导向板各结构的应力应变状态,提出了监测平台桩靴滑移的位移测量技术和应变测量技术,以帮助平台安全、高效地完成插桩就位作业。
1 桩靴滑移监测技术方案
发生损伤的罗布雷300型平台的主平台为三角形,在站立状态下由3条三角形桁架式桩腿支撑,每条桩腿的底部设有桩靴提供支撑,每条桩腿通过升降齿轮与主平台连接。升级改造后,该平台总共有54套升降装置,每条桩腿的弦杆上配有3套升降装置;平台上设有上下2组导向板,导向板为120°圆弧形厚板,并通过3条肋板支撑在平台上,每条桩腿周围的6个导向板可保持桩腿上下移动过程中的正直度。假设平台首部、右舷、左舷桩腿分别为1#、2#、3#桩腿,每条桩腿的3根弦管分别为A、B、C,则3#桩腿的A弦管简称为3 A。罗布雷300型平台桩腿和导向板相对位置如图1所示。
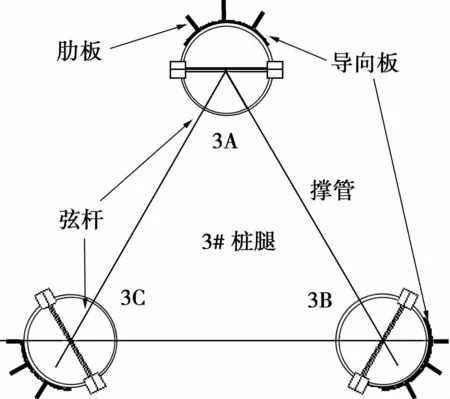
图1 罗布雷300型平台桩腿-导向板结构示意图
为全面分析半圆板损伤原因,形成桩靴滑移检测方法,按照图2所示流程,开展以下几方面的研究:
1)建立平台整体模型,设定不同的桩靴滑移方向及距离,计算平台各部分结构的位移及上下导向板处的载荷;
2)建立上下导向板处桩腿和导向板接触的局部模型,局部模型的边界条件来自于整体模型;
3)以半圆板最大应力达到其材料的弹性强度为评定指标,确定各桩靴在沿不同方向滑移时许可的滑移距离、桩腿结构变形量、导板与桩腿接触压力、导板及其肋板的应变值,以此为依据优化检测方法。
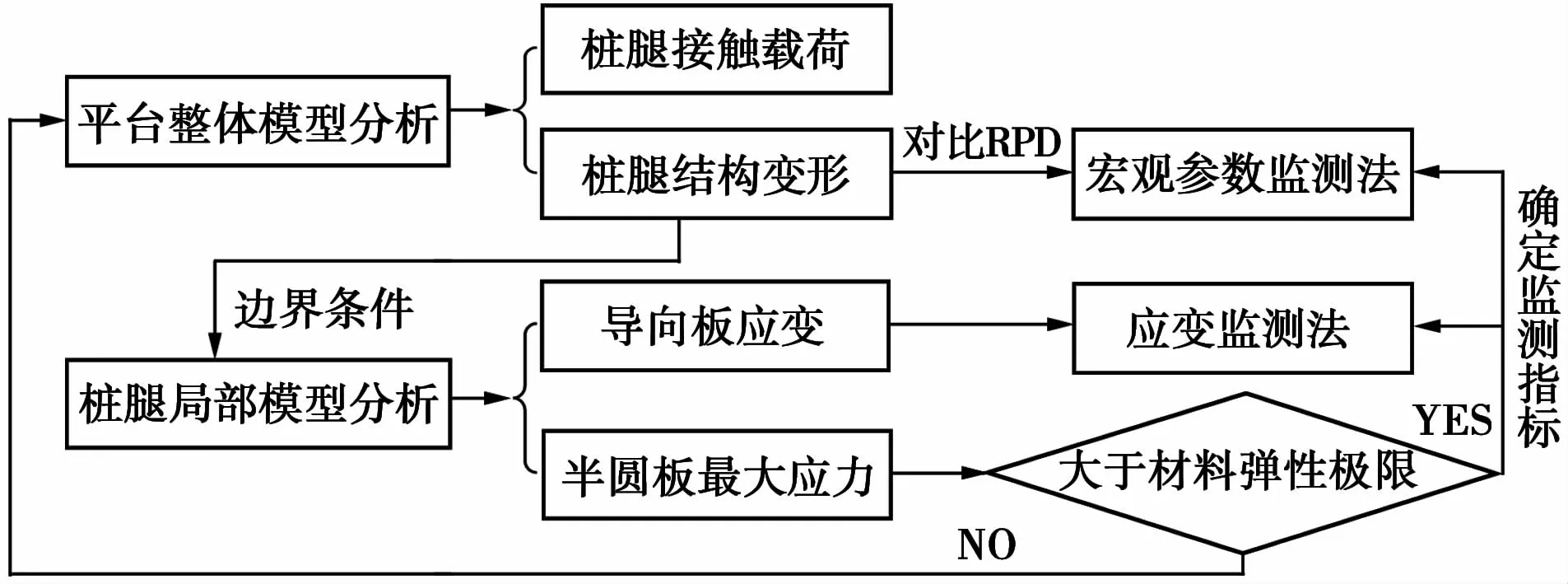
图2 自升式平台桩腿滑移分析流程图
2 平台整体模型和桩腿与导向板接触区局部模型的建立
2.1 平台整体模型
建立罗布雷300型平台整体有限元模型[3],整体坐标原点为船体重心位置,x轴方向为船体首向,同时考虑该模型的以下特点:
1)桩腿和导向板的约束,在水平方向为耦合约束,同时可释放垂直方向的自由度。
2)根据插桩及“试踩”特点,一般1#桩腿最安全,而平台及2#、3#桩腿对称,因此假设3#桩发生滑移,1#、2#桩插桩到一定深度且未发生滑移。
3)桩靴约束按弹性约进行计算。计算时滑移桩靴的转动刚度按照SNAME规范取许可值的1/4,另外2个桩靴取许可值的1/2,约束刚度系数按照文献[4]方法选取。
4)作业水深为25~88 m,气隙为0~20 m。计算中发现,因为粘土层桩靴约束刚度系数较小,气隙越大桩腿倾斜对弦杆的影响越小,因此后期计算中气隙按0计算;但对于砂土和不排水抗剪切模量较大的粘土,因为桩靴底部约束较强,气隙增大时桩腿倾斜对弦杆的影响增大,需要按实际作业气隙建模。
5)滑移距离按0~3.5 m试算,滑移方向取与船首0~180°方向,每隔15°计算一次;桩腿应力超过材料弹性极限后停止该工况的试算。
6)考虑桩靴滑移后发生下沉(滑入桩坑)的情况,下沉量分别按0.5 m和1.5 m对比计算。结果表明桩靴下沉量对导板压力影响不大。
7)考虑空船质量及漂浮可变载荷。
8)不考虑环境载荷的影响。
图3为罗布雷300型平台整体有限元模型,分析时取水深及入泥深度之和为50 m,气隙为0 m,土体为粘土,不排水抗剪切强度为30 k Pa,滑移距离为2.2 m。
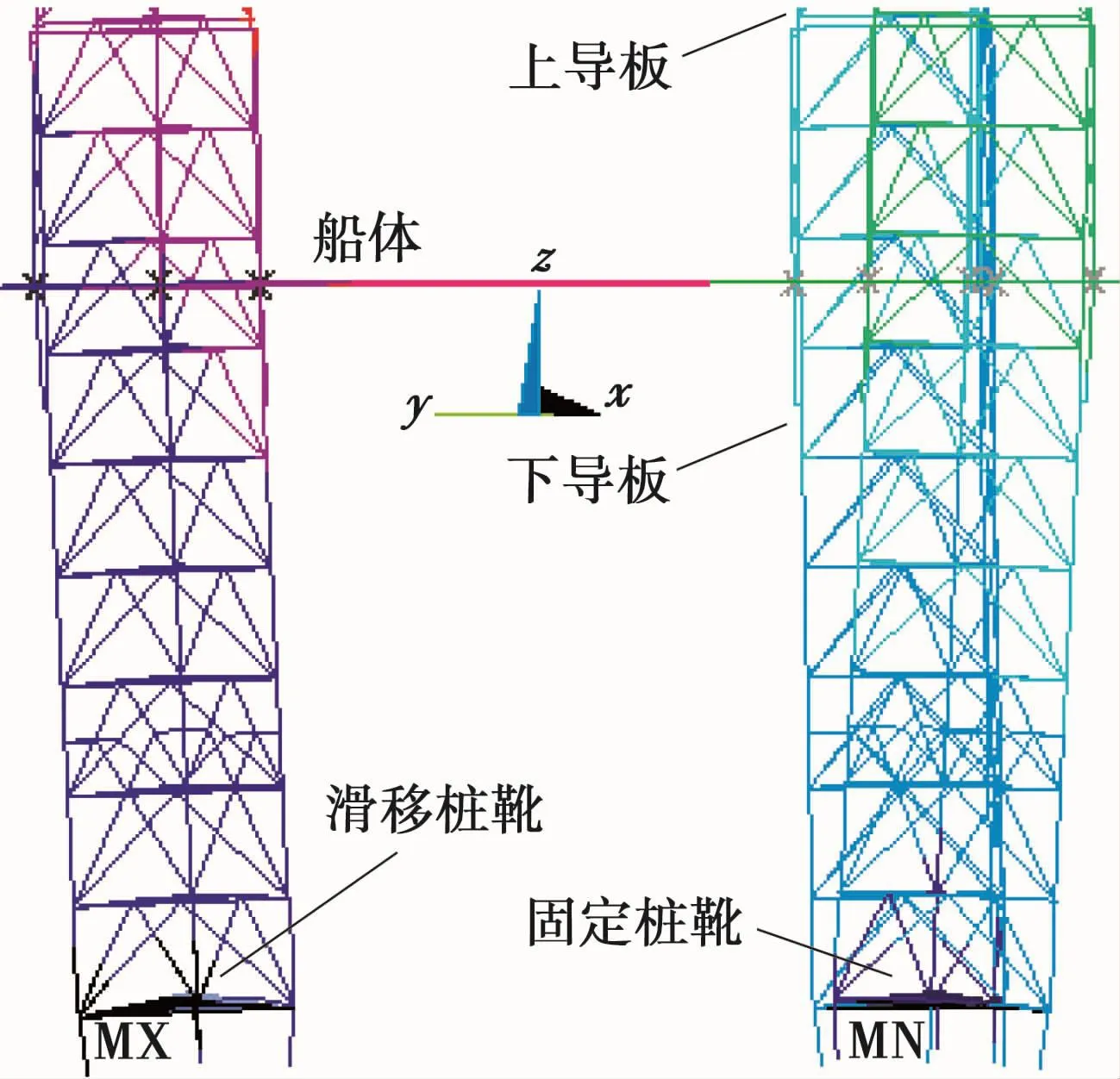
图3 罗布雷300型平台整体有限元模型
2.2 桩腿与导向板接触区局部模型
为确定监测的定量指标,建立桩腿与导向板接触区局部模型。局部模型包括下导板结构及导板以下5 m、导板以上10 m桩腿结构,导板与桩腿接触部位按接触建模。
从整体模型中提取模型涉及桩腿部分的位移和转角,施加到局部模型相关部位,作为桩腿约束的边界条件,导向板的边界条件为横支撑板及肋板末端取全约束。
3 位移监测技术
3.1 位移分析
罗布雷300型平台3条桩腿的变形如图4所示。由图4可见,当平台桩靴发生滑移时,主要是下导向板以下桩腿发生倾斜,斜度超过1.5°;如果导板与桩腿的间隙保持为设计值,且平台保持基本水平,则桩腿在上下导向板之间保持垂直;桩腿在上导向板以上保持了倾斜的趋势,但倾斜角只有0.4°左右,所以监测平台滑移的方法之一是测量下导板以下桩腿的变化。以此为依据设计了桩腿倾斜监测装置,即在桩靴上部的撑管处设置了信号发射器、信号反射器和姿态传感器,可根据信号在水中的发射、接收的时间判断桩腿之间的距离,同时借助于姿态传感器判断桩腿倾角[5]。利用图2所示流程分析不同水深桩靴许可滑移距离,结果如图5所示。
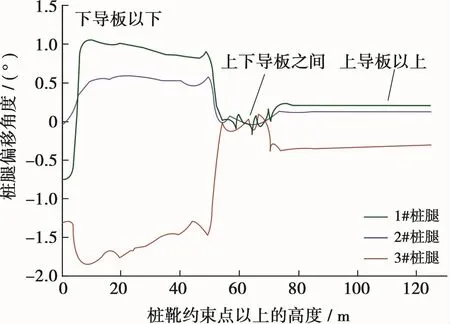
图4 罗布雷300型平台桩腿偏移角度
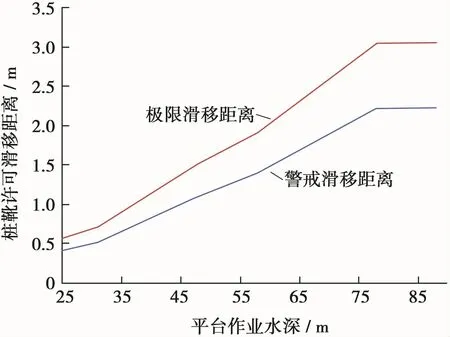
图5 罗布雷300型平台不同水深桩靴许可滑移距离
虽然监测平台桩靴滑移的位移测量能够最直观地反映插桩过程中是否滑移及滑移量大小,且适合于所有的平台类型,但是位移测量需要复杂和昂贵的水下测量和声波水下传送设备,且经过初步试验认为其水下无线数据传输的效果受到多种因素的影响不稳定,因此该方法的推广使用将受到一定限制。
3.2 桩腿接触载荷分析
取不同滑移方向时罗布雷300型平台3条桩腿的9根弦杆在下导向板处的载荷,如图6所示。模型中假设3#桩腿桩靴发生了滑移,因此3#桩各弦杆-导向板的接触载荷最大;计算得出桩靴向105~135°方向滑移时导板对半圆板的压力最大,这与实际发生变形的弦杆是一致的。
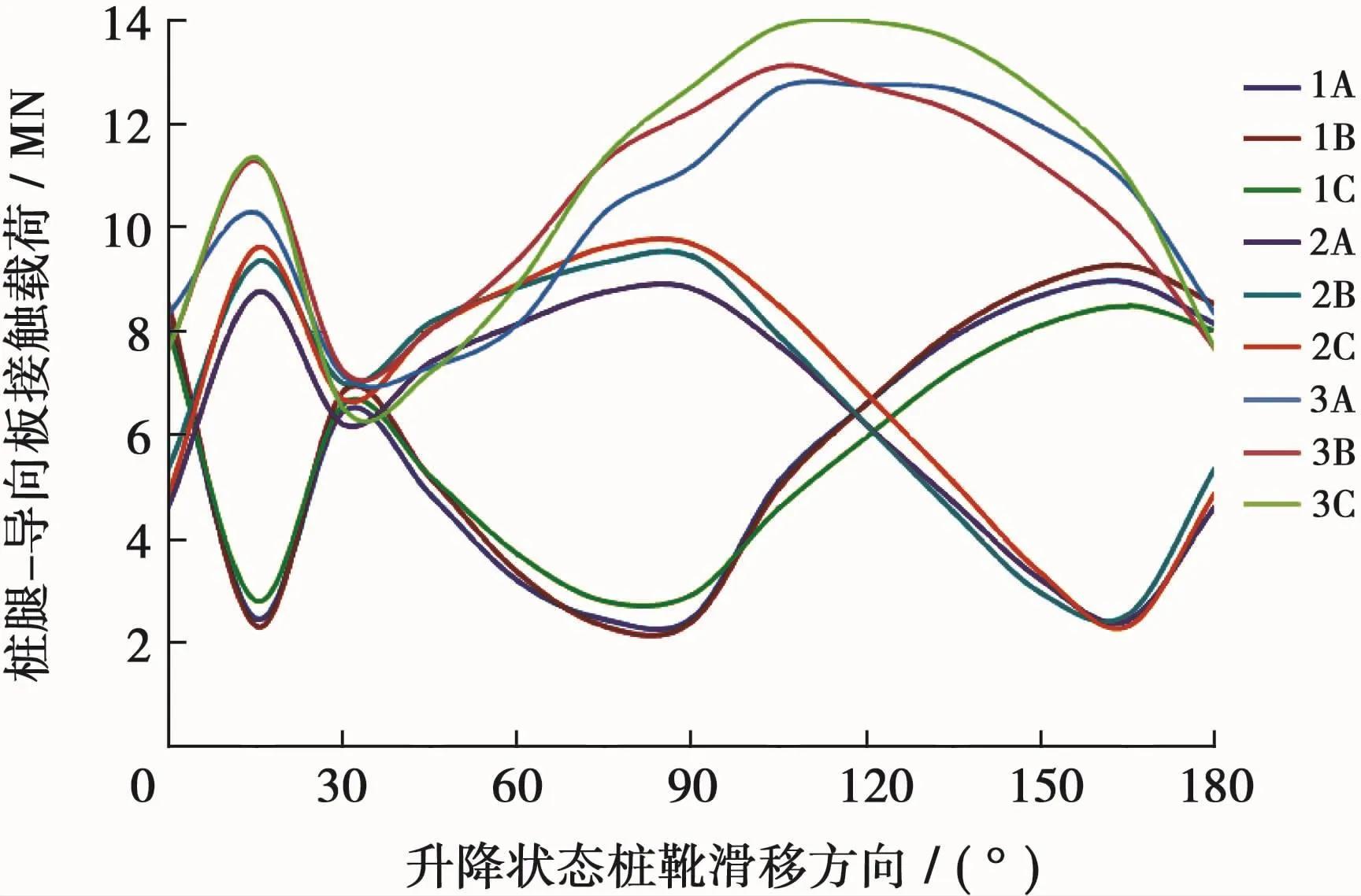
图6 不同滑移方向时罗布雷300型平台桩腿-导向板接触载荷
3.3 桩腿升降装置载荷分析
罗布雷300型平台的升降装置为齿轮轮系,为弹性体组合,在平台基本设计中每套升降装置承受的载荷是不同的[6]。当平台承受环境载荷、作业载荷或发生桩靴滑移时,部分升降装置承受的载荷可能大于其额定升降载荷,因此需要进行各桩腿升降载荷分析。图7为罗布雷300型平台3#桩腿沿135°方向滑移时3B弦杆的上、中、下等3套升降装置的载荷图,可以看出:当滑移距离接近0.8 m时,该弦杆下部升降装置的载荷超标(为400 kips);而当滑移距离到达1.5 m时,该弦杆的3套升降装置载荷都超标,虽然没有达到极限升降载荷(为800 kips),但依然可对电机、齿轮齿条等造成损伤。因此,在插桩和升降过程中监测每套升降装置的电流或输出扭矩,可以在一定程度上预测桩靴滑移,及时采取措施保护升降装置和桩腿结构。
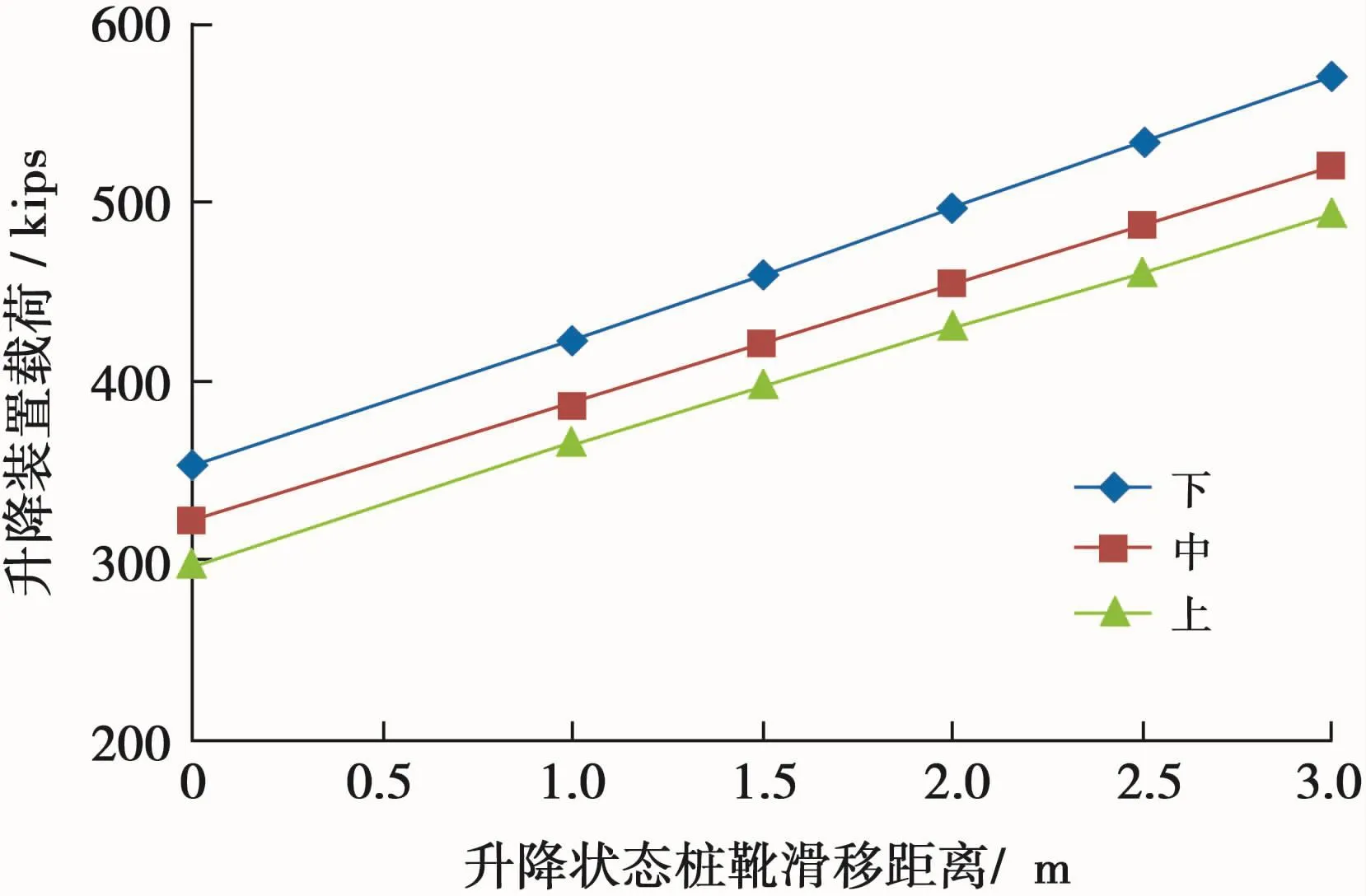
图7 罗布雷300型平台3#桩腿沿135°方向滑移时升降装置载荷
4 应变监测技术
4.1 桩腿弦杆与导向板的二维平面应变模拟分析
为明确半圆板变形原因,首先建立了罗布雷300型平台桩腿弦杆与导向板的二维平面应变有限元模型,按接触模式进行模拟。
弦杆半圆板的材料为ASTM 514,其弹性极限取为690 MPa,按双弹性模式模拟材料的弹塑性。模型中假设导向板为刚性并对其施加全约束,在弦杆的齿条板处施加x、y方向载荷,计算半圆板的应力、应变状态。随着载荷增大,半圆板发生局部的塑性变形,如图8所示。通过对结构、计算迭代过程和结果进行分析,认为该罗布雷300型平台半圆板变形是结构屈服所致,即桩靴滑移导致结构超载。
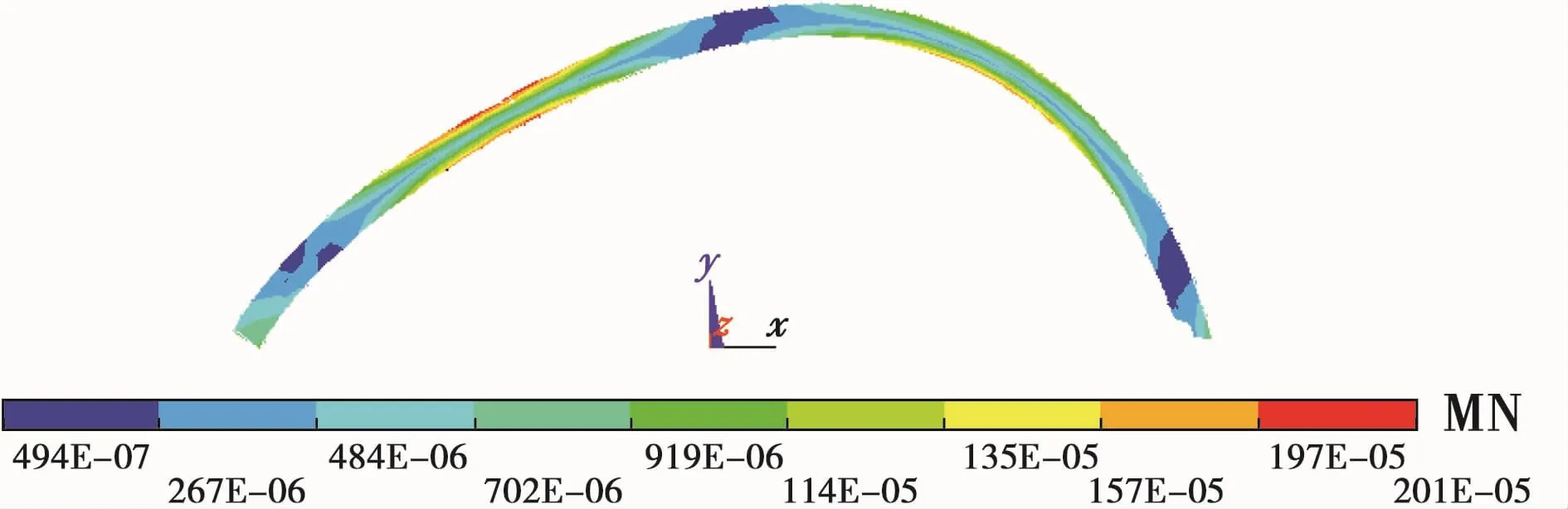
图8 罗布雷300型平台桩腿半圆板塑性变形图
4.2 导向板结构应变云图分析
根据各工况导向板结构的应变云图(图9)可知,肋板上的应变要高于导向板背面的应变,在肋板处有应变变化较为缓慢的区域,因此可以通过在肋板贴应变片来分辨半圆板的应力变化,从而判别导向板对桩腿的压力及桩腿倾斜程度。根据有限元分析,当罗布雷300型平台导向板两侧肋板应变达到-0.8×10-3或中间肋板应变达到-0.5×10-3时桩靴滑移达到警戒线,此时应停止插桩压载并采取相应措施(现场作业时通常采取更保守的控制指标)。
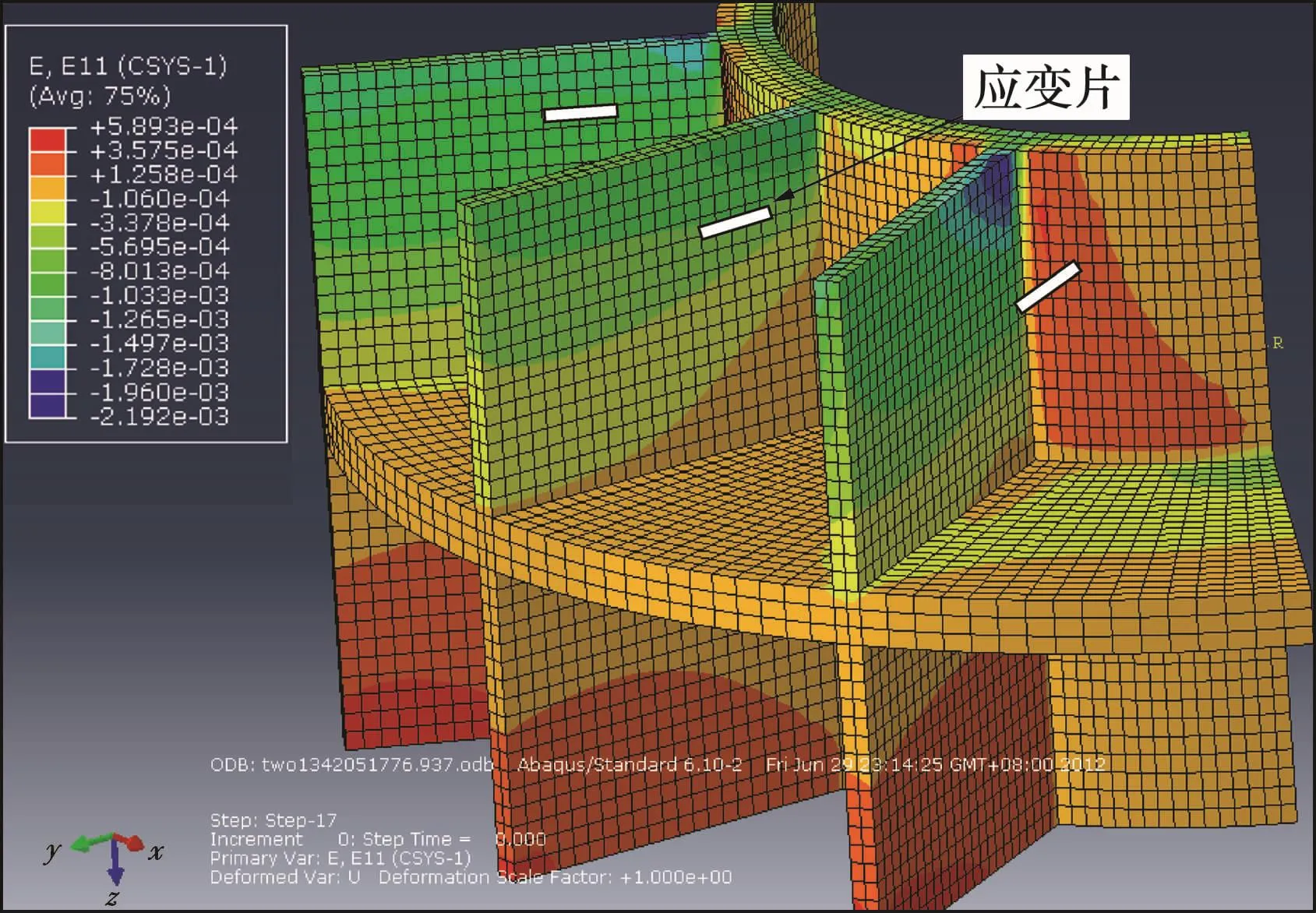
图9 罗布雷300型平台导向板结构应变云图
5 结束语
海上油田老脚印的存在使得平台在附近位置插桩就位时存在极大的滑移风险,桩靴滑移将严重影响桩腿及平台结构安全,因此“踩脚印”插桩作业时应采取措施实时监测桩靴滑移。通过对罗布雷300型平台“踩脚印”作业实施有限元模拟,定量考察桩腿结构的变形、船体上下导向板处的载荷及升降装置载荷,提出了监测桩靴滑移的位移检测和应变检测技术,并给出了定量的判别参数。目前应变检测技术已在罗布雷300型平台取得成功应用,并将逐渐推广到其他能够安装应变测量装置的平台。
[1] HSE(Health and Safety Executive).Guidelines for jack-up rigs with particular reference for foundation integrity[R].Research Report 289,2004.
[2] GAN C T,LEUNG C F,CHOW Y K.A study on spudcan footprint1[R].6th Southeast Asia Geotechnical Conf.,Kuala Lumpur,2007,735-740.
[3] 宋林松,王建军,黎剑波.自升式平台压载量的准静态计算方法应用研究[J].中国海上油气,2010,22(3):193-196.
[4] 王建军,宋林松,黎剑波.自升式平台作业适应性分析[J].船舶工程,2010,32(5):63-66.
[5] 赵景芳,王建军,宋林松.一种自升式平台桩腿倾斜监测装置:中国,201120561305.1[P].2012-08-15.
[6] SNAME(2002):Guidelines for site specific assessment of mobile jackup units[R].T&R Bulletin 5-5 A,1st Edition-Rev.2,Society of Naval Architects and Marine Engineers,New Jersey.
Real time monitoring method research on jack-up spudcan sliding:a case of RobrayR300 rig
zhao Jingfang
(China Oilfield Services Limited,Hebei,065201)
To mitigate the potential risk of structure damage by spudcan sliding,real time sliding monitoring method is studied.Global finite element model of RobrayR300 rig is constructed to analyze the leg displacement and rotation,loads on the leg-guides and on the elevating gears induced by the sliding.Local models on contact zones of leg-guide are also established to calculate strain distribution on guides when stress on legs reaches its material elastic limit.Accordingly,methodology on displacement monitoring of legs and strain measurement of guides is put forward.The calculation demonstrates the obvious leg tilt under the lower guides,over-high loads on elevating gears and strain smooth transition area on the ribs of the guide,which could be used to invert calculating and provide the monitoring criterions of spudcan sliding.
jack-up;spudcan sliding;leg;guide;displacement measurement;strain measurement;Robray R300 rig
赵景芳,男,高级工程师,1996年毕业于石油大学(华东)钻井工程专业,现任中海油田服务股份有限公司钻井事业部副总经理,一直从事海洋石油钻井作业、管理及技术研究工作。地址:河北三河市燕郊开发区海油大街18号(邮编:065201)。E-mail:zhaojingf@cosl.com.cn。
2013-04-21改回日期:2013-06-22
(编辑:叶秋敏)