无人飞艇平台航测1∶500成图生产工艺研究
2014-08-01何军利
何军利
(山西省基础地理信息院,太原 030001)
1 引 言
利用无人飞艇搭载小型相机来获取航空影像,进而成摄影测量生产项目。由于该方法受空域申请限制较小、航摄成本低、飞行设计灵活,目前已经越来越多地被应用在小范围的测绘任务中,如乡镇、中小县城、县级市的1∶500、1∶1000、1∶2000航测任务上。然而由于无人飞艇体积较大,飞行中易受到气流影响,如果无人飞艇没有携带相机稳定平台,经常造成航摄影像的三个角元素(倾斜角、横滚角、俯仰角)值很大;加上如果携带的都是简单的非量测相机,相机分辨率有限,获取影像的基高比很小(一般在0.1左右)。所以最初简单的无人飞艇获取的航空影像主要用于正射影像的制作,个别情况也用于1∶2000的航测项目上,但最终成果精度都不能满足规范要求。需要进行大量的外业控制测量工作后,平面精度基本满足,但高程精度仍不能满足规范要求。因此普通简单无人飞艇航摄数据很难被航测项目所利用。
近年来,为满足航测成图精度,测绘科技人员对无人飞艇航空摄影测量工序进行了不断的技术革新。技术改进是:①开始搭载轻型组合相机,组合相机的影像地面分辨率在不断提高,同时由于影像幅面增大,使航摄的基高比(摄影时相邻投影中心之间的距离和相对航高的比)也大大增加;②无人飞艇引入了轻型相机姿态稳定平台和定位测姿系统,使得获取的影像不但更加清晰,同时摄影的空间定位更准确、空间姿态角度也更加准确;③探索新的外业像片控制测量方案;④摄影测量软件功能也在不断的升级,开始全面支持针对非量测相机的空三加密工作。综合上述因素,针对无人飞艇的航空摄影、外业控制测量、内业空三加密等技术进行充分的整合,形成完备生产技术流程,使得利用无人飞艇平台获取的影像能够满足1∶500大比例尺摄影测量任务的精度要求。最终也解决了很多大型相机在进行1∶500大比例尺航测成图时,高程需要全野外实测的技术难题。
2 无人飞艇平台和航空摄影
2.1 飞行平台的选取
利用无人飞艇搭载组合四拼相机进行航空摄影,四台相机绕一假定主轴按一定方位角对称布设,摄影时四台相机同步曝光,相片之间影像部分相互重叠,形成一个唯一的虚拟投影中心。摄影结束后经过相机组合二次计算成像、误差自动检校来获取大幅面影像(如图将A、B、C、D 4个影像拼接成为一张航片)。四相机被安置在特定的轻型稳定平台上,稳定平台配备有测姿陀螺仪、角速度计等设备,可以使摄影时的姿态角度尽量小。飞艇平台携带高精度双频GPS接收机,地面辅助布设有GPS固定站,能够获取更为准确的摄影飞行轨迹参数。

图1 四拼相机拼接示意图
2.2 航摄方案设计的主要技术要求
①飞行相对航高设计:200m~300m,飞行相对高度设计主要是参考相机的焦距和获取影像的地面分辨率。
②航线设计:航线设计一般设计为东西航线或南北航线。航线设计要考虑当地目前风向、地面建筑物的分布情况、地面的海拔高度。航线最好设计为与风向一致、与街道平行、同一航线的飞行高度尽量一致,这些都有利于后期的数据处理。
③航向重叠度:由于我院无人飞艇平台的载油量都有限,空中航摄停留时间在2小时左右,平台携带存储设备空间充足,因此设计的曝光时间间隔都小一些,一般航向重叠度设计在85%左右,相机曝光间隔大于2s即可。如果充分考虑到基高比时,可以将航线内曝光实地距离控制在航高的1/4(60m),这样抽片后的基高比正好在0.5左右,有利于提高高程精度。
④旁向重叠度:低空平台航摄时由于受侧风的影响比较明显,旁向重叠度设计一般应在40%~55%左右,这样才能确保航线之间达到无缝连接。在涉及有高大建筑多或密集居民区时,可适当增加航线之间的重叠度;而空旷区域在无人飞艇飞行姿态稳定时则可以适当减小旁向重叠度。
2.3 敷设构架航线提高航测项目的整体精度
改进航摄航线设计是提高成图精度的重要方法之一。对于稳定的大飞机航摄平台,一般不必敷设构架航线,如进行构架航线的布设也是以减少外业控制点的布设数量为目的。但对于不稳定的无人飞艇平台来说,敷设构架航线则是非常有必要的,其可以进一步提高无人飞艇平台的成图精度。敷设构架航线可以提高航摄区域网的稳定性,在航线的首末和中间敷设垂直方向的构架航线,其可以大大提高航摄区域两侧和边角区域的精度,同时增强区域网的稳定性、减小外业控制点的数量、提高内业空三加密的稳定性和可靠性。
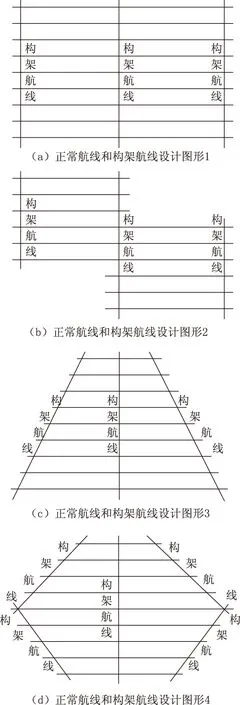
图2 常见的几种航摄区域敷设构架航线的设计图形
2.4 航线设计要考虑飞艇飞行姿态的控制
首先无人飞艇在转弯进入下一个航线时,经常会出现飞行高度大幅下降或偏离设计航线的情况。主要原因是无人飞艇本身体积较大,动力有限,转弯后飞回到设计航线慢。在考虑航线设计时要在航线两端向外多飞200m左右;其次是起始航线的设计也要覆盖到实际测区以外。
3 像片控制测量技术方案的特点
3.1 突破航空摄影测量规范要求
根据大比例尺航测规范要求:1∶500、1∶1000平地、丘陵地航测法成图时,要求像片外业控制测量必须进行全野外。如果执行现行规范要求,无人飞艇平台的像片控制测量工作量将会非常大,那么无人机和无人飞艇等低空摄影平台将无法用于生产。同时大比例尺航测规范不允许进行内业空三加密,这些限制了无人飞艇平台应用范围。然而大比例尺的航测规范基本上是上世纪90年代参照模拟法航空摄影测量的仪器设备情况制订的。随着数字摄影测量技术的不断发展,目前实际生产中大比例尺航测项目区域网布点、空三加密已经开始普遍使用。低空影像地面分辨率在不断提高、相机的基高比在不断增大,另外数字摄影测量软件技术也在不断进步。摄影测量软件可以有效解决很多模拟摄影测量软件无法解决的问题,如模拟的测图要求三个角元素ω、φ、к(к角是相对较差值)小于4°。而数字摄影测量空三软件可以在三个角元素ω、φ、к小于10°的情况下都能很好地解决相对定向问题。因此随着航摄相机、测量软件技术的不断进步,在保证成果精度符合规范要求的前提条件下,技术创新和改进是技术设计所允许的。这符合测量规范中关于允许采用“规范未列入的新技术和新方法[1]”的规定,因此在保证大比例尺测图平面和高程精度的前提下,可以采取外业区域网布点、内业空三加密的方案来确保精度。但是需要引起注意的是,不是什么样的低空航摄资料都可以进行立体测图,不是能够通过空三加密的数据都可以达到很好的测图精度。航摄影像飞行姿态好坏直接影响成图的精度,一般好的低空平台航摄数据,角元素ω、φ尽量控制在0~8°[2],大于10°的基本上要剔除掉,同时测区内应尽量多布设像片控制点和检查点进行约束空三加密。
3.2 像片控制测量工作底图
首先不能使用单张航摄影像直接用于外业选点使用,也不能简单地使用拼接后的影像按距离直接布点。目前可以采取的技术措施是先制作粗略的正射影像作为像片控制测量底图,但是底图上控制点位置要由内业空三加密组进行概略选取,外业在实际选点中只做微小移动。内业概略选点的依据是:空三加密区域网的强弱、航摄航线敷设情况、航摄影像实际姿态情况,综合考虑上述因素后控制点基本上都分布在区域网薄弱地方和航线连接处。控制点在明显目标上选点,选点同时要充分考虑外业测量的困难程度(如尽量避免在高速公路、居民区的独立院落内选点等),但最后所有的控制点都尽量选取在航线重叠处,避免选在单航线上,如航线连接区域没有好的选点目标则要分别布点。
3.3 控制点布设方案
由于目前没有规范规定低空平台的外业控制点布设要求,因此像片控制测量仍然采取尽量多的控制点布设方案,增加多余控制点和检查点数量,来检测区域网的稳定性。我院在控制点布设的总体设计是:四周及边沿不稳定区域密集布点;中间区域均匀布点;所有像片控制点必须布设在航线连接处。
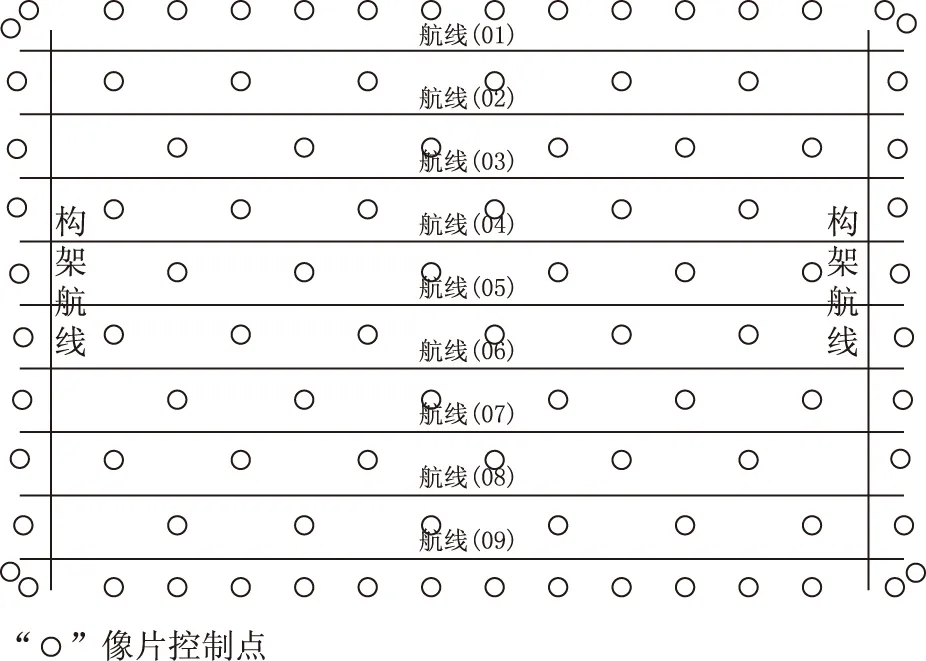
图3 一个区域的控制点布设方案(所有控制点均为平高点)
为充分满足1∶500航测成图的精度,在控制点布设上有以下几个特点:①四边的控制点密度很大,一般设计在300m左右;②相邻航线要确保有连接控制点,中间航线点位间隔控制在500m左右;③在区域的四角要布设多余的控制点。基本上是首末航线间隔6基线布点,中间航线间隔10线布点(不抽片时基线长55m),这样布设下来区域的控制点测量难度也并不大。我院在山西万荣县1∶500基础测绘项目中,采用无人飞艇搭载四拼相机,获取县城24km2的区域的航空影像,外业控制点和检查点共计布设368个,外业工作量一周左右,与传统大比例尺航测全野外像片控制测量工作量基本上是可以减小的。在经过几个测区的空三加密和立体测图检验后发现,实际这样的控制点数量可以减少一部分,但布点的原则仍然不变,即周边密集、中间均匀控制。
3.4 控制点的布标摄影
由于利用无人飞艇平台获取的航空影像进行像片控制测量时需要布设大量的外业控制点,在有些较难选取控制点的区域,就需要进行布标摄影。在航线设计完成后,将设计航线转标到已有的正射影像图上,确定需要进行布设标志的区域,按照航线的设计参考布点要求布设一定数量的标志点。这样可以有效地解决控制点选点困难和精度低的问题[3]。但实际生产中布标摄影也基本上很少使用,首先是效率不高,其次时间上不够灵活,最后关键是需要进行大比例尺航测任务的区域一般都有很好的选点目标。对于外业控制点很难选取的地方,由于目前影像的分辨率达到3cm~5cm左右,外业如果携带笔记本电脑协助放大影像进行选点,很多小目标都可以作为选点目标,如很小的一块草地边角、30cm~50cm的石块角等。
4 空三加密技术要求
4.1 空三加密软件的选取
软件平台我院采用Inpho数字摄影测量软件的MATCH-AT模块,软件要求提供像片的外方位元素、相机参数、相对航高等参数[4]。
4.2 全区域相对定向结果分析
相对定向点的提取采取全自动的方法进行,匹配策略:level 5 FBM、level 4 FBM、level 1 FBM三级特征匹配;level 3 LSM、level 0 LSM两级最小二乘法匹配。最小二乘法匹配应用核线影像搜索,同时匹配策略可以使用影像的初始外方位元素,也可以使用测区的DTM的地形信息作为影像匹配参考。数字摄影测量空三加密中相对定向的作用非常关键,一个稳定、可靠的相对定向结果应具备以下条件:①整体精度高,即相对定向中误差小,没有残差很大的相对定向点;②每张航片都均匀分布有一定数量的相对定向点;③每张航片必须和相邻航线有公共的相对定向连接点,这一点是非常重要的,空三加密必须对相对定向进行认真检查。如果仅仅参考相对定向中误差和点的数量,则很可能会出现航线之间的模型连接不上,最终严重影响平差解算的精度。
4.3 空三加密平差解算权的选取
空三加密平差解算权的选取是加密的核心内容之一,也是比较困难的,一般没有特别的规定,但是控制点平差权的选取却又是极其重要的,平差权设置过大会夸大误差,加密挑粗差的难度增加,平差权设置过小则会隐藏误差,控制点残差又不真实。同时不同的加密软件对平差权的设置也不一样,但是所有加密平差权的设置原则是先大后小,逐级检查。当控制点残差随平差权的改变变化不明显时,则加密精度趋于稳定,并且可靠。平差权的大小是否准确合理,评定的唯一标准就是将加密结果导入到第三方软件下进行立体检测,当模型上读取的残差和加密残差大小一致时,说明平差权的设置准确合理。一般在进行1∶500空三加密时设置的权为0.05左右,进行1∶1000的空三加密时权设为0.1左右。
4.4 空三加密平差时相机自检校的设置
无人飞艇或小飞机的空三加密由于相机都是非量测相机,空三加密模块下必须选取相机自检校模型,如在Inpho加密软件下要设置Compute self-calibradion parameters参数,目的是消除加密区由相机产生的系统误差。经过多个加密区域的生产验证,发现空三加密平差时设置相机自检校参数能够有效减小控制点的残差,尤其是高程的残差;同时经过后期立体模型的量测验证,控制点的残差更真实、更准确。
4.5 空三加密的精度检查
4.5.1 相对定向精度的检查
相对定向的精度直接关系到空三加密的稳定性、合理性。由于目前空三加密基本上都是自动提取连接点,实际部分影像同名点很难自动提取,如大面积荒漠区、林区、植被覆盖密集区,这些区域需要对相对定向结果进行认真的检查和分析,人工补刺一些相对定向点,以确保航线之间连接紧密,每个像片都有足够的航线内部和航线间的相对定向点。最后相对定向中误差一般要小于2.4μm,最大像点残差不超过20μm。
4.5.2 控制点的转刺及修改
像片控制点的转刺是一个需要长期经验积累,也是空三加密的技术难点之一。一般一个技术合格的加密技术人员应具备以下条件:①熟悉外业像片控制测量人员的作业习惯;②要有丰富影像判读能力;③要有良好的作业习惯。空三加密需要科学的流程,精准的分析和判断力。一般加密转刺控制点的方法是:先转目标明确且精度高的关键位置的点,再转目标不好的和位置普通的点。要求每转刺一个控制点都要有很高的精度,需要放大到像素级进行,同时应辅助立体模型,尽量把上下、左右视差控制到最小。
4.5.3 平差结果的分析
在空三精度合格平差结束,将区域内部任何一个量测控制点剔除后,该点内业量测得到的结果和外业成果应该是一致或接近的。高精度的、稳定的加密结果反映在加密软件上时,出现的结果是内部所有控制点坐标反算到像方坐标位置基本准确(即预测位置准确),这时说明空三加密基本趋于稳定、可靠。空三精度检查可以在测图工序或DTM编辑时导入控制点和检查点进行立体量测检查。空三加密平差结果一般控制在规范要求中误差的1/3,最大残差可以接近中误差值,如1∶500平地空三加密基本上平面和高程中误差小于0.08m,控制点最大残差小于0.25m。
5 数字正射影像图制作的技术特点
无人飞艇平台正射影像的制作难度很高,首先是DEM数据的立体编辑工作量明显增加,主要原因是立体模型的数量增大;飞行过程中多余的影像比较多,飞艇航摄设计由于相对航高很低,像片的航向重叠度必须很大,这样就造成影像制作过程立体模型数量大幅增加。要求DEM编辑需要全区域整体编辑,同时要求立体模型能够自动切换。
无人飞艇平台正射影像制作的困难之二是像对拼接线编辑工作量也很大,同样是因为多余影像比较多造成的。拼接线的编辑要求必须软件能够实时在线显示编辑结果,拼接线改变后影像拼接结果能够实时显示,这样拼接线的编辑就不会返工。
无人飞艇平台正射影像制作的最大困难是如何综合解决影像投影差大造成的大量影像相互压盖问题。由于无人飞艇的飞行高度在200m~300m之间,一些20m~100m的高层建筑的投影差就非常大,如果要获取可视效果好、影像压盖合理正射影像,则需要编辑的工作量很大,这就要求拼接软件具备正射影像局部修补功能,如果转到第三方软件下再处理则会相当麻烦。
6 无人飞艇存在的问题及改进技术措施
6.1 无人飞艇的飞行效率需大幅提高
目前无人飞艇的推进系统功率、飞艇的载重能力、续航能力、抗风力都很有限,技术装备需要不断改进,这样无人飞艇平台进行大比例尺成图才能有更大、更广泛的应用。
6.2 提高DOM生产精度的技术措施
由于无人飞艇的飞行高度很低,通常只有200m~300m左右,造成偏离影像中心的地物投影差很大,在生产正射影像时经常出现房屋的相互压盖,高大建筑物压盖道路的情况,这样的正射影像使用起来很不方便,很难用作外业调绘的工作底图。为提高正射影像精度,减小高大建筑物的压盖问题,则采取不抽片进行空三加密,影像纠正采取片片纠正,尽量使用投影中心的影像参与拼接。
6.3 确保数字地形图生产平面精度的技术措施
无人飞艇获取的影像在远离投影中心的时候变形较大,平面精度会差一些,这样一般采取隔片建立立体像对,每个立体像对都不在边沿进行立体采集(可在立体测图中设置余20%重叠区域就换像对)。这样测图始终使用像片中心区域,就能更好地确保立体测图的平面精度。
6.4 确保数字地形图高程精度的技术措施
在建立立体像对进行测图时,无人飞艇的像对重叠度很大(一般不抽片有85%),这样产生的结果是测图模型的基高比不大,一般只有0.25左右。基于这种情况本文采取抽片建立立体像对进行各类要素的提取,但实际生产中也发现抽片后一些超高层建筑物立体下不完整,出现漏洞,这样还是要添加不抽片的模型进行量测。为了保证测区的高程精度能够符合规范要求,建议还是航摄时控制好影像的曝光间距,可将影像曝光的实地间距控制在相对航高1/4左右(曝光间距55m),则抽片后的模型基高比就可以达到0.5左右,有利于测图高程精度的提高。
7 结束语
我院在2013年5月~10月,利用无人飞艇平台完成了山西省运城市10个县约350km2的航空摄影,目前已经完成各县像片控制测量、内业空三加密,累计处理无人飞艇影像3万余张。其中外业像片控制测量均采用区域网法布点,空三加密控制点的平面中误差能够控制在0.07m,高程中误差能够控制在0.08m;外业检查平面高程中误差均达到规范要求,且高程精度优于平面精度。成果数据已经通过省级质检部门的验收,精度完全满足规范要求。
参考文献:
[1] 中华人民共和国国家质量监督检验检疫总局.GB/T 7930-2008 1∶500、1∶1000、1∶2000地形图航空摄影测量内业规范[S].北京:中国标准出版社,2008.
[2] 国家测绘局.CH/Z 3005-2010 低空数字航空摄影规范[S].北京:测绘出版社,2010.
[3] 国家测绘局.CH/Z 3004-2010 低空数字航空摄影测量外业规范[S].北京:测绘出版社,2010.
[4] 国家测绘局.CH/Z 3003-2010 低空数字航空摄影测量内业规范[S].北京:测绘出版社,2010.