面向残障人士的智能家居引导系统
2014-08-06钱月康潘欣裕陈宏庆
钱月康 / 潘欣裕 / 王 俭 / 陈宏庆
1.苏州科技大学电子与信息工程学院, 江苏 苏州 215009 2.江苏国贸酝领智能科技股份有限公司, 江苏 苏州 215011
1 引言
随着我国社会经济与文明建设的迅速发展,人口老龄化、残疾人和病人绝对数量增大等带来的特殊人群生活质量下降的问题,到了必须解决也具备条件解决的关口。提高老、残、病等人群的物质和精神生活水平,对于维护个人尊严、共建和谐社会,具有重要的意义。
智能家居是近年来出现的旨在提高人们生活质量的一种新型高科技信息化住宅应用系统。最早的智能家居建筑实例是在1984年由美国联合科技公司建造的City Place Building。自那之后,智能家居的发展便呈现不可阻挡之势,并快速地成为了当今的一个热点,其中典型代表就是比尔﹒盖茨的豪宅。主要产品有微软的“梦幻之家”、IBM的“家庭主任”、摩托罗拉的“居所之门”等。国内企业在此方面的研究也初具成果,海尔的“e家庭”与清华同方的“数字家园”都是比较成功的案例。去年,佛罗里达大学的Sumi Helal博士在学术报告中介绍了他的Gator Tech智能别墅与明德智能家居等研究成果[1-2],其中涉及了智能地板的构想。德国波茨坦普拉特拉学院的团队还制做了一块8m2的高分辨率智能压感地板。
将智能家居的研究与应用紧密地和残、病、老、弱人群的生活相结合,把智能家居深入引向特殊需求的人群,无疑是一个极具探索价值和研究意义的课题。本文介绍一种面向残障人服务的智能家居引导系统验证性实验样机。该样机既能够感知自然人和其他物体的位置及其变动,也能够利用技术手段对残、病、老人进行引导。
2 总体设计
本文将老、残、病、弱者等统称为残障人。在文中研制的智能家居引导系统样机中,采用轮式小车替代残障人。轮式小车必须是“低智能”的,即有且仅有一种对环境的感知能力(如光、磁场、声波、色度等),有且仅有两种简单行走能力(如仅能前进和转弯),有简单表达目的地的能力(如用手指点击表示某个目的地的按钮、软键或图标)。
2.1 设计理念
残障人的特点是智力、行动能力、视力、听力或其他感知力减弱,甚至情绪控制力不强。但是,残障人希望自食其力、自立于社会,和健全人相互尊重、平等相处。因此,引导系统向残障人提供的服务也应该遵循平等和尊重的原则。本文介绍的智能家居引导系统样机,不仅应该具有较强大的感知、决策、引导能力,而且这种引导服务首先应该是不过度的、人性化的、自然的、易执行的。
2.2 信息流模型
在面向健全人的智能家居系统中,环境、决策中心和人之间的主要信息流模式如图1所示,决策中心从环境和健全人获取较丰富的信息,在判断和决策后对健全人发送服务信号,同时环境也可以根据决策中心指令为健全人提供服务。
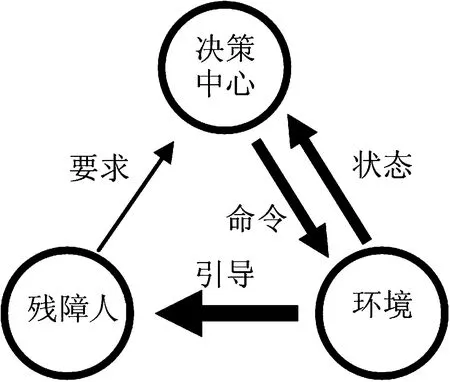
图1 一般智能家居系统信息流模式
然而,在一个面向残障人的智能家居引导系统中,信息流模式则应该如图2所示。决策中心必须主要依靠从环境获取信息,在判断和决策后,也必须主要借助于环境向残障人提供引导服务。
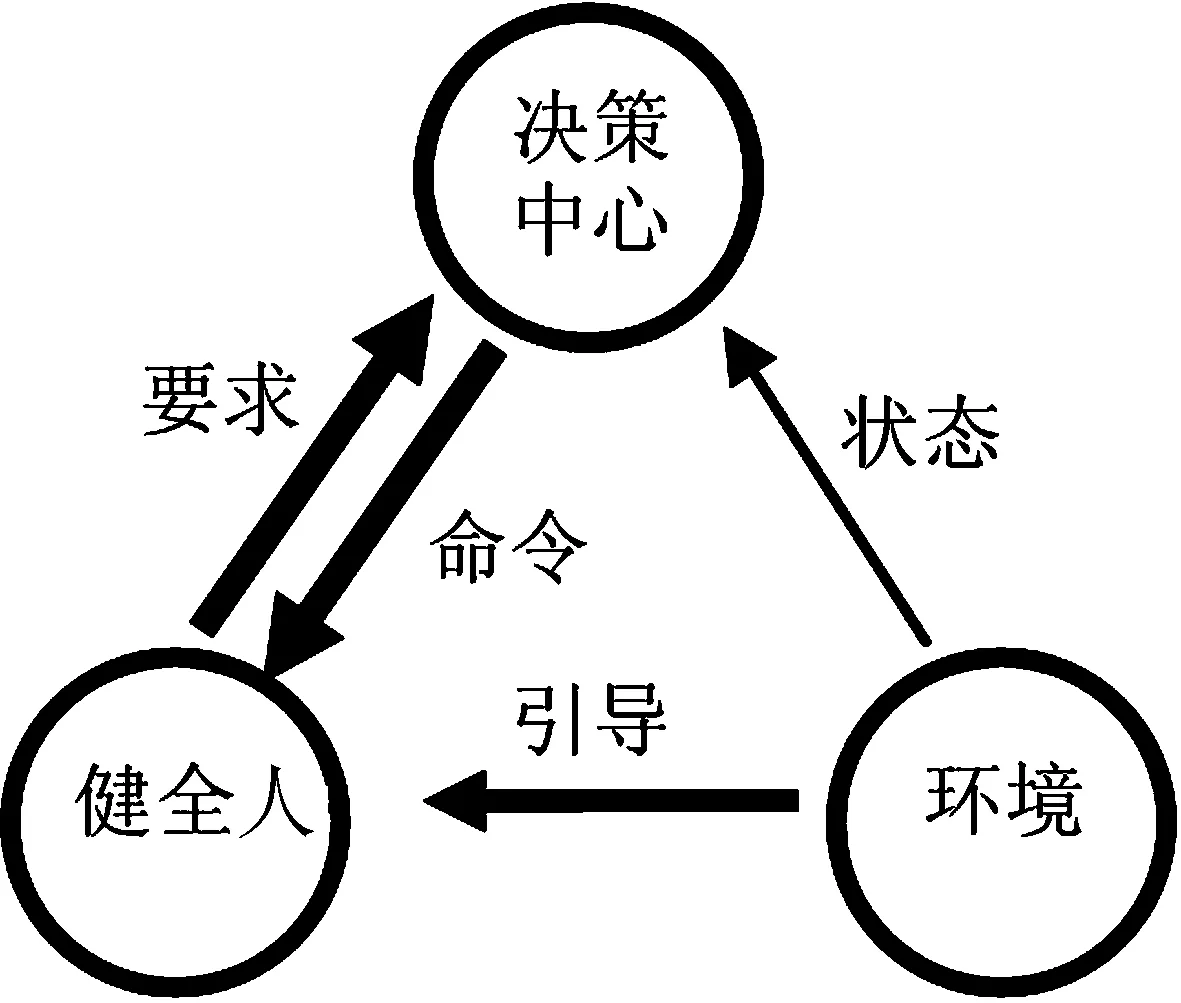
图2 面向残障人智能家居的信息流模式
显然,在传统智能家居系统中,决策中心和环境两者与健全人的信息交互几乎是并重的。而本文则承认并重视残障人能力弱化的事实,更重视环境的智能化和人性化、以期依靠高智能环境与残障人的交互来实现对弱能力残障人的帮助和服务。
2.3 “跬步”引导模式
残障人通常难以按照系统一次提供完整路径的方式,在移动障碍物环境中进行连续较长距离的行走。对残障人的引导,必须是足够简单和有效的,即能够被残障人理解、接受并执行的。虽然决策中心每次均完整地规划出从残障人所在地点到目的地的可行且最短路径,但是地板向残障人提供的引导信号只能是整条路径的一小段甚至一小步。
将决策中心规划出的从残障人所在位置到目的地的完整路径拆分成一小段一小段的路径,由地板提供给残障人的引导信号仅仅是需要残障人当下完成的那一小步所走的路段。本文将这一模式称之为跬步引导模式。它贯穿于残障人行动的起始点到目的地的整个过程中。跬步引导除了使长距离连续行走任务化简为单步行走任务以外,还可以及时规避环境中的移动障碍物,当然这需要实时路径规划模式及策略的实施。
2.4 系统架构
引导系统由三大主功能模块组成:残障人、智能地板和决策中心。系统主功能模块架构(图3)设置按照“信息流”设想,刻意降低引导系统对残障人的智能水平和身体机能的要求,加强智能地板与决策中心之间的信息交互。

图3 系统主模块架构
3 实验样机主要功能及其应用
3.1 地板本体及功能
引导系统中智能地板的功能模块框图如图4所示。地板采用木制底座,外观参见图5。地板的尺寸需结合小车尺寸、转弯半径与容错空间等因素综合考虑确定。地板材料采用透明有机玻璃板,以保证光引导方式的可视效果。

图4 智能地板功能框图
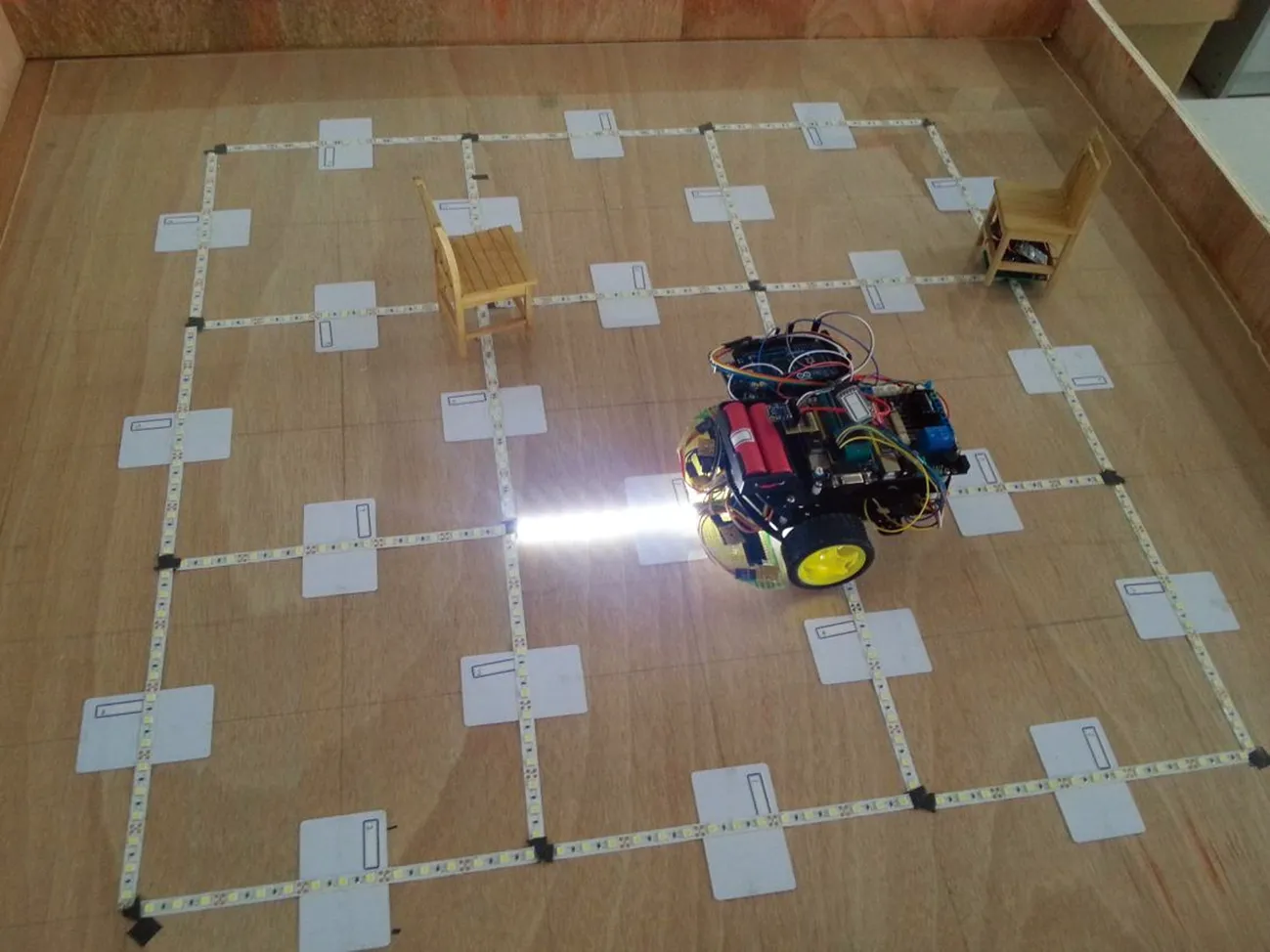
图5 引导实例
3.2 地板对物体的感知和引导信号显示
地板上物体的定位采用通用的RFID技术[3],感知模块由安装在地板木制底座上的固定无源RFID和物体携带的读卡器组成。地板上共敷设24块标准RFID空白卡,决策中心可以接收各个RFID读卡器通过蓝牙无线方式发来的编码信息实现对小车(残障人)和家具等物体的位置监控。
参考其他设计,用普通光带实现疏散引导,引导模块利用LED灯带实现。24条灯带以正方形棋盘格的形式排列,每一次只能有一条灯带点亮,负责引导小车移动过程中的一小步。
3.3 小车的视觉和行走
为使小车能够进行光带循迹,在小车前部装有5路感光探头,探头的灵敏度可以调节。双驱小车可以通过分别调节两只轮子的转速,实现行走。
3.4 典型引导例描述
首先残障人自己在用户界面中指出想去的目的地,接着残障人便看到地板上自己身前很近处的一段点亮的光带,残障人即在此信号的引导下移动一小段。在这样的一小步一小步“积跬步”——移向目的地的过程中,决策中心每次根据监测到的残障人和地板上其他物体当前的实际位置,动态规划出避障且完整的路径,并通过智能地板向残障人发出跬步引导信号。
对残障人来说,他们完全不会察觉决策中心每次规划路径的改变,也不需要在行进中自主地考虑避让障碍物,只需要重复跟随跬步引导信号行进就可以顺利到达目的地。
4 样机系统的软件
4.1 用户界面
决策中心的环境地图界面(图6)中,黑色线条表示灯带,绿色方框表示小车当前位置,红色方块表示目的地,三角形表示障碍物。软件界面右侧红字展示小车刷卡模块读到的卡号。启动软件后鼠标点击某一段黑色线条即可预置红色方块,随即引导开始。接着可以看到绿色方块开始逐格移动,依次到达相邻黑色线条的中点。当绿色方块到达红色方块(距离为黑色线条长度的一半)后,引导完成。
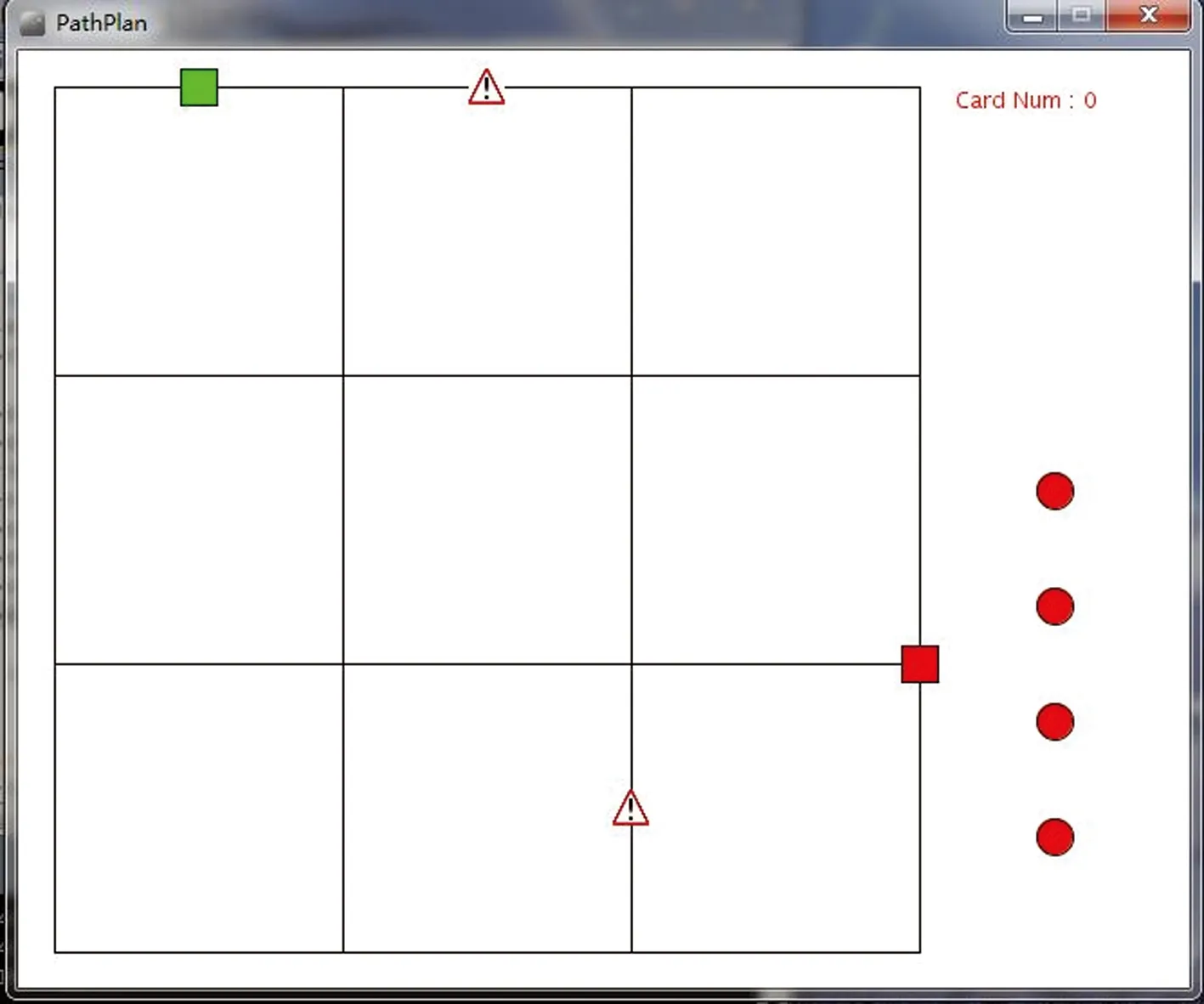
图6 用户界面
4.2 路径规划策略
与跬步引导模式相匹配的实时路径规划策略遵循五个原则:(1)被引导对象不能往回走;(2)新一次路径规划的总距离应当尽可能短于前一次的总距离;(3)对障碍物的规避拥有最高优先级;(4)跬步引导的下一位置不能是障碍物的位置;(5)当行走出错,系统接收到的被引导对象的新位置与预定引导位置不符时,系统能够根据当前位置再次规划路径,继续引导。
遵循上述原则,本文在“直角策略”和“斜线策略”(图7)两种路径规划策略中进行比较选择,图7中圆圈表示残障人当前位置。在这两种策略中,下一步路径规划所得到的完整路径,只可以由未被阴影覆盖的线段(路段)组成。
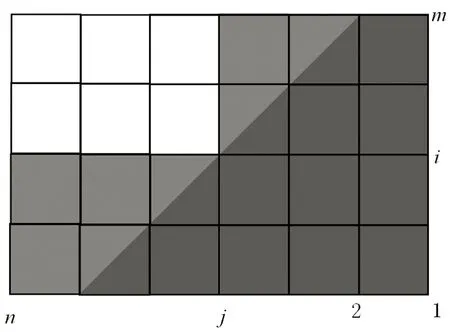
图7 两种规划策略
4.3 算法复杂度的比较
设残障人所处的矩形地板上有m×n个停留点(参见图6),假设残障人已在从起点(1, 1)到终点(m,n)的途中,正位于点(i,j)。如果将“直角策
略”算法在此位置进行路径规划的遍历量记为Nsquare(i,j),则“斜线策略”算法在此位置的遍历量Nslash(i,j)应满足式(1)。
Nslash(i,j)≥Nsquare(i,j)+
[Nsquare(i+1,j-1)+Nsquare(i+2,j-2)+…
+Nsquare(i+p,j-q)+]+
[Nsquare(i-1,j+1)+Nsquare(i-2,j+2)+…
+Nsquare(i-p,j+q)]
m-i (1) 比如,以图7为例,已知m=5,n=7,i=3,j=4,则依式(1)有Nslash(3, 4)-Nsquare(3, 4)≥Nsquare(4, 3)+Nsquare(5, 2)+Nsquare(2, 5)+Nsquare(1, 6),即“斜线策略”算法的遍历量约是“直角策略”的5倍。只要随机移动的障碍物较少,“直角策略”算法复杂度低且能够满足要求。 本文试制的智能家居引导系统样机的实际试验,验证其可以对残障人进行简明、可靠、有效的引导,证实本文阐述的面向残障人服务的特殊智能家居引导系统设计思想具有合理性与可行性。 在实际建筑物内部引入引导系统,考虑将射频卡、激光、红外,电磁,超声波等技术结合运用于定位和引导双重功能中,发挥它们无线、非接触的优点,并提高定位和引导的可靠性和精确度。另外,可以配置一个具有高精度行走机构和多传感器阵列的助残车,使引导效果更加理想。至于决策中心,希望用一个手机(或其他通用终端)APP程序可以实现。 [1] Sumi Helal, William Mann, Hicham El-Zabadani, eta. The Gator Tech Smart House: A Programmable Pervasive Space. Computer, Vol. 38, No. 3 (2005): 50-60. [2] Bellavista, Paolo, Axel Kupper, Sumi Helal. Location-Based Services: Back to the Future. Pervasive Computing, IEEE 7, No. 2 (2008): 85-89. [3] 李志.无线射频技术在智能家居中的应用[J].智能建筑电气技术,2010,4(2):18-21. [4] 李刚.建筑智能疏散引导信息化探讨[J].智能建筑电气技术,2010,4(4):88-91.5 结束语
