多故障网络控制系统模态依赖下的H∞控制
2014-08-05彭高丰
彭高丰
长沙师范学院 电子信息工程系,长沙 410100
多故障网络控制系统模态依赖下的H∞控制
彭高丰
长沙师范学院 电子信息工程系,长沙 410100
1 引言
网络控制系统是通过一系列的信道和节点构成一个或多个闭环控制系统[1]。与传统控制系统相比,网络化控制系统由于具有确定性的丧失、定常性的丧失、完整性的丧失和因果性的丧失等特性,导致系统存在数据随机丢包和时延等,同时网络控制系统中的传感器等会不可避免地出现失效等故障,以至系统不稳定,性能下降[2-4]。近年来针对网络控制系统的容错研究引起了国内外学者的广泛关注[5-8]。但对于数据随机丢包、时延和传感器失效等故障共存的网络控制系统进行综合容错控制至今还未见相关报道[9-15]。
本文首先针对网络数据随机丢包和时延同时存在的网络控制系统,建立了随机切换系统模型,运用鲁棒H∞容错控制方法,得到了网络控制系统模态依赖下渐近稳定且满足H∞性能指标的充分条件。然后拓展到了传感器失效的情况,建立了传感器失效模型,通过设计控制器,研究了系统稳定的条件,改善了闭环网络控制系统模态依赖下的性能。最后运用文中控制方法,对系统进行零状态响应仿真和方波响应仿真,仿真结论说明了该方法的有效性。
2 问题描述
考虑如下网络控制系统:

式中 x(k)∈Rn,u′(k)∈Rm,w(k)∈Rl,z(k)∈Rq,分别为系统状态、控制输入、外部扰动和被调输出,系统结构如图1。
对上述网络控制系统做如下假设:
(1)所有外部扰动的能量有限,即非零w(k)∈L2[0,∞]。
(2)系统对象完全可控,且状态可测。
(3)各个节点均为时间驱动,在新数据到来之前,控制器不输出新的控制量,而执行器维持原控制量不变。

图1 网络控制系统结构图
(4)k时刻传感器到执行器的时延为τk(τk∈N)个数据单包发送周期。
考虑网络数据随机丢包的存在,假设网络控制系统从传感器到执行器连续丢包个数不超过d个,由假设(3)知执行器接受到的控制量可能会连续执行1到d+1个周期。则系统在不同模态下的随机切换模型如下:
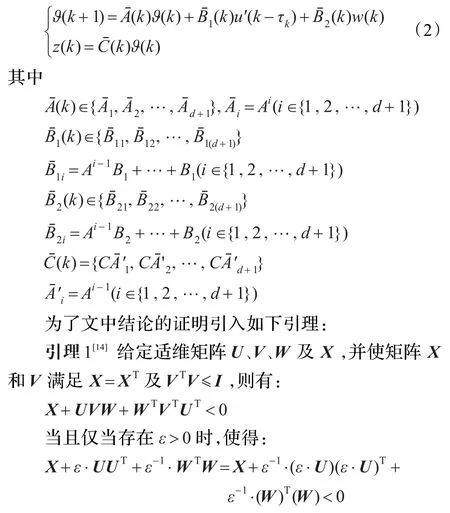
并作如下定义:
定义1鲁棒H∞容错控制是被动容错控制方法中的一种,也即把鲁棒H∞控制方法运用到网络化控制系统容错控制中,采用固定控制器来确保网络控制系统的完整性[15]。
定义2对给定的正常数γ>0,如果系统式(1)的外部扰动w(k)和被调输出z(k)之间满足||z(k)||2<γ||w(k)||2,则γ称为系统式(1)的H∞性能指标。
3 主要结果
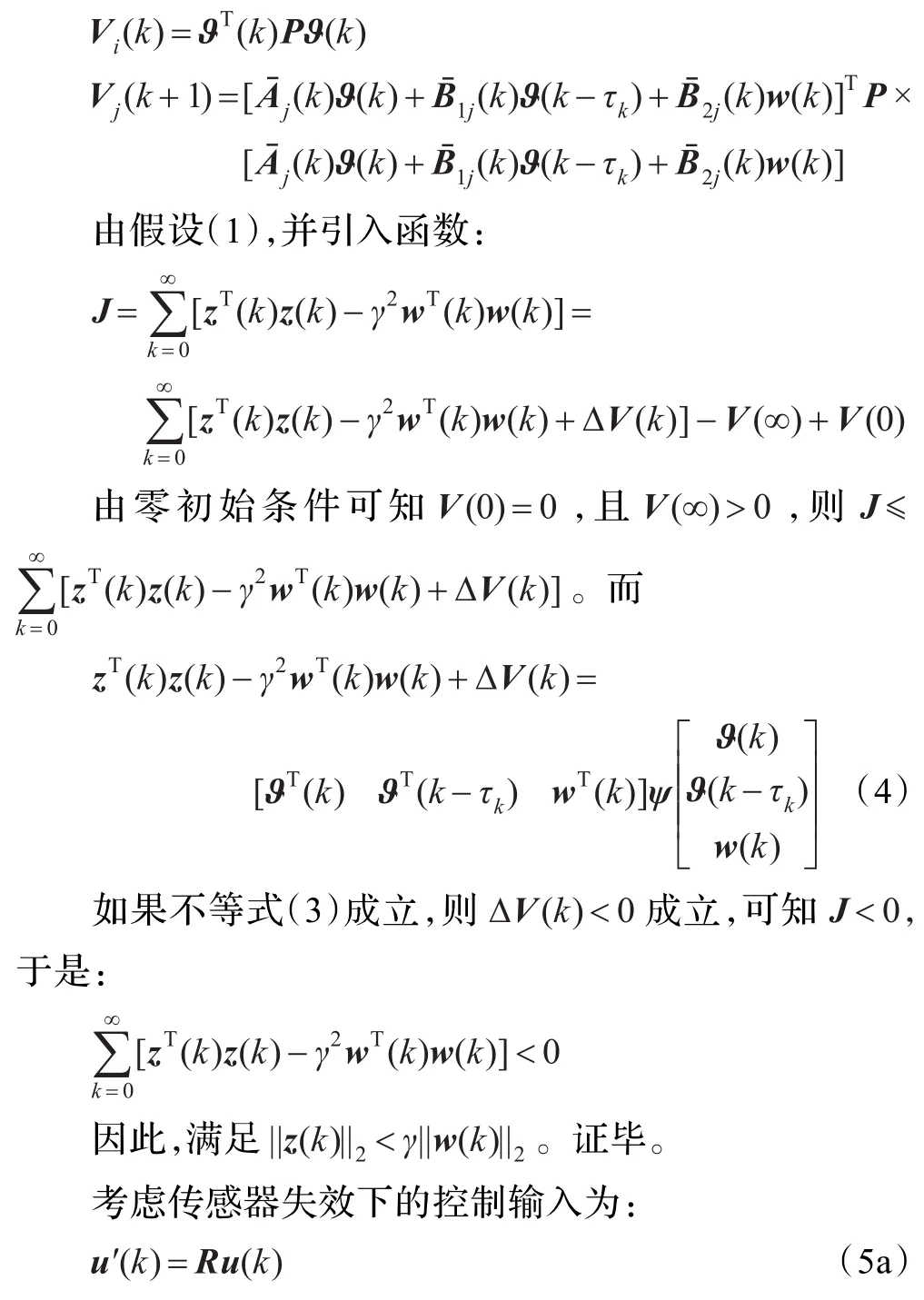
定理1对于随机切换模型式(2),给定常数γ>0,如果存在适维矩阵 P>0,使得以下矩阵不等式(3)成立,则网络控制系统式(1)在模态依赖下是渐近稳定的,且具有H∞性能指标γ。不等式(3)中*表示矩阵对称位置的转置。

证明 对于随机切换模态式(2),假设k时刻从传感器到执行器数据丢包i个,k+1时刻从传感器到执行器的整个通道数据丢包 j个,构造Lyapunov函数:
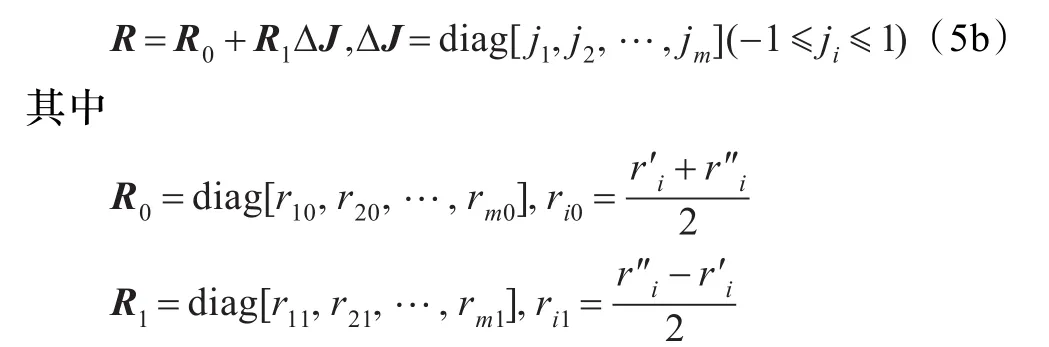
其中R为传感器失效的系数矩阵,R=diag[r1,r2,…,rm],0≤r′i≤ri≤r″i,r′i≤1,i=1,2,…,m ,式 中 r′i,r″i(i=1,2,…,m)为所给定的常数,第i个传感器完全失效时ri= 0,完全正常则ri=1。因此矩阵R表示为:
推论1对于传感器失效和具有控制率u(k)=Kx(k)的随机切换模型式(2),给定常数γ>0,ε>0,如果存在适维矩阵P>0,使得矩阵不等式(6)成立,则闭环网络控制系统式(1)在模态依赖下渐近稳定,且具有H∞性能指标γ。不等式(6)中*表示矩阵对称位置的转置。

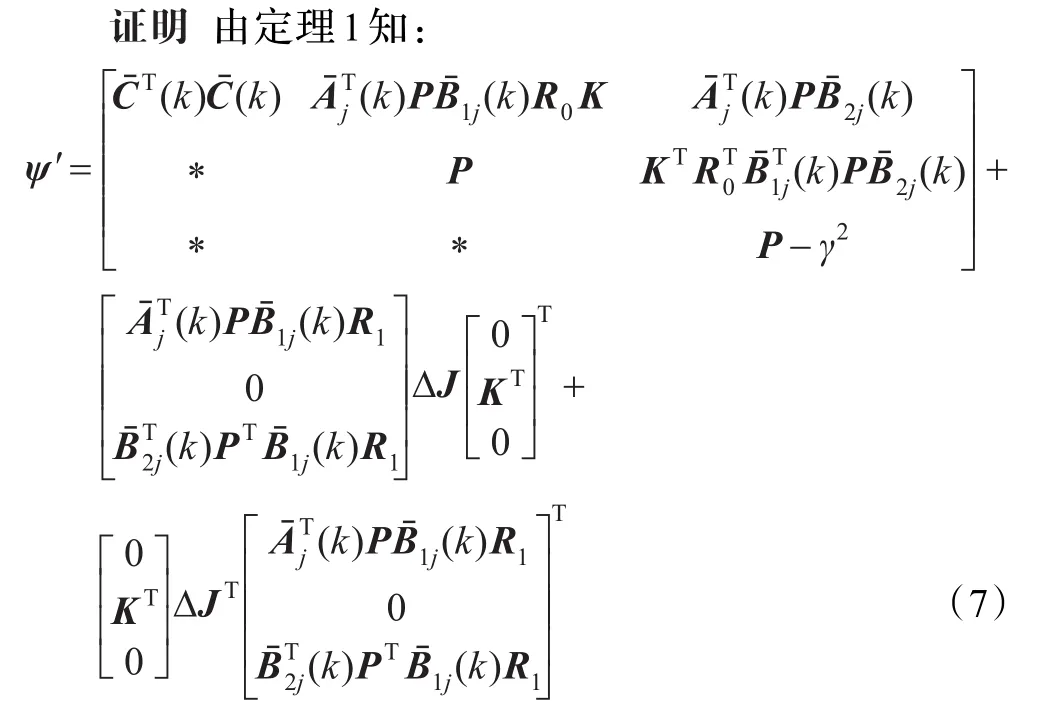
运用引理1和schur补定理可得出推论1。
4 仿真算例
假设随机切换模型式(2)的初始状态为x=[0.8 0.45 0.6 0.6 0.5]T,并具有如下参数:

假设随机切换模型式(2)的初始状态x=[0.28,0.3,0.24,0.24],外部干扰w(k)=的闭环网络控制系统状态x1、x2、x3、x4的零输入响应曲线如图2,方波响应如图3。
从4个小图仿真可以看出系统在有外部干扰的情况下零输入状态 x1,x2,x3,x4经过10~18 s都能趋于渐近稳定。由此证明了本文所给结论的正确性。

图2 状态x的零输入响应
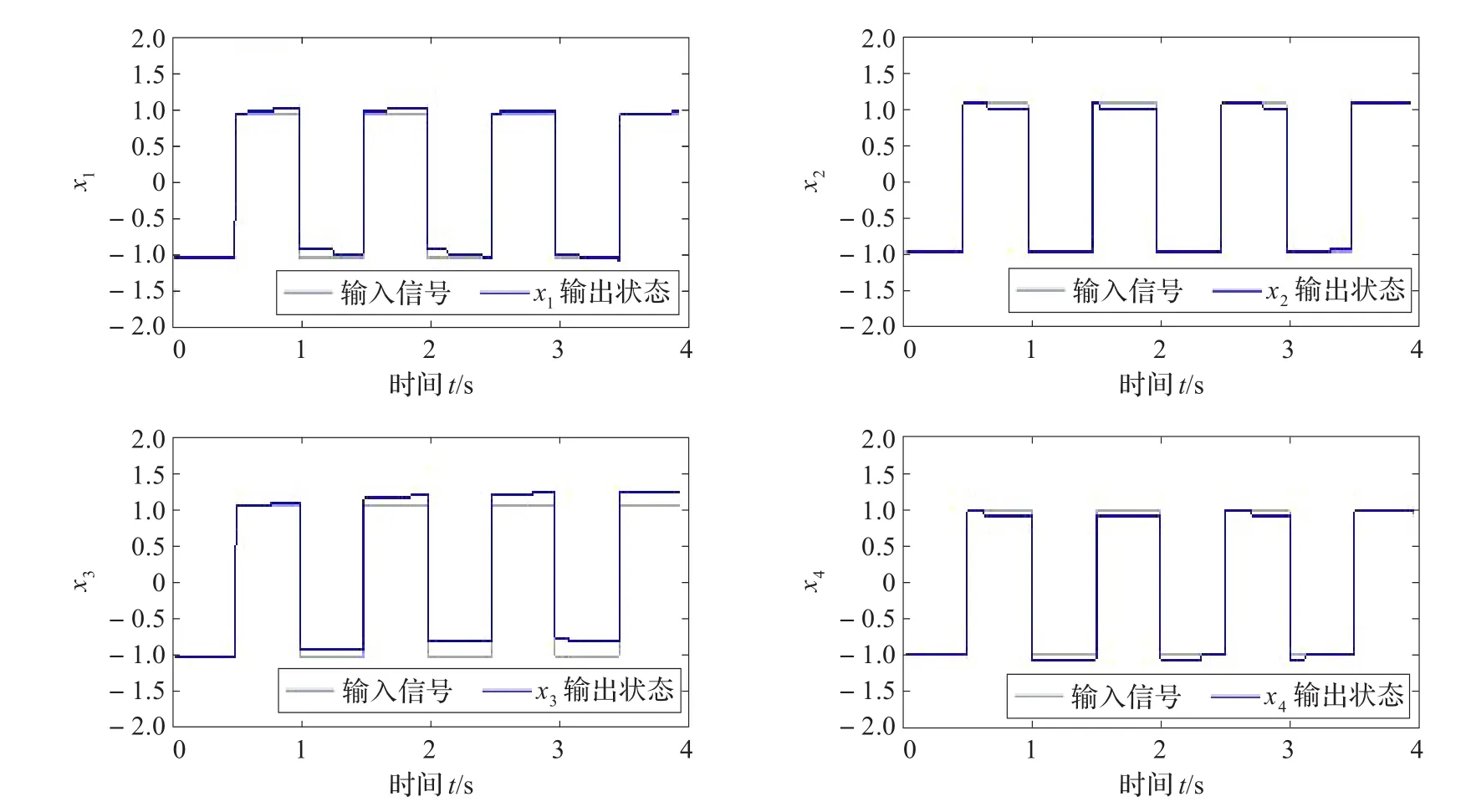
图3 状态x方波输出响应
图3中方波周期为1 s,持续时间为4 s。图中灰色方波为输入信号,蓝色曲线为x1,x2,x3,x4的输出状态。可以看出本文中采用鲁棒容错方法对于多故障网络控制系统具有较强的鲁棒性,具有较快的响应速度、较好的跟踪性能和输出效果等特点。
5 结束语
本文首先研究了具有数据随机丢包的时延网络控制系统鲁棒H∞容错控制,给出了网络控制系统模态依赖下渐近稳定且具有H∞性能指标的条件。然后建立了节点失效模型,通过设计控制器,改善了闭环网络控制系统的性能。最后通过仿真实验验证了方法的正确性。
[1]Zhang Wei,Branicky M S,Phillips S M.Stability of networked control systems[J].IEEE Control Systems Magazine,2001,21(1):84-99.
[2]Zhang Wen’an,Yu Li.Output feedback stabilization of networked control systems with packet dropouts[J].IEEE Trans on Automatic Control,2007,52(9):1705-1710.
[3]Guo Chenyu,Zhang Weidong,Bao Jie.Robust output feedback H∞ control for networked control systems based on the occurrence probabilities of time delays[J].International Journal of Systems Science,2012,43(2):259-271.
[4]彭高丰,李学全,马振中,等.节点部分失效的网络控制系统鲁棒H∞容错控制[J].计算机工程与应用,2012,48(31):205-209.
[5]Chen Peng,Cheng Yangtai.Communication-delay-distribution-dependent networked control for a class of T-S fuzzy systems[J].IEEE Transactions on Fuzzy Systems,2010,18(2):326-335.
[6]Che Weiwei,Wang Jianliang,Yang Guanghong.H∞ control for networked control systems with limited communication[J].European Journal of Control,2012,18(2):103-118.
[7]Xu Hao,Jagannathan S,Lewis F L.Stochastic optimal control of unknown linear networked control system in the presence of random delays and packet losses[J].Automatica,2012,48(6):1017-1030.
[8]Donkers M C F,Hemels W P M H,Bernardini D,et al. Stability analysis of stochastic networked control systems[J]. Automatica,2012,48(5):917-925.
[9]Bamieh,Bassarn A,Jovanović M R,et al.Coherence in large-scale neworks:dimension-dependent limitations of local feeback[J].IEEE Transactions on Automatic Cotrol,2012,57(9):2235-2249.
[10]李炜,曹慧超.区间快变时延NCS鲁棒保性能容错控制[J].华中科技大学学报:自然科学版,2011,39(3):105-110.
[11]陈青,吴敏.具有网络丢包和时延的网络化控制系统设计[J].控制与决策,2011,26(2):293-296.
[12]Yu K W,Lien C H.Robust H∞ control for uncertain T-S fuzzy systems with state and input delays[J].Chaos Solitons Fractals,2008,36:920-927.
[13]Yang Fang,Fang Huajing.Control structure design of networked control systems based on maximum allowable delay bounds[J].Journal of the Franklin Institute,2009,346(6):626-635.
[14]Boyd S P,Ghaoui L E,Feron E,et al.Linear matrix inequalities in system and control theory[M].Philadelphia:SIAM,1994.
[15]彭高丰,马振中,夏明霞,等.传感器部分失效的网络控制系统H∞容错控制[J].电光与控制,2012(11):58-61.
PENG Gaofeng
Department of Electronics and Information Engineering,Changsha Normal University,Changsha 410100,China
For a class networked control systems against sensor failure,random packet dropout and time-delay,conversion mode is established.Based on constructing a suitable Lyapunov function and Linear Matrix Inequality(LMI)techniques, the sufficient conditions for the stability of systems asymptotically in modal dependence are researched.The sensor failure model is designed and the design method of controller is put forward.Through using robustH∞fault-tolerant control method, the performance of the closed-loop networked control systems is improved.The simulation results show the effectiveness and the feasibility of proposed approach.
networked control systems;multi-fault;mode-dependent;robustH∞fault-tolerant control
针对存在传感器失效、随机丢包和时延等多故障的网络控制系统,建立了系统的转换模态。通过运用Lyapunov和LMI判定方法,研究了系统在模态依赖下渐近稳定的充分条件。设计了传感器失效的模型,提出了控制器的设计方法,运用鲁棒H∞控制方法,改善了闭环网络控制系统的性能。通过仿真实例验证了该方法的可行性和有效性。
网络控制系统;多故障;模态依赖;鲁棒H∞容错控制
A
TP273
10.3778/j.issn.1002-8331.1303-0023
PENG Gaofeng.H∞control for networked control systems with multi-fault and mode-dependent.Computer Engineering and Applications,2014,50(24):54-57.
湖南省自然科学基金(No.11JJ3080)。
彭高丰(1977—),男,副教授,主要研究方向为鲁棒控制、网络控制系统。E-mail:pgf0731@163.com
2013-03-04
2013-06-03
1002-8331(2014)24-0054-04
