基于ARGO浮标数据的全球海水声速场研究
2014-08-01蔡艳辉程鹏飞文汉江杨希希张金铎
蔡艳辉,程鹏飞,文汉江,杨希希,张金铎
(1.中国测绘科学研究院,北京 100830;2.国家测绘工程技术研究中心,北京 100039)
1 引 言
目前,水下目标的定位、导航最有效的手段还是声音信号。与通常的无线电测距的方式一样,通过测量声音信号往返或者单程的传播时间,在声音传播速度已知的条件下,就可以直接计算出两个目标的距离[1-2]。通常,海水声速当作一个已知量,但是,声音在介质中的传播速度与介质的特性有关,因此,海水介质的变化都将影响声速的大小。如何准确地确定海水声速的大小是进行水下精密测量的关键问题[3],同时,海水声速变化会导致声线的弯曲,如果不能准确地确定海水声速的梯度,就不可能准确地确定声线的弯曲,也将导致不能够准确地改正声线的弯曲。另一方面,海水声速场也是分析海水信道、海水声场反演、海水声层析的基本工具。
海水声速是海水的一个固有属性,与海水的温度、盐度和压力直接相关,可以直接看成是温度、盐度和压力的函数,如果温度、盐度和压力发生变化,声速也就必然发生变化。由于太阳的照射,海洋表面的温度自然随纬度的变化而变化,同时,海流、洋流的变化,海风、海浪的作用,海水温度、盐度和压力的变化存在十分复杂的规律,既有系统性成分,也包含一定的随机性的成分,很难直接用一个数学模型直接表示全球的海水温度、盐度和压力的实变特性。这也就决定了海水声速同样具有一定的系统性和随机性。正视海水温度、盐度的这种性质,全球目前都是采用数值方法研究海水的温度和盐度[4-6],通过构造海水声速与海水温度、盐度和压力的经验函数,间接研究海水声速的性质。
ARGO浮标就是通过实地测量海水上层的温度、盐度的剖面数据来研究海洋的变化。目前,全球大概有超过3000个ARGO浮标飘浮在各个大洋,实时提供温盐的剖面数据[7]。通过这些实测的数据,可以研究全球海水的温度、盐度的变化,构造全球的海水温度、盐度模型。Reynolds采用OI的方法实现了ARGO浮标剖面数据和卫星辐射遥感数据同化,计算全球标准温度格网[8-10];国内,王桂华等利用ARGO资料重构了太平洋的三维温度、盐度和流场[11]。目前,NOAA发布的SST(全球海水表面温度格网)数据,最主要的数据源就是来自ARGO的剖面数据。然而,基于ARGO浮标数据构造全球三维声速场的文献,目前还不是很多,相关的研究还比较少。本文则基于全球ARGO浮标观测的温盐剖面数据,提出了一种基于面球谐函数展开构造全球海水声速场的模型。通过对非标准的温盐剖面数据进行多项式曲线拟合,计算得到不同深度的全球观测数据,这样则可以计算不同深度的全球海水声速场。该模型可以很好地分析任意深度海水声速的水平分布梯度,可以非常方便地构造和反演水下声场。
2 海水声速映射模型
2.1 常用海水声速映射模型
海水的状态方程[1]:
dp=c2dρ
(1)
其中,ρ为任意一点的密度,p为任意一点的瞬时声压,c为声速。
(2)
其中,ρ,β分别为当前点水介质的密度和绝热压缩系统,海水中ρ,β又都是海水温度t、盐度s和静压力p的函数,因此,声速也是海水温度、盐度和静压力的函数。
c=V(t,s,p)
(3)
经过大量试验表明,海水中的声速的影响规律大概在温度增加1℃时,声速增加约4.15m/s;盐度每变化1‰,声速变化约1.13 m/s;深度增加1m,压力增加约0.1个大气压,声速增加约0.16 m/s。虽然声速可以表示为海水温度、盐度和静压力的函数,但是由于盐度又与温度和压力有关,完整地解析表达还比较困难,通常都采用经验公式进行数值计算。根据不同的试验数据,得到不同的经验公式,其中常用的海水声速经验公式包括Wilson公式(1960)、Leroy公式(1969)、Frye和Pugh(1971)、Del Grosso公式(1974)、Medwin公式(1975)、Chen和Millero公式(1977)、Mackenzie公式(1981)等人发表的公式[4-6,12-14]。由于经验公式都有自己的温度、盐度、压力(深度)适用范围,所以只能适用于特定的海洋区域,超出公式的范围,将导致数据错误。
温度可以通过温度传感器进行测量,盐度通常通过导电性测量而获得,静水压力由海水深度直接计算。Leroy和Parthiot(1998)给出了海水压力P与深度D的转换关系由下式给出:
(4)
国内水下工程上声速计算模型比较常用的是Medwin模型(1975):
C=1449.2+4.6T-5.5×10-2T2+2.9×10-4T3+(1.34-0.01T)(S-35)+0.016D
(5)
其中,C为声速(m/s),T为温度(℃),S为盐度(1‰),D为深度(m),该公式的适用范围:0≤T≤35,0≤S≤45,0≤D≤1000。
该经验公式是Wilson公式(1962)的简化版,故成为Wilson简化公式。
根据我国海区的大量水文资料,《国家海道测量规范》(1998)中采用的经验公式[15]:
C=1449.2+4.6T-0.055T2+0.00029T3+(1.34-0.01T)(S-35)-0.017D
(6)
其中,C为声速(m/s),T为温度(oC),S为盐度(1‰),D为深度(m),该公式的适用范围:0≤T≤35,0≤S≤45,0≤D≤1000。该公式是Medwin公式的变形公式,只能用于近岸的浅水工程。
2.2 精密海水声速经验模型
联合国教科文组织(UNESCO)、国际科学理事会海洋研究科学委员会(SCOR)、国际海洋开发理事会(ICES)和国际海洋物理科学协会(IAPSO)共同采用了Chen和Millero(1977) 提出的海水声速经验公式[6]:
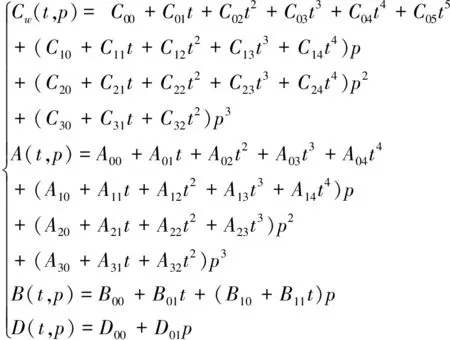
(7)
该经验公式使用42个系数(表1)将声速表示为温度、盐度和压力的五阶多项式,其模型精度达到0.19m/s。该模型的使用范围是:0≤s≤40psu,0≤t≤40°C,0≤p≤1000bar,覆盖了全球所有海域。该模型相对比较复杂,计算量大,但计算精度较高,主要用于科学研究。本文采用了该精密公式计算海水声速。
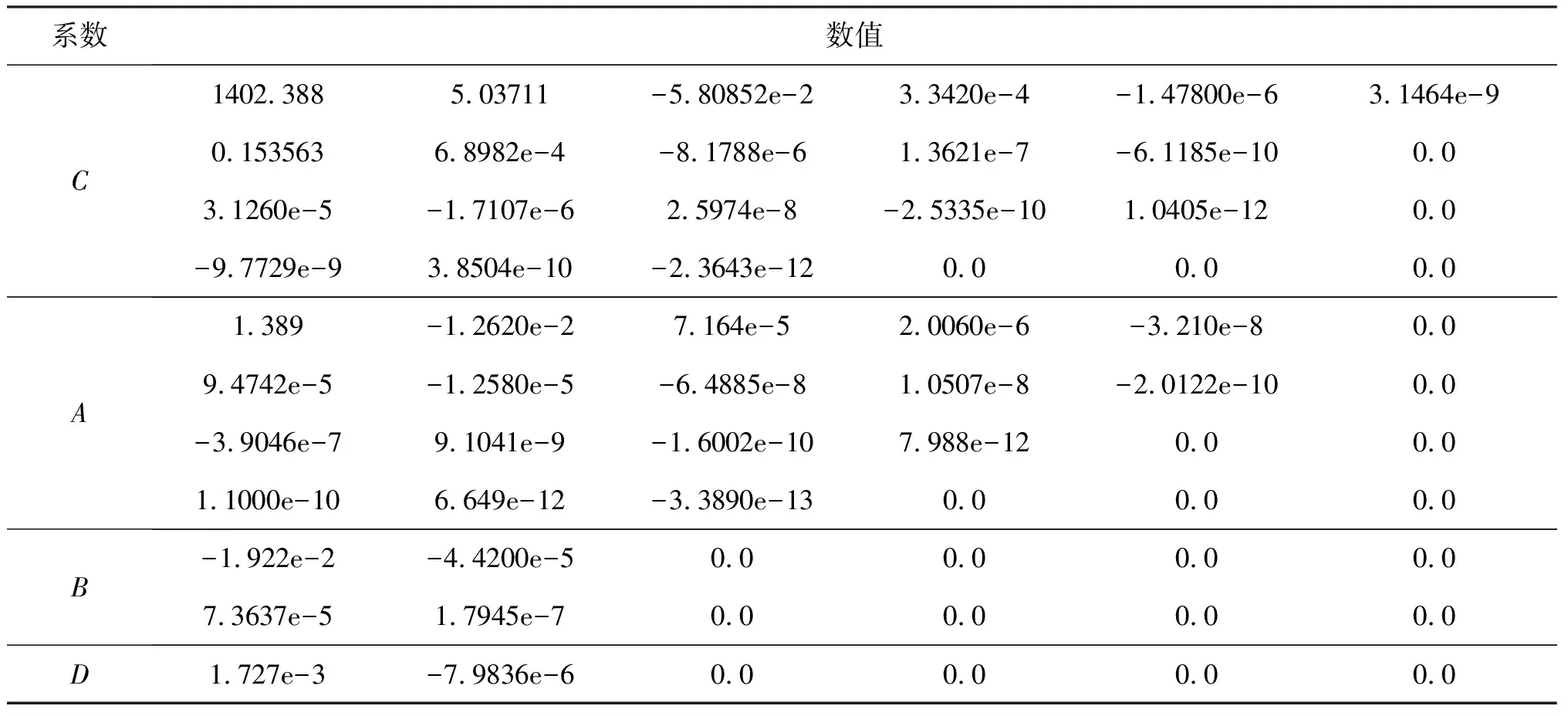
表1 Chen和Millero声速模型的系数
3 由ARGO剖面数据获取海水声速垂直梯度
3.1 ARGO剖面数据
ARGO(the Array for Real-time Geostrophic Oceanography)是一个以剖面浮标为手段的海洋观测系统,其所取得的数据供全世界各国使用。该计划设想用3年~5年的时间,在全球大洋中每隔300km布放一个卫星跟踪浮标,总计为3000个,组成一个庞大的ARGO全球海洋观测网(图1)[7]。
“ARGO浮标”是一种称为自律式的拉格朗日环流剖面观测浮标。当浮标被布放在海洋中的某个区域后,会自动潜入2 000m深处或设定深度的等密度层上,随深层海流保持中性漂浮,到达预定时间(10天~14天)后,又会自动上浮,并在上升过程中利用自身携带的各种传感器进行连续剖面测量。当浮标到达海面后,搜索数据传输卫星,实现自身定位,并通过数据传输卫星系统自动将测量数据传送到卫星地面接收站。浮标在海面的停留时间需约6h~12h,当全部测量数据传输完毕后,浮标会再次自动下沉到预定深度,重新开始下一个循环过程。
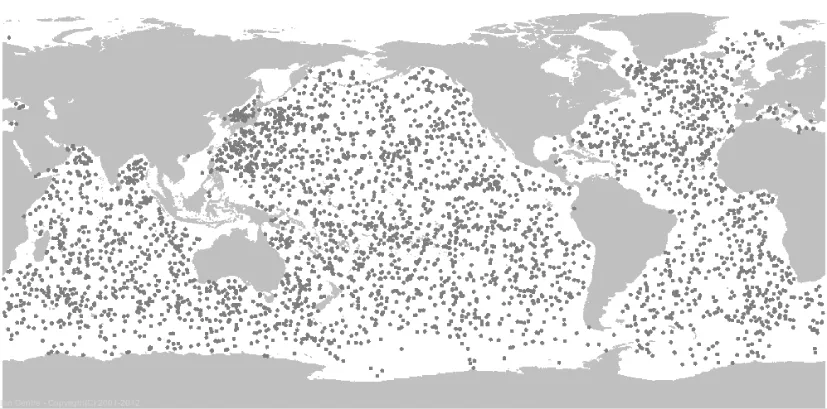
图1 ARGO浮标的全球分布
3.2 多项式拟合ARGO剖面数据
由于ARGO浮标给出的剖面数据是离散的观测数据,该数据是特定位置上的压力和温度、盐度传感器的联合观测值,由于海流等因素的影响,该观测值是深度方向上的非标准的观测值。在进行全球性的数据分析时,需要得到统一的温盐观测量,同时还需要对观测序列中的错误数据进行剔除。本文采用了多项式拟合ARGO浮标的温度、盐度对深度的函数。
温度、深度多项式:
(8)
其中,T(h)为温度深度函数,S(h)为盐度深度函数,h为归一化的深度数值。由于ARGO浮标通常设计的下潜最大深度为2000m,所以,定义:
(9)
根据剖面观测数据,通过最小二乘求解得到拟合多项式的系数。
3.3 ARGO数据的补充
由于ARGO浮标设计的最大深度为2000m,所以ARGO浮标的剖面数据反映上层海水温盐信息,同时,由于表层海水的某些随机性干扰,ARGO剖面数据中常常会出现一些粗差量。另一方面,有些ARGO浮标的观测数据不能够达到2000m,缺少深层海水的信息。因此,在进行数据拟合时,需要将深海稳定的海水信息加入到拟合的模型中,这样实现温度、盐度的深度梯度能够全球统一。
对于深海内部温度统计结果显示,在1000m深处,海水温度为4℃~5℃;在2000m深处,水温为2℃~3℃;3000m深处,水温为l℃~2℃[16]。该信息可以作为ARGO浮标温度拟合的补充观测量。
海水的盐度垂直变化比较复杂。亚热带高盐区从海面一直可延伸到800m~1000m深度。在南北纬40°~50°以外的高纬区,从盐度较低的表层水向下盐度渐增,从1500m~2000m以下盐度几乎不随深度而变化,大约为34.6‰。该信息同样作为ARGO浮标盐度-深度函数拟合的补充观测量,可以很好改善拟合的准确性。
3.4 海水声速梯度
声速随海洋深度增加,呈现洋海内部的声速正梯度(声速随深度增加)变化。在表面等温层和深海等温层之间,存在一个声速变化的过渡区域,这一过渡区域主要呈现温度随深度下降的趋势,称为主跃变层,因而形成典型深海声速剖面图。除高纬度、赤道等特殊区域外,深海的典型“三层结构”是符合海洋结构实际情况的。由于温度、盐度和压力都可以表示为海水深度的函数,因此通过声速度经验映射函数,海水声速对深度映射函数为:
(10)
其中,P(h)为压力深度函数,T(h)为温度深度函数,S(h)为盐度深度函数,f(h)为声速深度函数。同样,采用多项式(式(11))拟合声速深度函数:
(11)
浅海声速剖面分布受到影响的因素更多,但仍有明显的季节待征。在冬季,海水声速梯度大多属于等温层型的声速剖面;夏季则为负跃变层声速梯度剖面。
4 面球谐函数表示声速场
数学理论已经证明,任意定义在单位球面上的平方可积函数或者f(θ,λ),都可以展开为面球谐函数[17]:
(12)
其中,θ,λ分别为余纬和经度,Pnm(cosθ)为伴随Legendre多项式,anm,bnm分别为规格化后的球谐展开系数。
需要说明的是,海水声速是否能够用球谐函数模型表示。海水声速是海水的一个固有特性,要直接使用面球谐函数展开表示全球海水声速模型,就必须要求海水声速本身在球面上具有可积特性。由于声速可以近似表示为温度、盐度和压力的函数,而温度、盐度和压力在球面上可积,则可以近似认为声速在球面上可积。另一方面,地球是一个近似椭球,海洋占据地球的大部分表面,选择一个球面模型来表示地球的某些特性是最直观和最准确的。
由于直接从数学上证明海水声速在球面上可积很困难,所以,本文采用了数学拟合的方法,将海水声速表示为一个通过球谐函数展开的函数模型,因此,只能通过最小二乘来估计面球谐函数的系数,而不能通过积分计算面球谐函数的系数。
根据该球面上的声速观测数据,得到误差方程[18]:
V=AX-f
(13)
其中,A为正则化后的球面位置函数
构成的矩阵,X为正则化系数,f为误差常数项,V为观测残差。通过最小二乘求解得到声速面球谐函数展开的系数:
X=(ATPA)-1ATf
(14)
拟合精度:
(15)
通过声速垂直梯度可以分析声速在海洋垂直方向上的特性,通过面球谐函数模型可以分析声速在球面上的特性。因此,在不同的深度上,分别求解不同的面球谐函数的声速模型,就可以得到全球三维声速布场。
5 试验和验证
为了验证本文的方法,作者开发了专门用于处理ARGO浮标数据的数据处理软件——Intelligent ARGO(图2)。本文的所有结果都是该软件的直接计算结果和截图。
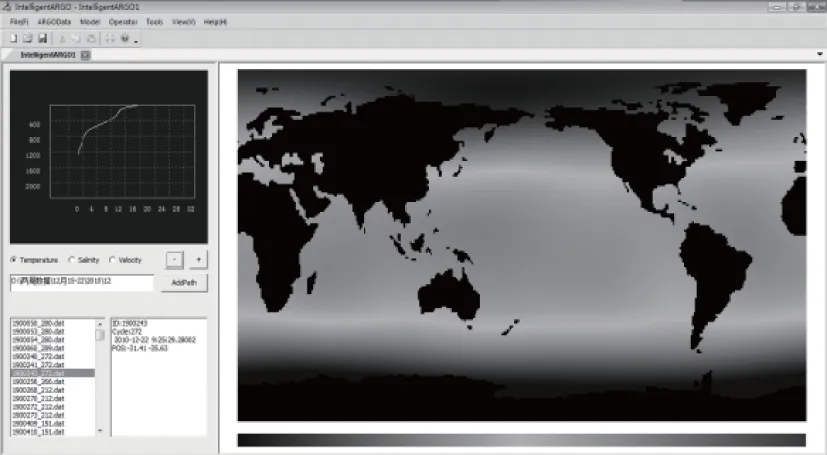
图2 Intelligent ARGO的软件界面
从ARGO数据中心下载了2010年12月15日~17日一周的全球ARGO浮标的温盐剖面数据,一共包括2390个剖面数据文件。对每一个剖面文件先进行压力和深度变换、温盐的曲线拟合、计算标准的温度与盐度层析数据。然后,通过温度、盐度和压力的映射公式计算声速,并得到声速拟合曲线。最后通过球谐函数拟合,获得全球的声速场模型。
5.1 温度盐度拟合
选取ID为1900649的一个ARGO浮标的剖面数据进行温度、盐度地拟合、该浮标是美国布放的一个ARGO浮标,剖面数据的位置是南纬50.097°,东经119.046°。剖面测量采用的是上升过程测量,时间为2010年10月20日。
分别对温度和盐度进行数据拟合,拟合多项式采用了八阶切比雪夫多项式。图3(a)、图3(b)分别是温度和盐度的观测数据和拟合结果。同时,根据温度与盐度和压力采用2.2中的模型计算海水声速,并对海水声速进行拟合,图3(c)为海水声速度拟合结果。
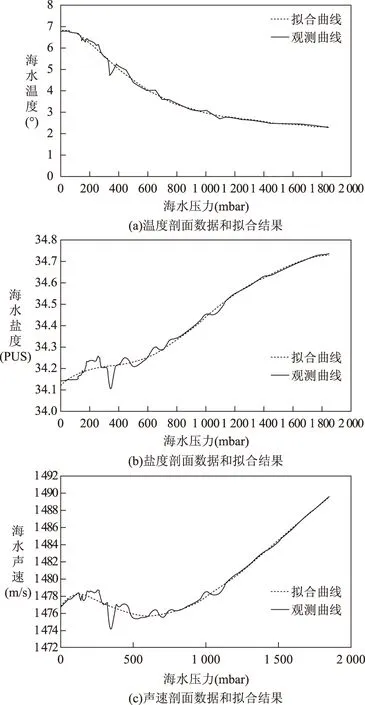
图3 ARGO浮标剖面数据和拟合结果
拟合结果显示,深度小于400m的表层海水由于存在海水热对流等若干的不定因素影响,无论是海水的温度还是盐度,都表现出一定的不规则的深度梯度变化特性,但又不具有完全的随机变化特性。另一方面,由于声速和温度、盐度的函数关系,海水温度、盐度的这种跃层变化,就决定了海水声速也会具有这种无规律的深度梯度特性。
5.2 全球海水声速场
利用覆盖全球的2390个剖面数据,分别拟合得到温度和盐度的深度函数,通过声速度映射公式计算深度分别为5m、100m、200m、300m、400m、600m、800m、1300m、1800m的声速观测数据分布。采用八阶球谐函数模型进行全球声速场的拟合,并根据拟合的全球模型计算得到全球声速场的分布,图4分别是不同深度的全球声速场的分布。
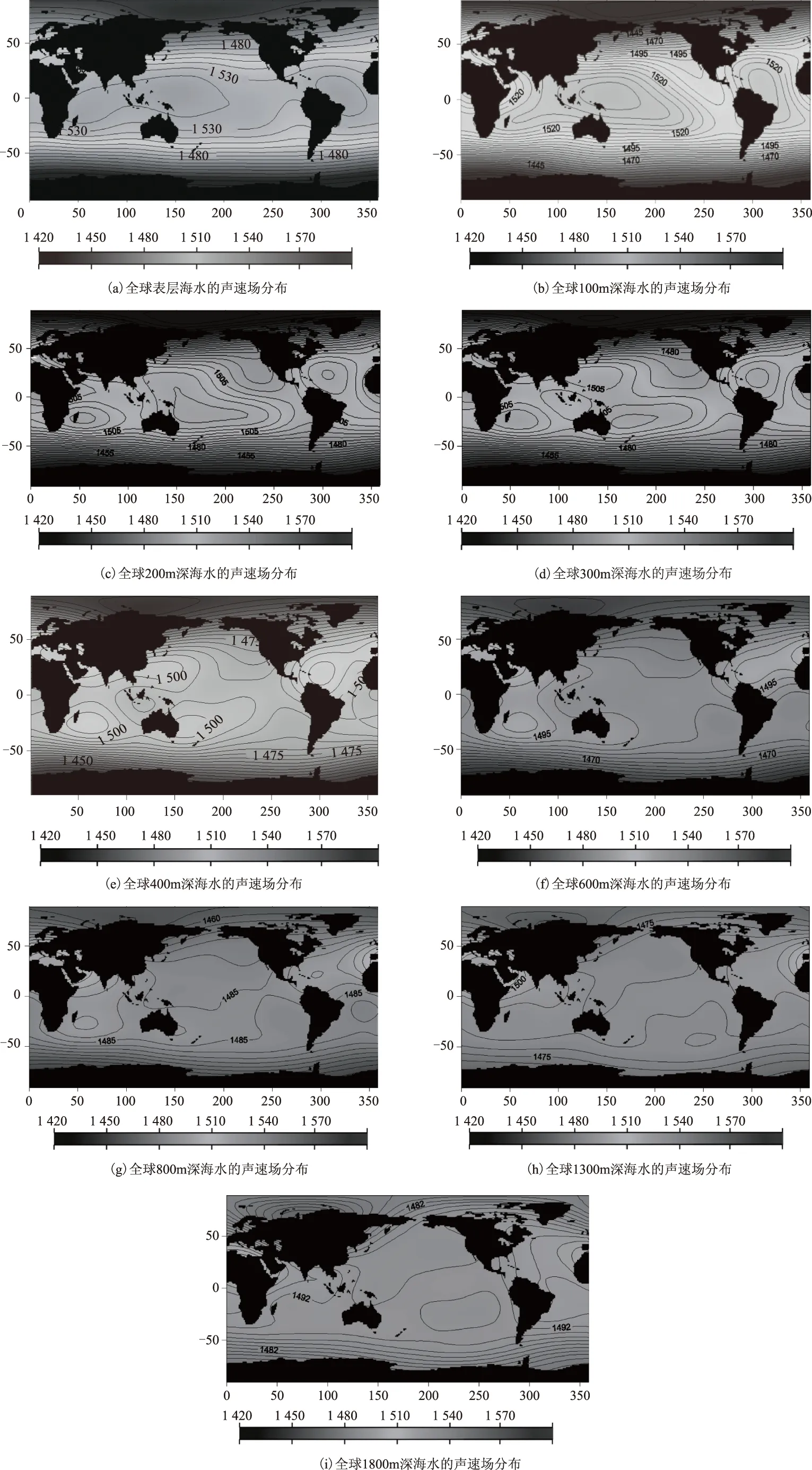
图4 不同深度的全球声速场的分布
通过对全球海水声速场的结果的分析,可以说明:
(1)表层海水声速的水平梯度分布主要决定于太阳的辐射。表层海水声速场存在明显的南北方向梯度变化,而在东西方向上的变化非常小,几乎是平行纬度线(图3(a))。这种变化正好与地球表面温度随纬度的分布相同,而决定这种分布的就是太阳的辐射。同时,在太平洋、大西洋和印度洋都存在一个海水声速度相对较高度区域,该区域也基本上和赤道暖流相吻合。目前,NOAA发布实时的全球海水表面温度格网数据SST,图1显示的结果与NOAA发布的表面SST吻合的很好,也说明海水表面声速场的分布最主要的影响因素是海水的温度。
(2)400m深度以内,随着深度的增加,海水声速变化非常显著。由于400m以内表层风海流、温度对流都比较明显,声速场的变化在一定程度上能够反映海水的这种变化。图3(b)、图3(c)、图3(d)可以明显反映阿拉斯加寒流和秘鲁寒流对东太平洋赤道区域的影响。图3(e)、图3(f)说明,这两股寒流动影响的深度最大也只到600m。但大西洋和地中海区域存在一个深水高温区,因此声速场在此区域存在一个加大的梯度分布。
(3)全球海水声速最小值大部分分布在水下800m~1300m的范围内。海水声速不仅跟温度有关,还跟海水的压力有关,随着深度的增加,海水温度的降低逐渐变小,而海水压力的增大是海水声速变化的主要因素。图3(g)、图3(h)、图3(i)反映了海水声速随深度的增加而显著增加。由于深层海水的温度和盐度都相对比较稳定,在同样深度海水压力作用下,海水声速场的水平梯度变化就不是很明显。
6 结束语
ARGO浮标的剖面数据包含了海水的温度、盐度信息,同时,ARGO浮标的位置变化也反映了洋流的流向和大小。目前,全球的ARGO浮标数量已经超过了3000多个,已经可以获得非常全面的海洋上层的温盐层析数据。基于八阶的Chebyshev多项式表示的海水深度梯度函数、盐度深度函数和声速深度函数可以很好地反映海水的整体垂直特性,同时又具有函数可积分性。另外,采用面球谐函数展开的方式表示全球模型,能够很好地得到该模型的各种频率成分的大小,而且进行全球的分析也非常方便。
参考文献:
[1] 刘伯胜,雷家煜.水声学原理[M].哈尔滨:哈尔滨工程大学出版社,1993:5-10.
[2] 蔡志明(译).水声建模与仿真[M].北京:电子工业出版社,2005:120-143.
[3] 蔡艳辉.差分GPS水下定位系统集成关键技术研究[D].阜新:辽宁工程技术大学,2007:31-45.
[4] DEL G V A.New equation for the speed of sound in natural waters(with comparisons to other equations)[J].Acoust.Soc.Am,1974,56:1084-1091.
[5] FRYE H W,PAUL J D V A.New equation for the speed of sound in seawater[J].Acoust.Soc.Am,1974,50:384-386.
[6] FOFONOFF N P,MILLARD R C.Algorithms for computation of fundamental properties of seawater[D].Unesco Technical Papers in Marine Science,1983:46-50.
[7] Argo part of the integrated global observation strategy[DB/OL].http://www.argo.ucsd.edu/About_Argo.html.
[8] RICHARD W R,THOMAS M S.Improved global sea surface temperature analyses using optimum interpolation[J].Journal of Climate,1994,7(3):929-947.
[9] RICHARD W R.A real-time sea surface temperature analysis[J].Journal of Climate,1988,11(1):75-86.
[10] REYNOLDS R W,RAYNER N A,SMITH T M,et al.An imporved in situ and satellite SST analysis for climate[J].Journal of Climate,2002,15 (4):1609-1625.
[11] 王桂华,刘增宏,许建平.利用Argo资料重构太平洋三维温盐场和流场[C].Argo应用研究论文集,2006:16-26.
[12] JAMSHIDI S,ABU B.An analysis on sound speed in seawater using CTD data[J].Journal of Applied Sciences,2010,10(2):132-138.
[13] MAX Y,DENIS A K.Approximation for the inverse speed of sound in seawater,suitable for assimilating acoustic tomography data into numerical models[J].Journal of Atmospheric and Oceanic Technology,2002,19 (3):1469-1473.
[14] BRIAN D D,PETER F W,BRUCE D C.On equations for the speed of sound in seawater[J].Acoust.Soc.Am,1993,93(1):255-275.
[15] 国家质量技术监督局.GB 12327-1998 海道测量规范[S].北京:中国标准出版社:1998.
[16] 曾一非.海洋工程环境[M].上海:上海交通大学出版社,2007:40-56.
[17] 梁昆淼.数学物理方法[M].北京:高等教育出版社,2003.
[18] 武汉测绘科技大学测量平差教研室.测量平差基础[M].北京:测绘出版社,1978.