单矢量传感器目标定向原理*
2014-07-25刘国勤
刘国勤
(海军驻上海江南造船集团有限责任公司军事代表室 上海 201913)
单矢量传感器目标定向原理*
刘国勤
(海军驻上海江南造船集团有限责任公司军事代表室 上海 201913)
声矢量传感器可以同时获取声波场的声压和振速信息。因振速是一个矢量,因而单个矢量传感器就能够提供声场的方位信息,为小尺度声传感器的设计提供了可能。论文首先对单矢量传感器目标定向的原理进行了研究,在单频信号处理的基础上扩展到实际中的宽带随机信号的处理,并进行了仿真分析研究。
偶极子; 矢量传感器; 目标定向
ClassNumberTP212
1 引言
声波兼有标量场和矢量场,它们分别是声压和振速。传统的水听器(声压型接收换能器)只能接收声压信息,它把声场中的声压信号转换成与之成比例的电信号。声压是个标量,因此,传统的水听器是无指向性的。这样单个水听器不能提供目标和环境的方位信息,必须用多个水听器形成基阵,利用不同阵元的相位延时来获得目标和环境的方位信息。矢量传感器可同时获得目标信号的声压和振速信息,这使得水声信号处理的空间得以扩展,可以在这四个包含目标方位信息的量(p,vx,vy,vz)及其变换域中进行联合处理,因而有更多的实现方法。同时,单个矢量传感器已经包含目标的方位信息,可以实现小尺度定向,使水声基阵走向小型化成为可能,为在各种场合下的应用带来了可能。矢量传感器在甚低频也存在指向性,因此为低频处理带来方便。而传统的水听器要利用20Hz的线谱辐射来定向,基阵的尺度要达到数公里长,实现与应用均非常不便。大多数感兴趣的水下目标均辐射数赫兹到数千赫兹的强的低频线谱,海水介质对这样的低频声波吸收很小,因而利用这些低频线谱可实现远程探测与定向。
2 单矢量传感器目标定向
2.1 偶极子指向性形成
偶极子是由两个具有相同接收灵敏度的水听器组成的,它们的等效声中心非常接近。如图1所示,假设它们的间距为d0,声源点T与组成偶极子的两个单极子连线的中心点O的距离为r。在坐标系中,T与-A和A的距离分别为r1和r2,θ为目标的方位角。


式中,k=2π/λ,称为波数,A为声压振幅。由于d0/2≪λ,d0/2≪r可得:


图1 偶极子
因此偶极子指向性的一般表达式为
进一步讨论,当kd0≪1,即2πd0/λ≪1时,利用sin(x)≈x(x→0)的近似表达式,可得:
在满足d0≪λ时,偶极子所产生的声压与单基子所产生的声压相位相差π/2,并用cosθ来修正,而θ正是目标的方位角。偶极子形成的指向性如图2所示。

图2 偶极子指向性图
2.2 偶极子目标定向原理
用两对几何位置相互正交的偶极子可构成一个单矢量传感器,它所产生的一对相互正交的指向性图案可进行目标定向。
如图3所示,两对偶极子在几何位置上相互正交,T假设为一点声源,与坐标系原点的距离为r,与两对偶极子四个水听器的距离分别为r1、r2、r3、r4,每对偶极子中两个水听器间的距离均为d0。与单个偶极子指向性的分析一样仍假设声源T产生一单频信号,设为st=Aejωt。

图3 几何位置正交的两对偶极子

近似后分别为R1(θ)=cosθ,R2(θ)=sinθ
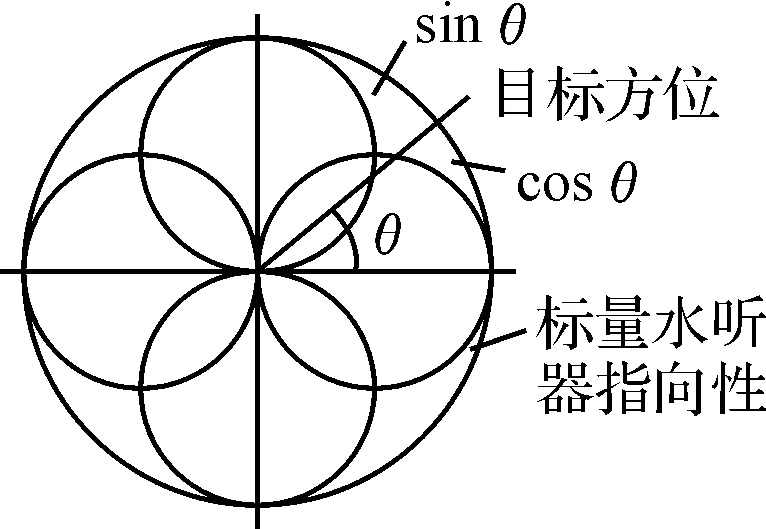
图4 单矢量传感器指向性图
假设信号st经过两对偶极子后受到cosθ和sinθ的修正,为方便起见,暂不考虑信号幅度和相位的变化,仍认为是st,则有:
u1=stcosθu2=stsinθ
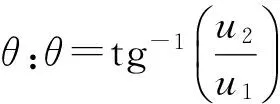
式中θ表示方位角。那么,θ便可以这样求出:

从上面的推导中可以看出,利用偶极子来进行目标定向是非常方便的,它可以由接收到的信号进行一次反正切计算便可得到目标方位,也可用指向性旋转的方法估测目标方位,也就是通过加权的方法使某个方位输出最大最小化来探测目标方位。
设φ为某一假想的目标方位,称为引导方位。构造如下组合:
uc=u1cosφ+u2sinφ
us=u2cosφ-u1sinφ
可得:
uc=stcosθcosφ+stsinθsinφ=stcos(θ-φ)
us=stsinθcosφ-stcosθsinφ=stsin(θ-φ)
可以看出,当引导方位角φ=θ时,uc达到最大,同时us为最小,则这时目标就在方位φ上出现。实际中,可以在整个侦察范围内假设多个φ,构成引导矢量表,找出使uc最大,同时us最小的那个φ值,即可求得目标方位θ。
2.3 单频信号通过单矢量传感器目标定向
设源信号为st=Acos(ωt),其中A为信号振幅。设目标方位角为θ,信号源到偶极子中心的距离为r。单矢量阵偶极子中水听器间距为d0。那么,到四个接收点的距离分别为
r1=r+d0cos(a)/2+其他高阶项;
r2=r-d0cos(a)/2+其他高阶项;
r3=r+d0sin(a)/2+其他高阶项;
r4=r-d0sin(a)/2+其他高阶项。
那么到达四个接收点的信号分别为
x1=Acos(ωt-kr1)x2=Acos(ωt-kr2)
x3=Acos(ωt-kr3)x4=Acos(ωt-kr4)
求两个差路信号可得:


于是有:

也可以通过波束旋转的方法得到方位角θ:
令:
uc=u1cosφ+u2sinφus=u2cosφ-u1sinφ
可得:

可以看出,当引导方位角φ=θ时,uc达到最大值,us则同时取得最小值,这时目标就在方位φ上出现。
2.4 宽带随机信号通过单矢量传感器目标定向
假设声源信号st为一宽带随机信号,到达四个接收点与到达传感器中心点的相对延时分别为:

为了信号处理上的方便,以及利用前面窄带信号的研究成果,这里将宽带随机信号变换到频域中去处理。在频域中延时可利用离散傅立叶变换的圆周移位的性质来实现:对于一个离散序列x(n),其傅立叶变换后为X(k)(X(k)=DFT[x(n)]),那么DFT[x(n-m)]=X(k)exp(-j2πmk/N)。按照这个思路实现延时后,四个接收点接收到的信号可分别表示为



可以看出差路信号有π/2的相位差,并且分别随方位角θ做余弦和正弦函数变化。对u1和u2分别做傅立叶变换,以得到信号的声压:

宽带信号与单频信号不同的是,每一个k值,即每一个频率点上,都可以得到一个tgθ,所以求θ的方法不唯一,可以求出每个k对应的tgθ,再取平均值,也可以先将每个频率对应的声压相加后做比值得到正切值,再得到方位角,还可以取信号最强,即声压最大的那个频率点来求θ。
3 计算机仿真及结果分析
用Matlab软件进行计算机模拟仿真,对矢量传感器在目标定向方面的应用进行验证。仿真分析可以看出,原始指向性函数是入射角θ的函数,该指向性函数与信号的频率有关,由于kd0/2≪1,所以有R(θ)≈cosθ,但近似后的误差将随着信号频率的增加而不断增大,当f=100Hz和f=1000Hz时误差非常的小,分别是10-7和10-5数量级的;当f=10000Hz时,误差也很小,只有10-3数量级,而当f=100000Hz时误差就非常大了,最大值达到了0.5,这说明当信号频率小于10000Hz时偶极子指向性受信号频率的影响非常小,可以用cosθ和sinθ来近似,但当信号频率达到100000Hz时,误差就非常大,应该用原始的指向性函数。无背景噪声时采用直接求反正切的方法之所以有误差,主要是因为利用了sin(x)≈x(x≪1)的近似。
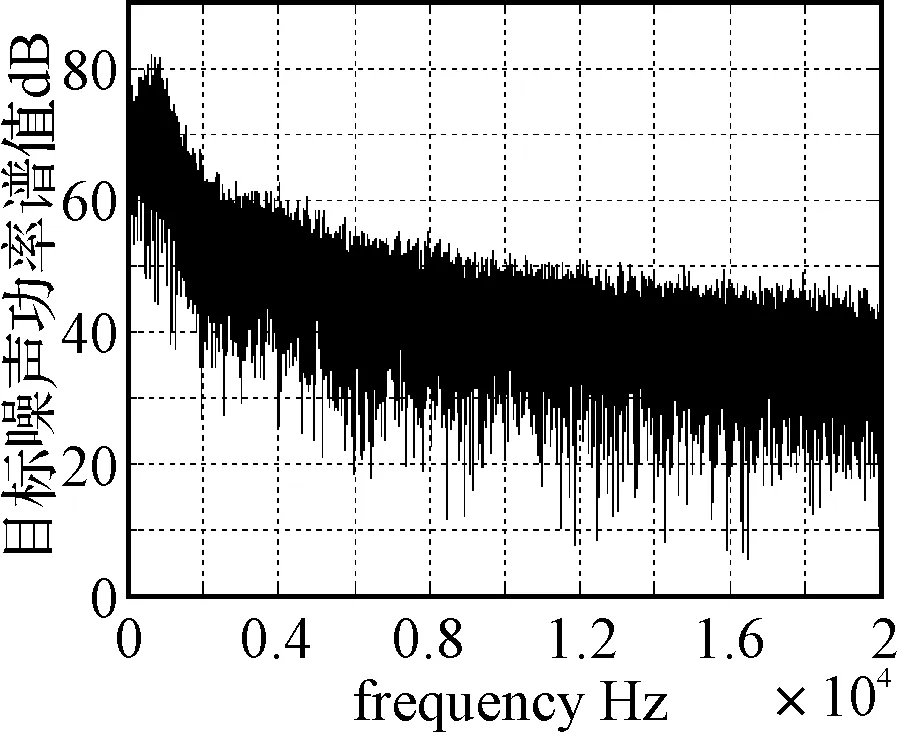
图5 目标噪声功率谱
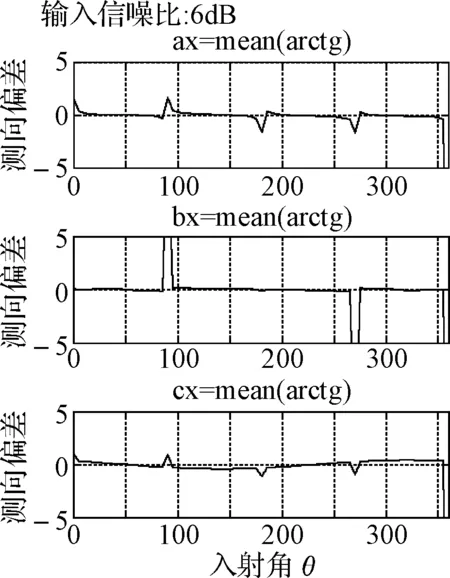
图6 叠加相关噪声,信噪比为6dB的测向偏差
宽带随机信号在不同信噪比下通过单矢量传感器定向的偏差,采用三种方法进行仿真处理,ax是求出每个频率对应的方位角,然后再取平均;bx是先对频谱值取平均再取反正切;cx是对谱值最大的取反正切。由于信号能量主要集中于1000Hz以内,这里只在20Hz~1KHz内取处理。仿真结果显示:在低输入信噪比情况下,bx、cx的精度较高,但bx在π/2和3π/2入射方位时的测向偏差非常大,cx小一些;ax虽然在π/2和3π/2的入射方位上偏差小于bx但整体偏差较大,必须在较大的输入信噪比下才能获得较好的效果。宽带噪声通过单矢量传感器目标定向同样也存在π/2的整数倍的入射方向上偏差较大的现象,也可以通过电子旋转的方法加以解决。
4 结语
矢量传感器因为采用了偶极子,具有偶极子的指向性,当频率在一定范围内,几乎与频率无关,可以在较低频率下工作,提高探测距离;可以在声压和振速及它们的变换域中进行处理,无论在窄带领域还是宽带领域都能够进行目标定向;单个矢量传感器既可获得目标方位信息,为实现小尺度定向提供了可能。矢量传感器并没有完全脱离传统的水听器,而是在其基础上发展起来的,因此,矢量传感器仍可借鉴传统水听器及其阵列的处理方法,再结合自身的特点加以改进以达到更好的效果。矢量传感器进行目标定向时可以不存在左右弦模糊问题,判断目标方位象限较为容易,而传统水听器及其阵列定向是存在左右弦模糊,需采用两条线阵或线阵旋转90°进行两次定向等方法来克服。
[1]李启虎.声呐信号处理引论[M].北京:海洋出版社出版,1980.
[2]A. Nehorai, E. Paldi. Acoustic vector-sensor array processing[C]//Proc. 26th Asilomar Conf. Signals, Systems and Computers, Pacific Grove, CA,1992:192-198.
[3][美]R. J. Urick.水声原理[M].哈尔滨:哈尔滨船舶工程学院出版社,1990.
[4]惠俊英,等.声压振速联合信息处理及其物理基础出探[J].声学学报,2000,25(4).
[5]王玉泉.水声设备[M].北京:国防工业出版社,1985.
[7]杜功焕.声学基础[M].上海:上海科学技术出版社,1986.
[8]邹理和.数字信号处理[M].西安:西安交通大学出版社,1991.
TheoryofObjectLocalizationofSingleVectorSensor
LIU Guoqin
(Military Represensative Office of Navy in Shanghai Jiangnan Shipbuilding Grope Co. Limited, Shanghai 201913)
The acoustic vector senso can provide the information of the acoustic pressure and acoustic particle velocity. Because acoustic particle velocity is a vector, the information of the direction can be obtained with the help of only one vector sensor. This makes it possible to design a smaller sensor. In this paper, the theory of object localization of single vector sensor is studied at first, and the single-frequency signal transaction is extended to wide-band signal transaction. The simulation analysis is conducted.
dipole, vector sensor, direction of arrive
2013年10月5日,
:2013年11月29日
刘国勤,男,硕士,工程师,研究方向:通信工程。
TP212DOI:10.3969/j.issn1672-9730.2014.04.046