RANSAC算法在剔除图像配准中误匹配点的应用
2014-07-31邱亚辉李长青崔有帧
邱亚辉,李长青,崔有帧
(北京工业职业技术学院,北京100042)
RANSAC算法在剔除图像配准中误匹配点的应用
邱亚辉,李长青,崔有帧
(北京工业职业技术学院,北京100042)

在遥感图像中存在很多相似地物、地貌,SIFT算法本身只利用了特征点的局部邻域梯度信息,通过SIFT算法提取到的特征点存在很多误匹配点,通过RANSAC算法剔除误匹配点,可以提高配准的精度。
SIFT算法;误匹配点;RANSAC算法
1 引言
SIFT特征对所提取出来的特征点进行特征点粗匹配,由于SIFT算法本身只利用了特征点的局部邻域的梯度信息,而且影像中的地形、地貌有时候会出现相似的地方,经过SIFT算法提取到的特征点并经过粗匹配后,在基准影像中的某个特征点在待配准影像中会提到多个相似的特征点,即一对多的现象(如图1所示),同时基准影像中的多个特征点也会对应待配准影像中一个特征点,即多对一的现象(如图2所示)。
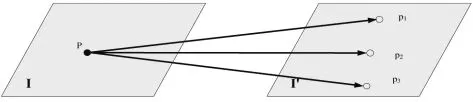
图1 匹配点一对多
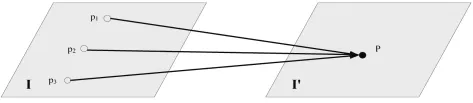
图2 匹配点多对一

图3 删除一对多和多对一后的匹配结果
通过配准结果可以看出,用SIFT算法提取特征点后,即使剔除一对多和多对一的误匹配点以后,依然存在太多的错误,为了提高配准的精度,必须应用合适算法剔除全部错误的匹配点。
2 RANSAC算法
经过SIFT特征粗匹配后,我们得到了大量的匹配点对,剔除了一对多和多对一的点后其中仍旧存在部分错误匹配点,经过斜率约束后可以将明显错误的匹配点剔除,利用极线约束可以删除小部分错误不太明显的匹配点对。至此,匹配点对已经相对准确,但却仍旧存在部分外点,需进一步通过RANSAC(随机取样一致性)算法进行剔除外点,并且可以通过该算法对某个模型进行稳定估计。RANSAC算法最早由Fischler和Bolles于1981年提出,它可以从一组包含“外点”的观测数据集中,通过迭代方式估计数学模型的参数,并通过设定相关阈值,可以稳定地将整个样本当中的“外点”或者“噪声”剔除,RANSAC算法是鲁棒性很高的算法,该算法先随机的从整个数据集当中选取最小抽样集,并通过这些抽样集计算出相关模型参数的初始值,再通过计算出来的模型来寻找数据集中的其他内点,并将外点剔除,以此来最大程度的消除外点对整体估计的影响。
对于每一对相邻的影像,已知存在M对同名点,由于经过前面一系列的约束后,M对同名点中只存在极少量的错误匹配点,对于本文所采用的RANSAC算法,我们设定以下参数:最大内点数max_inliner=0,反投影误差阈值threshold=4,min_std=10e5,最大循环次数max_circle=1000,p= 0.99,当前内点距离标准差cur_std,numof_inliner为当前所对应的内点数,根据当前一H˜所计算出的各对同名点的反投影距离为:

具体的RANSAC算法流程图如图4所示:

图4 RANSAC算法流程图
图4表示了本文所采用的RANSAC算法的基本流程。首先设置相关初始化的参数,然后从样本中选取四对不共线的匹配点对组成一个随机样本,并采用归一化线性变换计算局部变换矩阵H的8个未知参数,再通过计算出的局部H来计算其余特征点对的反投影误差距threshold的内点个数numof_inliner,若numof_inliner>=max_inlier,更新当前H,计算所有内点,最后根据所有内点数重新计算H。RANSAC算法本身可以从含有较多错误点对的点集中稳定的估计出相应模型的参数,但前提是将循环次数设置成无穷大,而在本文中,我们将最大循环次数max_circle直接设置成1000,这是因为我们的样本集已经是经过了一系列的剔除错误点步骤后而得来的,样本集内部的错误点已经很少,这就可以使得其在循环了1000次后必定能够估算出很稳定的模型参数,并剔除相应的外点。这也是将RANSAC算法放在前面的一系列步骤之后的原因。经RANSAC算法剔除外点后,其结果如图5所示,图中白线即为剔除的外点。

图5 RANSAC剔除外点结果
3 总结
本文主要是研究了剔除特征点误匹配,首先是初步的介绍了误匹配点产生的原因,为了提高配准的精度,我们应用了RANSAC算子,并且介绍了RANSAC算子的基本思想以及如何求解二维图像的变换矩阵,最后分别运用上述三种剔除外点的方法删除了配准中的误匹配点,最后给出匹配结果,从而达到更加精确的配准精度。
[1]H.P.Moravec.Visual Mapping by a Robot Rover[C]. International Joint Conference on Artificial Intelligence,1979: 598-600.
[2]C.Harris,M.Stephens.A combined corner and edge detector[C].Fourth Alvey Vision Conference,1988:147-151.
[3]S.M.Smith,M.Brady.SUSAN-a new approach to low level image processing[J].Interational Journal of Computer Vision,Vol.23,No.1,1997:45-78.
[4]David G.Lowe.Object recognition from local scale-invariant features[C].In ICCV,1999:1150-1157.
[5]David G.Lowe.Distinctive Image Features from Scale-Invariant Key points[J].International Journal of Computer Vision,2004,60(2):91-110.
[6]林婧,郝永平,华宇宁.SIFT特征在图像配准过程中的应用研究[J].沈阳理工大学学报,2009,28(5):26-29.
[7]陆菲菲,奚玲,岳春生.利用几何精校正进行多尺度数字栅格地图配准[J].计算机应用,2006,26(12):115-117.
[8]李柏林.基于特征点图像拼接的配准算法研究[D].天津:天津大学硕士论文,2008.
P237;TP751
B
10.3969/j.issn.1001-0270.2014.04.20
2014-02-25
