基于无线传感网的水下地形监测系统设计
2014-08-06高申勇刘春平张海波
高申勇,刘春平,张 颖,张海波
(1.浙江水利水电学院 信息工程与艺术设计学院,浙江 杭州 310018;2.杭州电子科技大学 计算机学院,浙江 杭州 310018)
0 引 言
大型水库和航道等水域在建成投产后,险滩险段的水下地形监测对安全生产至关重要.由于进水中含有泥沙,在波浪和水流的作用下会沉淀到水底而形成泥沙界面,如果这些泥沙界面长期不加清理,就会逐渐上升,形成险滩险段,对水利、防洪或者工业生产造成不利的影响.目前水库和航道等一般需要采用人工测船定期定点测量,以便获取水下泥沙层的分布情况,根据测量情况决定是否应该进行清理.这种方法测量周期长,测量点数有限,需要耗费大量的人力物力,而且无法做到实时测量[1-2].无线传感器网络以其低功耗、低成本、分布式和自组织的特点带来了信息感知的一场变革,传感器节点通过自组织的方式构成无线传感器网络,能够实时监测、感知和采集网络分布区域内监视对象的各种信息并加以处理,完成对环境的数据采集和监测任务[3].本文基于无线传感器网络技术设计的水下地形监测方法,解决了传统人工测量方法带来的一系列问题,可广泛用于水库、河道水下泥沙界面的长期实时监测,相比现有的监测方法,具有监测数据无间断、效率高、成本低等特点.
1 方法描述
1.1 主要思想
基于无线传感器网络的水下地形监测方法的具体思想如下:首先部署在水面上的传感器节点通过二维平面定位算法计算平面二维坐标,随后,节点借助超声波测距传感器等辅助设备获取自身所在水域的水深作为垂直方向的坐标,最后对所有节点的三维坐标进行曲面拟合,从而绘制水下地形图,完成对水底地貌的三维重建.
1.2 具体流程描述
基于无线传感器网络的水下地形监测方法可分为以下5个步骤.
1.2.1 部署节点
无线水深测量节点均匀地部署在需要监测的目标水面,该节点为自行设计制造的传感器节点,能以浮标的方式固定在水面上,具体设计如2.2小节所述.由于水面的部署环境较好,可将节点间均匀分布,使每个节点间的距离相近,记录节点间的平均距离,这样能够尽量减少节点平面二维定位产生的误差.在这些节点中包含少量已知坐标的锚节点,其坐标通过GPS测量或者人工测量.
1.2.2 节点平面坐标的计算
无线传感器网络中计算节点平面坐标的二维定位算法已得到广泛的研究和应用,这里采用定位精度较好和成本低的MDS-MAP算法计算节点的平面坐标[4].MDS-MAP算法采用了多维尺度分析(Multidimensional Scaling,MDS)技术,具体方法如下:
首先利用节点间的连通性得到节点的拓扑图,每个节点间的距离通过平均每跳距离和它们之间的最小跳数关系计算,其中,平均每跳距离已知,节点间的最小跳数采用最短路径法计算;然后将所有节点间的两两距离采用距离矩阵表示,对距离矩阵用经典的MDS算法进行分析,计算出节点的二维相对坐标,根据锚节点和相对坐标MDS图的关系进行坐标转换,就能够计算出节点的二维平面的绝对坐标.
1.2.3 垂直水深坐标的计算
1.2.4 曲面拟合
当所有节点计算得到三维坐标后,将所有离散点的三维坐标进行曲面拟合,即可重建水下地形三维表面图.
2 系统设计
2.1 无线水深测量节点
基于系统的功能需求及无线传感器网络的特点,所设计的系统体系结构(见图1).

图1 基于无线传感器网络的水下地形监测系统
以浮标的方式浮于水面的无线水深监测节点组成一个传感器网络,所有的子节点布置在需要监控的区域,子节点周期性地采集水深数据,并以无线多跳的方式把数据传输给汇聚网关节点,然后由汇聚网关节点将测得的数据传送给中央服务器存储,最终用户能够通过上位机客户端程序查看目标水域的水下地形.因此系统必须提供与远程网络交互的能力,根据无线水深测量节点分布的特点,本文设计了一个由感知层、传送层和应用层的三层结构构成的水下地形监测系统[5].
(1)感知层
无线水深测量节点先获取二维平面定位所需要的有效信息,然后测量水深,组网将数据传输到汇聚网关.节点通过IEEE802.15.4协议形成多跳的通信网络,尽可能地将信息数据传送到汇聚网关.
(2)传输层
汇聚网关主要完成数据汇聚转发和通信协议的解析转换.网关将从感知层接收到的数据按所设计的协议字段解析后重新封装,考虑传感器节点数量多、数据采集频率高且允许出现偶然丢包的特点,采用UDP协议将数据包转发到中央服务器.
(3)应用层
中央服务器是监测系统和外界通信的桥梁,服务器程序将系统获得的数据按协议解析后存储到相应数据库表中,用户可通过Web界面进行查阅.这种结构允许用户通过网络远程查看水下地形变化情况.
2.2 硬件设计
所设计的无线水深测量节点由TelosB节点模块、超声波测距传感器模块、串口通信电路模块及倾角检测电路模块组成(见图2),节点采用特制的防水外壳,能够以浮标的方式浮在水面上,节点的水深测量范围为0.2~10 m,通信范围在空旷地区可达到200 m.
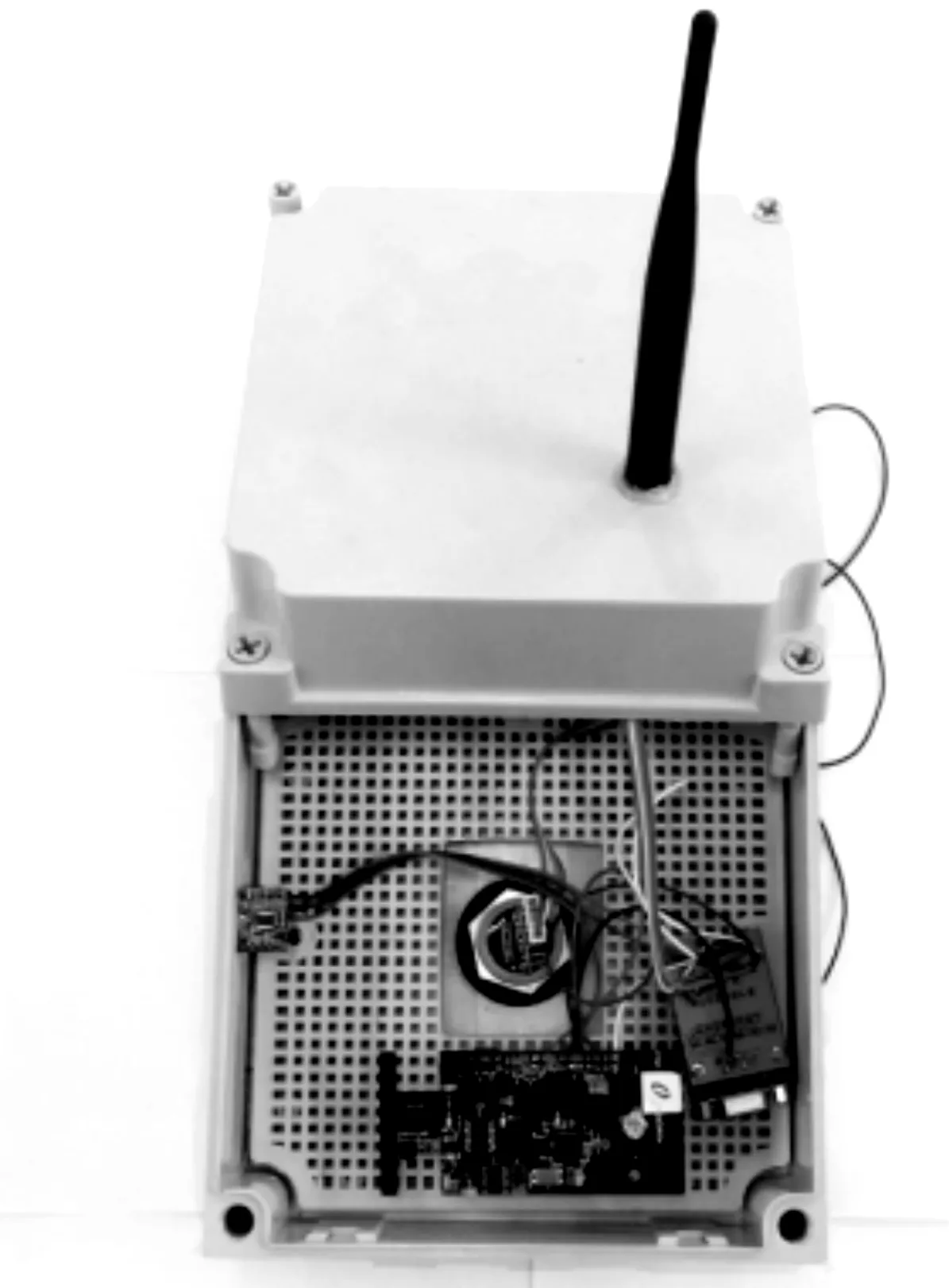
图2 无线水深测量节点
(1)TelosB节点模块.该模块是专为无线传感器网络设计的超低功耗通用节点[6].主要由数据采集单元、数据处理单元、无线通信单元和电源管理单元.同时模块提供了丰富的扩展接口,如模块上的MSP430F1611微处理器提供了UART接口,多个数字I/O接口和模数转换ADC接口等.无线水深测量节点在上述电路基础上开发接口电路,实现与连接各种传感器电路连接构成系统电路.
(2)超声波测距传感器模块.模块采用防水型超声波测距传感器,它的精度高、性能稳定,能抵御各种天气因素的干扰,适应室外监测.同时模块具有自动校正,实时去噪等功能,并提供RS232串口信号输出接口.
(3)串行通信电路模块.主要用于RS232串行通信TTL电平和EIA电平的转换,使TelosB节点模块正确地接收到超声波测距传感器模块的数据.
(4)倾角检测电路模块.该模块基于三轴加速度传感器开发,主要用于实时检测节点的倾斜度,利用测量值校正因水面波浪导致模块倾斜产生测量的误差.
2.3 软件设计
该软件平台可分为5个模块,分别为底层节点测量模块、传输模块、处理模块、数据库存储模块、Web客户端模块.各模块的功能如下.
(1)节点测量模块
分为平面测量阶段和深度测量阶段两个部分.平面测量阶段的目的是得到节点间的最短距离矩阵,首先每个未知节点维护一张邻居表,通过发送邻居节点探测包,将每个节点附近的邻居节点的ID号存入到邻居表中;深度测量阶段则通过超声波测距传感器测得水面到水底的深度,然后通过倾角测量传感器校正,得到节点所处位置的水深信息.将两个阶段得到的信息存放到发送队列中.
(2)传输模块
主要节点测量模块中负责将坐标计算的信息传送到处理模块.所有节点采用CTP(Collection Tree Protocol)多跳路由协议传输数据[7],完成数据发送和转发的功能.
(3)处理模块
主要负责坐标计算,首先将收到数据包中的信息解析,然后用MDS-MAP算法处理数据得到节点的全局二维坐标,将各节点的水深信息加入到坐标中,得到每个节点的三维坐标.
(4)数据库模块
本模块的作用主要是有效地存储节点坐标的历史数据,包含历史库和实时库.历史数据库可以提取不同时间段内的历史数据,而实时库则可显示当前每个节点的坐标变化情况.
(5)Web客户端模块
Web客户端模块软件基于JavaEE开发,管理用户能够通过Internet登录查看.系统可由地图和卫星图两种模式查看节点监测区域的部署情况,通过参数设置能够管理和查看每个节点的信息,对节点信息与所采集的数据进行定性的分析,提供报警功能;当节点的数量达到一定值时,则可运用曲面拟合算法处理数据,重建水下的三维地形图,制定确保水利安全的生产方案.
4 系统测试与仿真
由于实际环境大规模部署的成本限制,本节首先通过部署少量节点进行系统验证,然后再通过Matlab仿真拟合出最终结果,验证基于无线传感器网络的水下地形监测方法的可行性.
首先进行系统测试,作为研究需要,试验安排在校园内某个湖泊进行.在湖泊内选取5个测量点部署无线水深测量节点.系统进行了长时间的运行测试,客户端界面数据显示系统运行良好,节点地图的部署测量信息情况(见图3).
每个节点数据采样间隔设定为15 min,每次采样10次数据计算平均值,取1 002号节点在10 h内收到的数据画统计图(见图4),经计算1 002节点所在区域水深约为1 530 mm.通过这种方式,就能够得到所有节点的深度坐标.

图3 节点部署测量信息显示图

图4 1002号节点数据统计图
如果增大节点的部署密度,就可以通过该方法实现水下地形表面的三维重建工作.为了更加直观地展现研究结果,本节又利用Matlab软件进行仿真实验.仿真场景为在100 m×100 m×100 m的区域内部署100个节点进行定位,通过节点测得的三维坐标进行水下三维表面地形的重建.在仿真区域内以水平10 m为间隔,水深采用10~30 m之间的空间均匀分布离散点(见图5),将这些空间离散点进行曲面拟合,就能够得到一个地势起伏的水下三维表面地形(见图6).
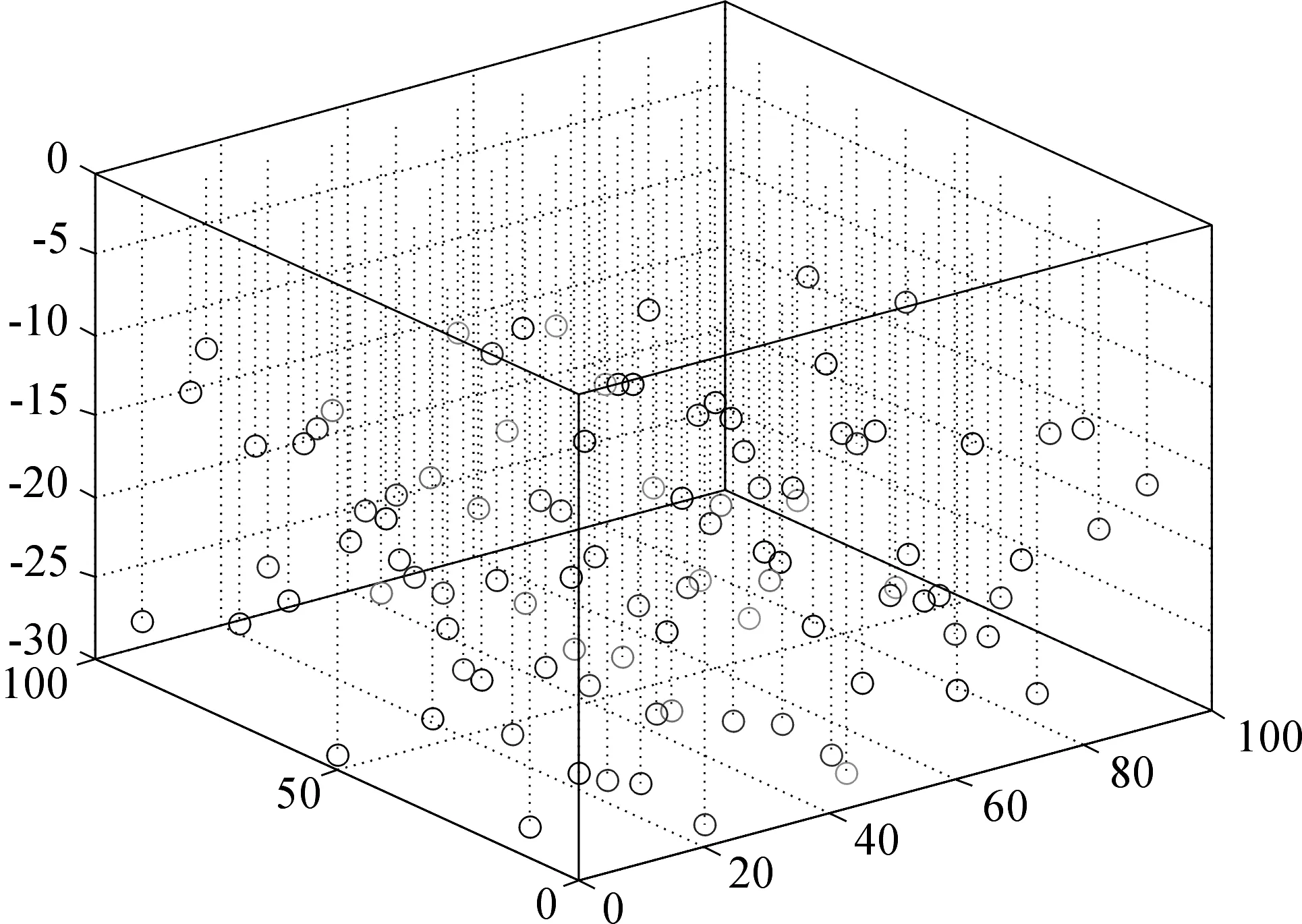
图5 三维表面空间离散点
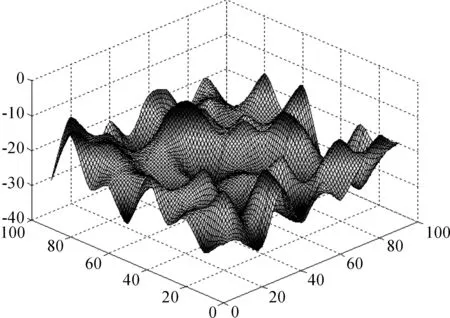
图6 空间离散点拟合的曲面
5 结 语
试验和仿真结果表明:本文设计的基于无线传感器网络的水下地形监测方法能够获得水下三维表面的地形信息,而且具有部署方便、成本低、实时性好等优点,是一种可行有效的方法.采用该方法监测水库、河道等水域的险滩险段,监测部门可以实时获得这些地区的水下淤积界面,从而有效避免因水深变化而产生的安全事故,具有重要的实际意义.
参考文献:
[1] 韩其为,杨小庆.我国水库泥沙淤积研究综述[J].中国水利水电科学研究院学报,2003,1(3):169-178.
[2] 刘树东,田俊峰.水下地形测量技术发展述评[J].水运工程,2008(1):11-15.
[3] AKYILDIZL F,SU W, SANKARASUBRAMANIAM Y, et al. Wireless sensor networks: a survey [J]. Computer networks,2002,38(4):393-422.
[4] 高 峰,俞 立,张文安,等.基于无线传感器网络的作物水分状况监测系统研究与设计[J].农业工程学报,2009(2):107-112.
[5] SHANG Y, RUML W. Improved MDS-based localization[C]//INFOCOM 2004. Twenty-third AnnualJoint Conference of the IEEE Computer and Communications Societies. IEEE, 2004(4):2640-2651.
[6] 李 扬.基于超声波测距的船舶液位检测系统[D].重庆:重庆大学,2012.
[7] GNAWALI O, FONSECA R, JAMIESON K, et al. Collection tree protocol[C].Proceedings of the 7th ACM Conference on Embedded Networked Sensor Systems. ACM, 2009: 565-579.
