基于神经网络的PMSM转子速度估算法
2014-08-01陈庆协吴春富陈晶晶范宜标
陈庆协,吴春富,陈晶晶,范宜标
(龙岩学院 物理与机电工程学院,福建 龙岩 364012)
基于神经网络的PMSM转子速度估算法
陈庆协,吴春富,陈晶晶,范宜标
(龙岩学院 物理与机电工程学院,福建 龙岩 364012)
为了提高PMSM(永磁同步电机)控制性能和速度的观测精度,建立了PMSM在旋转坐标系下的数学模型,提出了基于神经网络的PMSM转子速度的估算法.仿真实验结果表明:系统能够稳定运行,在PMSM启动时可以提高速度观测精度,验证了所提出的基于神经网络的PMSM转子速度估算法的优越性.
神经网络;PMSM;转子速度;估算法
PMSM(永磁同步电机)的控制最为简便的是应用定子磁链估算其转子角度及转速,但其条件是PMSM处于稳态.在PMSM启动时,因PMSM的定子磁链的转速与其转子转速不等,需要进行处理.本文提出了基于神经网络的PMSM转子速度估算,并进行仿真实验.仿真实验结果表明:在PMSM启动时可以提高速度观测精度.
1 建立PMSM的数学模型
如图1为PMSM的定子、转子参考坐标系,d轴与A相绕组间的夹角为θ,转矩角定义为δ.在转子d—q坐标系下PMSM的磁链、电压、转矩的表达式为[8]:
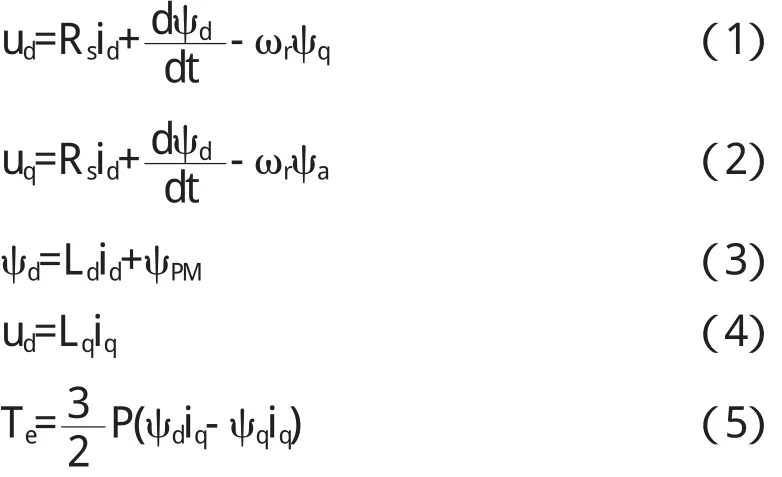

图1 PMSM的定子、转子参考坐标
上式中:ψq、ψd、iq、id、uq、ud、Lq、Ld分别是定子绕组折算到q、d轴的磁链、电流、电压和电感;ψs、us、Rs为定子定子端磁链、端压及定子绕组电阻;ψPM为转子磁钢在定子侧的耦合磁链;Te、P、ωr为电机电磁转矩、极对数和角频率.
2 利用定子磁链矢量角速度估算法
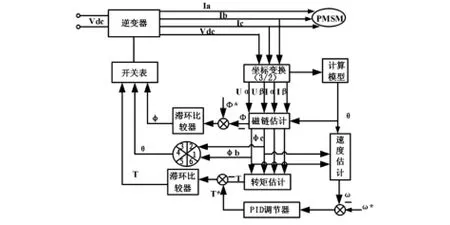
磁链的直接转矩控制系统中的矢量框图如图2所示.
在实际系统中,当PMSM稳定运行时,其转子转速的估算可由定子磁链矢量角估算的离散化来完成.转子的旋转速度与定予磁链的速度相等,即ωr=ωs,在两相静止α-β坐标系下可以计算θs和ωr:


3 定子磁链矢量角速度估算法仿真实验
可以将ωr和θr表示如下:
为了说明基于定子磁链矢量角速度估算策略在PMSM启动时有较大的误差,做了基于定子磁链矢量角速度估计的仿真.当样机给定转速为120r/s,带恒定负载的仿真结果如图3、图4所示.仿真结果可以发现,当样机稳定运行时,基于定子磁链矢量角速度估算策略可以较准确的估计PMSM的速度;在起动时却有较大的误差,且观测速度滞后于实际运行速度.

图3 转子利用定子磁链估算的转速(给定转速l2Orad/s)
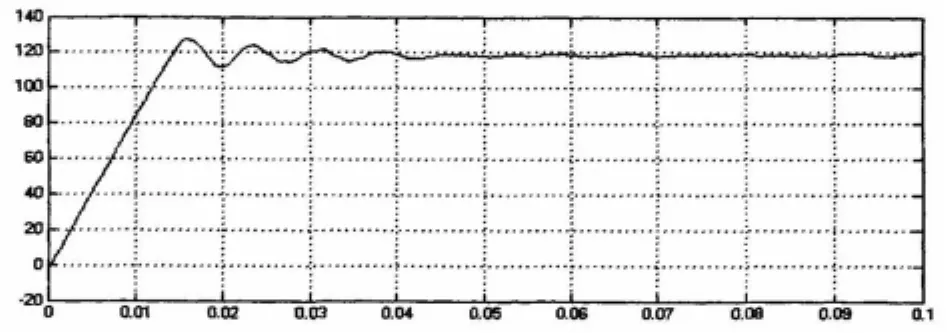
图4 转子的实际转速(给定转速l2Orad/s)
4 基于神经网络的PMSM转子速度的估算法
4.1 神经网络及其网络形态和训练算法
令Wij(q)(i=1,2,…nq;j=l,2,…nq)则网络的输入、输出关系为:

设首先设定拟合误差的代价函数为:

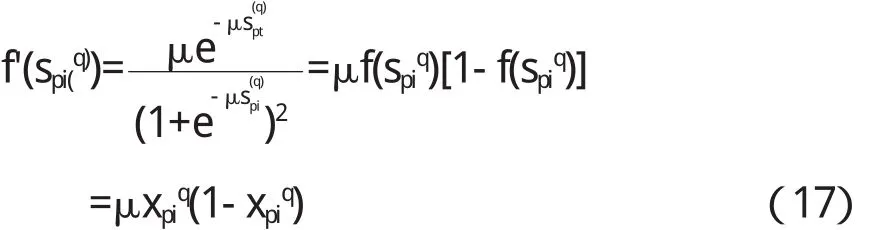
网络训练的目是调整连接权系数,使代价函数E最小.利用一阶梯度法,对于第Q层有:

其中:

这里的xpi(Q),spi(Q)和xpf(Q-1)表示利用第P组输入样本所计算的结果.
对于第Q-1层有:

设f为s的函数,
则

最后可归纳出神经网络的学习算法如下:

4.2 神经网络速度观测器构成
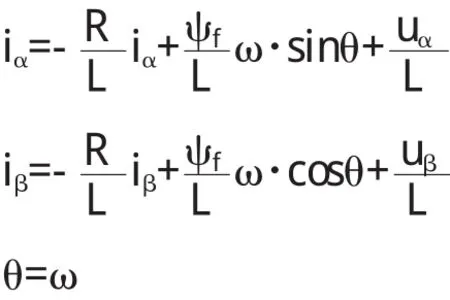
PMSM的电压、电流方程如下:

从三相定子坐标系到αβ坐标系变化:

PMSM在αβ坐标系上的动态模型可表示为:

将上式离散化后
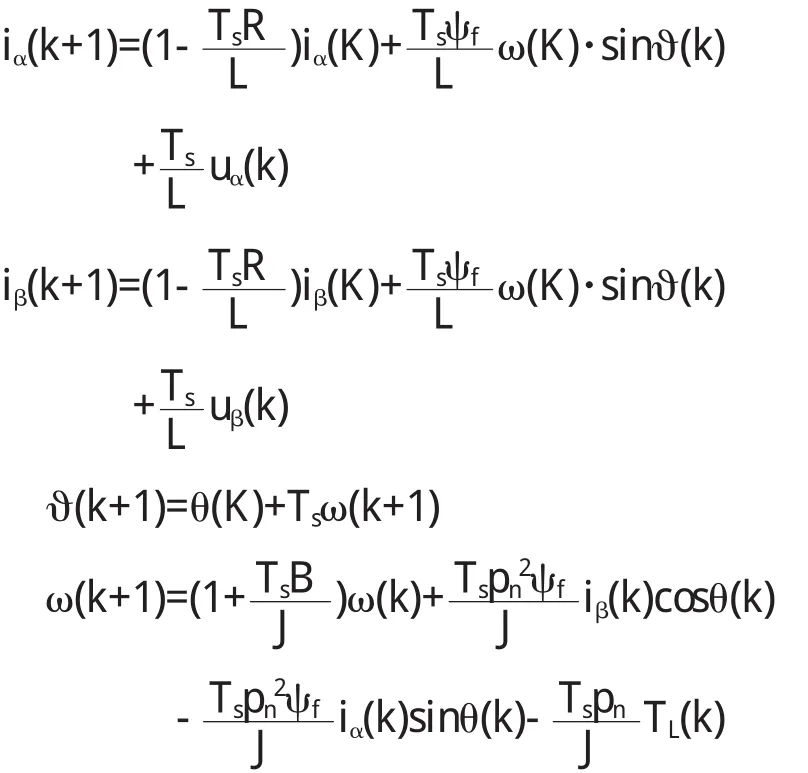
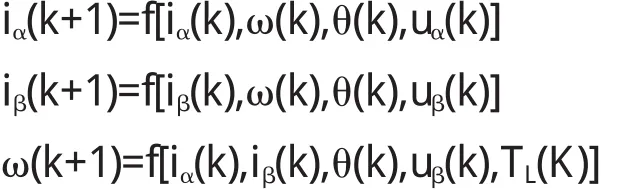
上式中ω为转子角速度;B为旋转摩擦系数;J为转动惯量系数.将上述各式可简化为:永磁同步电机是一个强耦合、非线性的电磁及机械的结合体.由上述可知,永磁同步电机的即时速度仅与电流的前一刻速度及所带负载有关,可以搭建如下图5.

图5 PMSM转子速度观测器的直接转矩控制系统
5 神经网络速度观测器仿真
为了说明基于神经网络速度估算法在PMSM启动时可以提高速度观测精度,做了基于定子磁链矢量角速度估计的仿真实验.当样机当样机给定转速为120r/s,带恒定负载时的仿真结果如图6、图7所示.仿真结果可以看出,当样机起动与稳定运行时,基于神经网络速度估算法都可以较准确地进行速度估计,具有良好的精度,验证了所提出的基于神经网络的PMSM转子速度估算法优越性.
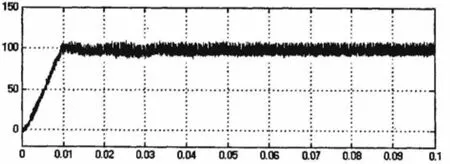
图6 神经网络观测的转子转速(给定转速l00rad/s)

图7 实际转子转速(给定转速lOOrad/s)
6 结束语
随着PMSM(永磁同步电机)运行状况的变化,PMSM定子电阻、电感和PMSM转子(永磁体)磁链也会发生变化,导致增大PMSM速度观测精度误差,降压PMSM控制性能.因此,直接转矩控制系统中无速度传感器技术的研究具有现实意义.而今,随着网络形态的发展、训练算法的完善,动态网络将为提高PMSM直接转矩控制系统的速度观测精度提供有力的支持.
〔1〕余浩赞,王辉,黄守道.永磁同步电机无速度传感器控制系统研究[J].电力电子技术,2008.
〔2〕王坚,桂卫华,刘可安.无速度传感器异步电机直接转矩控制系统的研究 [J].机车电传动,2005 (02).
〔3〕汤蕴翎,张奕黄,范瑜,等.交流电机动态分析[M].北京 机械工业出版,2005.
〔4〕陈伯时.电力拖动自动控制系统[M].北京:机械工业出版社,2003.
〔5〕BoseB-K.MotionConlzolTechnology-№t andFuture[J].IEEETransitionsOilIndustryApplication,1985,V01.21.
TP183
A
1673-260X(2014)11-0016-03
