车载智能设备处理器的比较与选型
2014-08-01申宇燕关晓晔周忠良
申宇燕,关晓晔,周忠良
(中国铁道科学研究院 机车车辆研究所,北京,100081)
车载智能设备处理器的比较与选型
申宇燕,关晓晔,周忠良
(中国铁道科学研究院 机车车辆研究所,北京,100081)
介绍车载智能设备的工作环境的特殊性,根据车载设备的特殊要求,列出适用于车载设备的多种处理器平台;对各种处理器的性能特点和适用范围进行综合比较和分析,并对选型依据的因素和方法提出建议。
车载;处理器;比较;选型
随着我国铁路建设的发展,车载智能化设备增多,功能越来越强大。在车载电子设备的研制中,如何选择合适的智能设备处理器类型非常重要。在选择处理器时,需要综合考虑应用的各种需求,首先必须考虑到车载智能设备的特殊工作环境;其次,处理器的运算能力、系统的启动速度、具备的接口、可扩展性等是最终设备的选型的重要考虑因素;合理的选择还包括价格和性能的平衡。
1 车载设备工作环境的特殊性
车载智能设备安装在移动的列车上,其工作环境有别于普通环境,具有其特殊性,这些特点必须在产品设计中引起足够的重视:
(1)由于列车是运动的,将承受持续的震动和冲击;车内粉尘较大;
(2)由于我国南北和东西方向地理跨度都很大,造成温湿度有较大,而且地理环境(山区、隧道等)变化也很广;
(3)车载电子设备多、类型广,导致车载设备电磁环境恶劣;
(4)长时间连续运行,无人值守;
(5)无专人进行系统的开启和关闭,所以电源供电和断电是突发式的,而且供电电源干扰大,电压变化范围大;
(6)由于车载设备维修空间和时间均有限制,必须易于维修更换;
(7)投资有限、成本控制严格。
2 车载设备的可选择平台
由于技术的不断进步,同一应用需求,有很多处理器可供选择,都可以满足要求。但是在开始一个新的设计时,准确的处理器选择必须引起足够的重视,因为一旦选定某种处理器,后续的开发工作的技术思路和可以达到的功能范围就基本确定了。
基于上述车载智能设备工作环境的特殊性,车载智能设备的处理器必须具备工作可靠耐用、启动速度块、成本低等特点,具体来说,应该考虑的因素包括:(1)运算和处理能力:必须能够跟上数据处理的速度需求;(2)系统的启动快慢:启动时间长,将导致丢失较长时间段的数据;(3)具有的接口种类:满足实际应用中需要的各种数据接口需求;(4)存储器空间:空间的大小影响能运行的软件程序的大小;(5)磁盘存储空间:满足存储数据的需求;(6)操作系统:是否采用操作系统是一个需要仔细权衡的方面,操作系统可以降低开发工作量,但也有启动时间长、占用存储器空间大、系统稳定性差等缺点;软件安装、发布和升级;(7)用户交互界面:对显示屏、键盘的支持;(8)可扩展性、开发难度等因素。
下面分别介绍适合上述条件的各种智能设备处理器。
2.1 单片微型计算机(单片机)[1]
单片机是典型的嵌入式微控制器(Microcontroller Unit,MCU),和计算机相比,单片机缺少了外围设备等。
图1为一种以单片机为核心构成的车载制动系统监测板卡。
单片机体积小、质量轻、价格便宜,为学习、应用和开发提供了便利条件。在很多方面单片机比专用处理器更适合,因此它得到了广泛的应用。单片机是世界上数量最多的处理器,复杂的工业控制系统上可能有数百片单片机在同时工作,单片机的数量远超过PC机和其他计算机的总和。
2.2 PLC(可编程逻辑控制器)
PLC(Programmable Logic Controller,可编程逻辑控制器)可编程控制器是计算机技术与自动化控制技术相结合而开发的一种适用工业 环境的新型通用自动控制装置,是作为传统继电器的替换产品而出现的。
随着微电子技术和计算机技术的迅猛发展,可编程控制器更多地具有了计算机的功能,不仅能实现逻辑控制,还具有了数据处理、通信、网络等功能。由于它可通过软件来改变控制过程,而且具有体积小、组装维护方便、编程简单、可靠性高、抗干扰能力强等特点,已广泛应用于工业控制的各个领域,大大推进了机电一体化的进程。
图2所示为一种PLC实物图。

图2 PLC实物照片
2.3 ARM
ARM(Advanced RISC Machines)处理器是32 bit精简指令集(RISC)处理器架构,广泛地使用在许多嵌入式系统设计中。ARM处理器的特点是体积小、低功耗、低成本、高性能。ARM处理器的数据处理能力较强(与单片机和PLC相比),用户定制和可开发性强,成本低。
图3所示是以ARM芯片为核心的功能板。
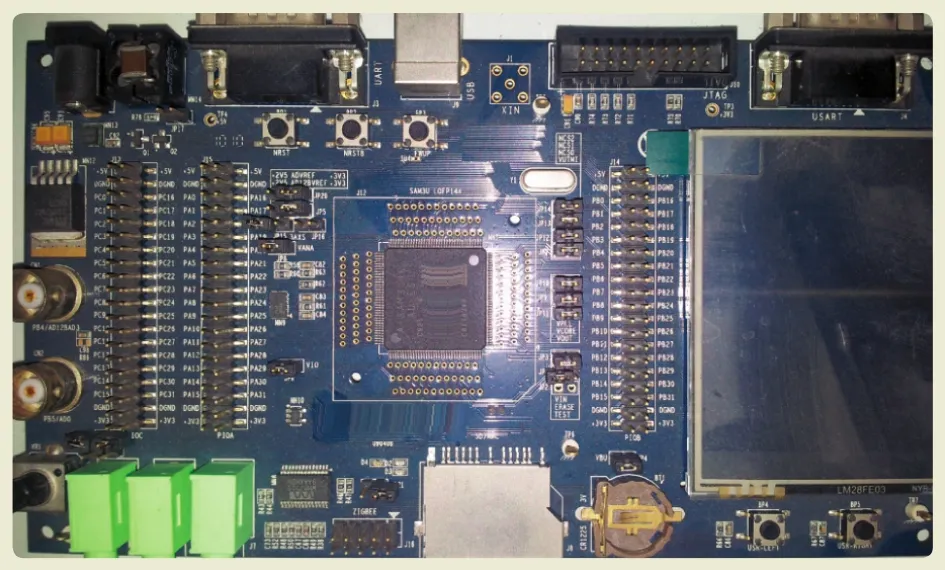
图3 ARM核功能板
2.4 PC104
PC104是一种工业计算机总线标准,是一种专门为嵌入式控制而定义的工业控制总线。PC104的特点:(1)小尺寸结构;(2)堆栈式连接:去掉总线背板和插板滑道,总线以“针”和“孔”形式层叠连接,即PC104总线模块之间总线的连接是通过上层的针和下层的孔相互相连,这种层叠封装有极好的抗震性。(3)轻松总线驱动:减少元件数量和电源消耗,4 mA总线驱动即可使模块正常工作,每个模块1 W~2 W瓦能耗。
图4所示为PC104应用实例。
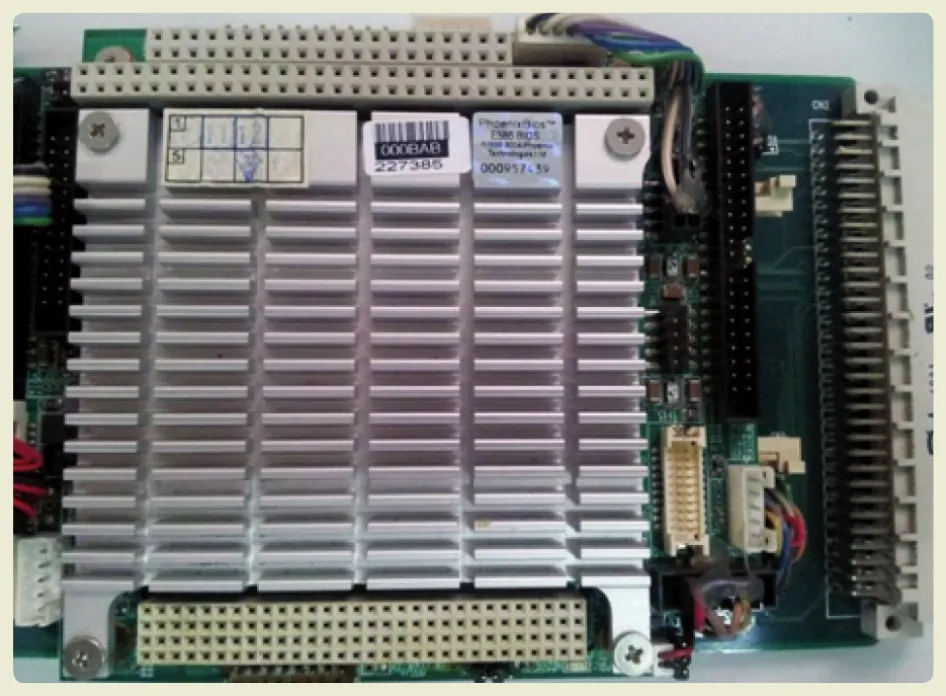
图4 PC104应用功能板
有2种方法使用 PC104模块:(1)独立的模块堆栈;(2)作为元件应用:在这方式下,模块作为用一个高度集成元件,插入一个定制的母板上,母板上包含有应用接口和总线逻辑,它的自我堆栈方式,可在一个位置上安装几个模块。这种方式允许在系统调试或者测试时,临时更换模块,同时有利于将来的产品升级或者更换选件。
由于PC104的管脚定义与ISA、PCI的规范完全兼容,所以在产品内部用 PC104模块时,也可以应自己的需要设计生产更多的专业应用PC104模块种类。X86体系的PC104软件与PC机兼容,便于软件调试和开发。
2.5 工业控制计算机
工业控制计算机(工控机),即基于PC总线的工业控制计算机,因其质量高、产量大、软/硬件资源丰富,已被广泛应用于各种工业领域。其主要的组成部分为工业机箱、无源底板及可插入其上的各种板卡组成,如CPU卡、I/O卡等。一般采取全钢机壳、机卡压条、过滤网、双正压风扇等设计及EMC技术以解决工业现场的电磁干扰、震动、灰尘、高/低温等问题。
图5所示为实际的工业控制计算机(工控机)照片。
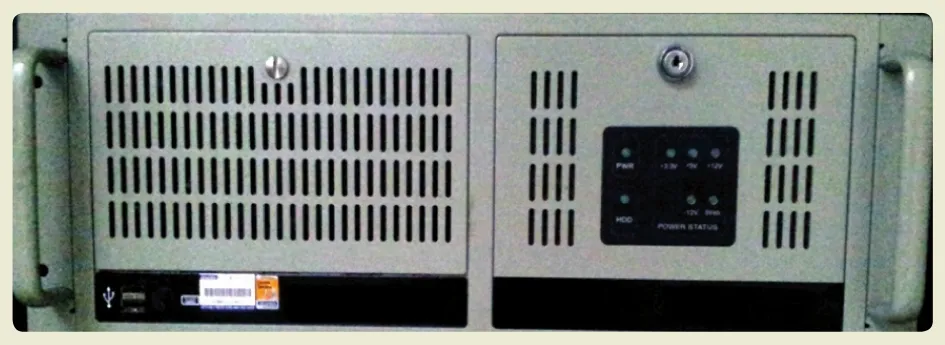
图5 工控机实物照片
工控机有以下特点:可靠性强;可扩充性好;由于采用底板加扩展卡(包括CPU卡)结构,因而具有很强的输入输出功能,最多可扩充20个左右的板卡;兼容性好,与PC机完全兼容,并支持各种操作系统。
3 各种平台的选型和综合比较表
3.1 单片机和PLC的选择
(1)对单项工程或产品运用少的项目,采用PLC方案成功率高、可靠性好,但成本较高。对于大量运用的产品,采用单片机系统具有成本低、效益高的优点。
(2)PLC具有构造简单、抗干扰能力强、扩展容易、编写程序简单等优势,对于大型设备来说,非常易于维护,结构的模块化使其扩展和更换都非常容易。
(3)PLC与单片机相比价格昂贵,而且它的执行速度相对低一些。
3.2 单片机与ARM选择[2~3]
一般单片机使用片上Flash内存存储程序,这样代码启动和执行很快速, 缺点是可用的程序存储空间有限。ARM没有这方面的限制。ARM程序一般存在非易失性存储中,如NAND或者串行Flash,所以只能在启动时读入外部DRAM并提交执行,执行慢一些,但NAND空间可达几百兆甚至吉(G)级。
关于支持的外设和接口,ARM能支持更多的外设种类,即便是同一类外设,ARM具备更多的路数,例如:串口,一般单片机只有2~4路,而ARM可能能提供8路以上,这样就为将来的扩展留下了充分的余量。
处理器性能决定了运行速度、处理能力,如果要运行操作系统,如Linux, Android 或者Windows CE, 单片机就显得力不从心。考虑到将来的发展,ARM余地更大一些。
针对用户界面,简单的按键和液晶显示,单片机足够;但如果交互很复杂,可能需要使用操作系统,适合使用ARM,而且ARM一般都自带对液晶的驱动,可以直接连接液晶显示器。
对于有高速数据传输需求的,如HS USB 2.0, Gigabit Ethernet以太网通信,最好选择ARM,因为通信协议等将占用很多程序空间,而且还有运行速度的问题。
3.3 ARM与PC104
选择ARM和PC104没有明显的优劣,它们的性能、运行速度、可扩展性、可用的操作系统,都差不多。但ARM的定制性强一些,可以从ARM芯片级设计,定制各种外围设备,成本低,可控性强;而PC104是成熟模块,如果选用X86体系,在软件上,与PC机软件兼容,可以利用大量的PC机上的软件,开发、调试都容易,掌握的人也多,熟悉的人也多,维护维修容易。
操作系统上,ARM只能运行嵌入式操作系统;PC104既可以采用嵌入式操作系统,也可以采用桌面Windows系统。
由于ARM的启动系统是非易失性的,操作系统不易损坏; PC104,一般是磁盘启动,属于磁盘操作系统,容易损坏和崩溃,近年来有采用FLASH存储操作系统的PC104产品,可靠性有所提高。
3.4 综合选择总结
各种平台的比较如表1所示。
(1)性能足够时,优先选择单片机;单片机性能不满足时,选择ARM;
(2)快速开发、应用数量有限、技术人员开发水平有限时,选择PLC;
(3)需要具备操作系统(如需要使用实时操作系统)时,选择ARM或PC104;
(4)综合型大系统、性能要求高、应用需求经常变化时,选择工控机,如铁路领域的各种综合试验车、列车娱乐播放系统主机。
4 结束语
由于车载设备工作环境的特殊性,选择适合于车载环境的智能设备处理器非常重要。根据车载设备的特殊要求,可以使用单片机、PLC、ARM、PC104、工控机等多种处理器平台。各种处理器都有其特点,结合各种处理器的性能特点进行综合比较和分析,选择合适的处理器,对于产品的开发调试、日后的生产维护和扩展有重要意义。
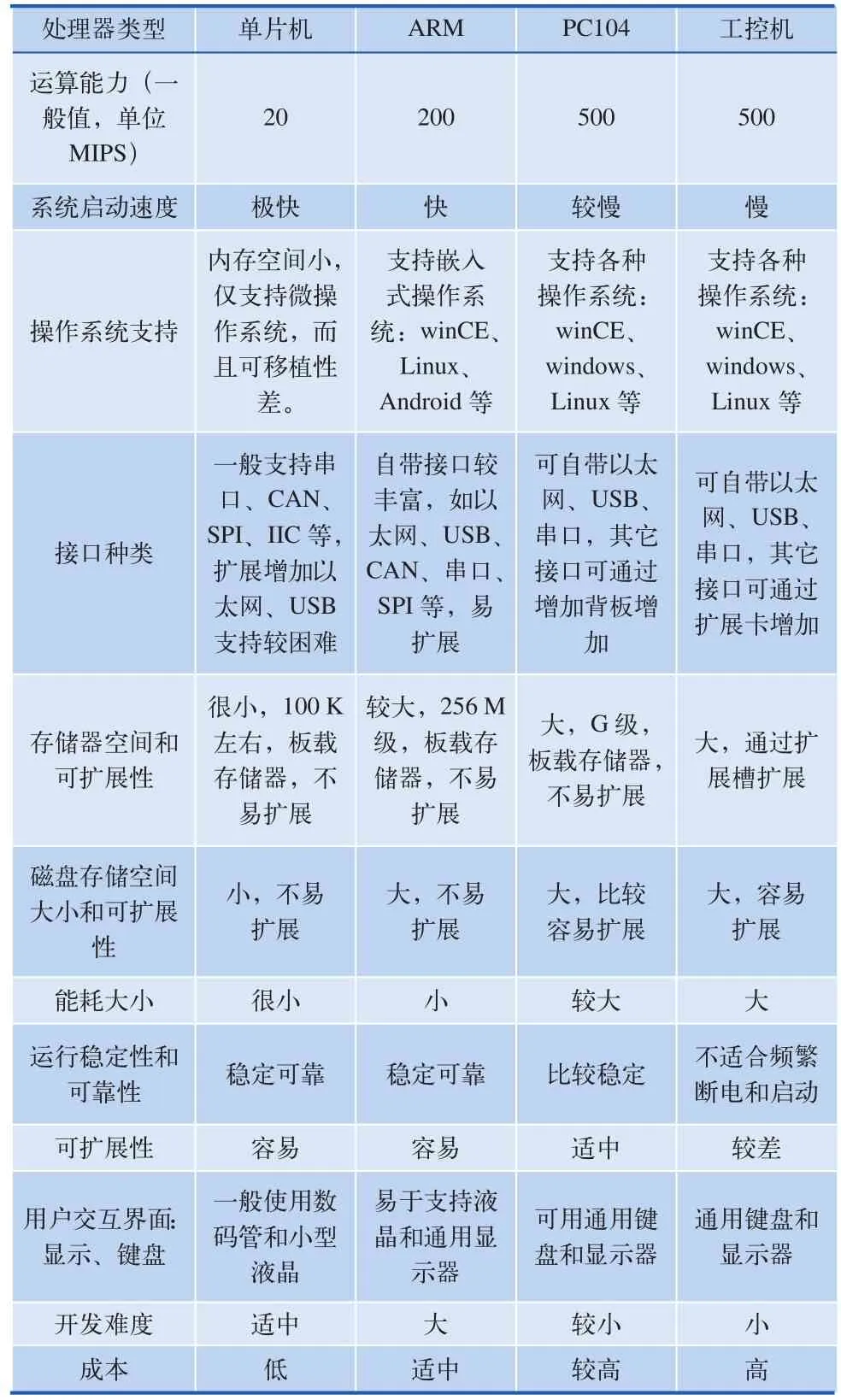
表1 各种平台的比较表
[1]黄亮亮,朱欣华. 基于实时多任务操作系统μCOS-II的C8051F系列单片机应用系统开发[J]. 测控技术, 2005(9):19-21.
[2] Frederic Gaillard. Microprocessor (MPU) or Microcontroller (MCU)? What factors should you consider when selecting the right processing device for your next design[R]. Atmel-Cor poration, 2013, 3.
[3]罗 佳,孙运强. 51 系列单片机与ARM处理器的比较[J].工业控制计算机,2007,20 (5): 64-66.
责任编辑 徐侃春
Comparison and lectotype of processor for on-board intelligent device
SHEN Yuyan, GUAN Xiaoye, ZHOU Zhongliang
( Locomotive & Cars Research Institute, China Academy of Railway Sciences, Beijing 100081, China )
The Characteristic of working conditions for on-board intelligent devices was introduced at fi rst, then based on it, several practicable platforms were listed here. The performance, characteristics and their application scopes were compared and analyzed synthetically. The factors and methods about how to select a suitable processor was suggested.
on-board; processor; comparison; lectotype
U260∶TP39
A
1005-8451(2014)02-0054-04
2013-12-06
铁道部科技研究开发计划(2012J006-A)。
申宇燕,助理研究员;关晓晔,助理研究员。