组网雷达情报交互格式设计与转换*
2014-07-25韩文彬李晓燕王华兵郭金良
韩文彬 李晓燕 王华兵 郭金良
(中国洛阳电子装备试验中心 洛阳 471003)
组网雷达情报交互格式设计与转换*
韩文彬 李晓燕 王华兵 郭金良
(中国洛阳电子装备试验中心 洛阳 471003)
随着雷达网络化、数字化、信息化技术不断发展,组网雷达情报交互一致性需求日显突出。面向组网雷达情报共享需求,分析了雷达情报交互结构及关键要素,分析并明确了各个情报要素的不同格式定义及差异,研究了情报要素格式选择方法和转换技术,能够支撑组网雷达情报传递、转换和处理设备的设计和实现。
组网雷达; 指挥控制; 情报交互; 情报格式
ClassNumberTN95
1 引言
信息化战场条件下,军用雷达作战运用方式将从单体作战向网络化、数字化、信息化的组网作战转变。雷达组网,是指通过将多部不同体制、不同频段、不同模式、不同极化雷达适当布站,借助于通信手段链接成网,由中心站统一调配从而形成一个有机整体。网内各雷达的信息(原始信号、点迹、航迹等)由中心站收集,综合处理后形成雷达网覆盖范围内的情报信息,并按照战争态势的变化自适应地调整网内各雷达在工作范围内的探测、定位和跟踪。
为了实现组网雷达之间情报共享,必须进行规范、合理的情报交互设计,使得雷达情报在网内语义明确、基准一致,并且确保在信息传递、转换和处理过程中的正确表达与理解。
2 情报交互结构及关键要素

图1 情报交互结构
组网条件下,将所有雷达情报纳入到以信息为中心的网络化管理框架下,实行统一管理和统一运用。组网雷达情报采集与融合处理,是组网雷达指挥控制系统的重要组成部分。根据组网雷达指挥控制结构[1~4],得到图1所示的组网雷达情报交互结构。其中,雷达为网内情报源,通过探测形成点迹情报或航迹情报;情报中心为情报采集和处理单元,对所有雷达情报进行融合,产生融合情报并进行上报和网内共享;指挥中心和网内雷达为情报使用单元,指挥中心利用融合情报支撑指挥决策,网内雷达利用融合情报进行引导搜索或组网抗干扰等。
在组网雷达指控交互的所有信息中,雷达情报是交互最频繁、数据量最大的信息,也是直接支持组网应用的关键信息。因而,情报交互格式设计时应考虑各项要求,主要包括准确传输雷达情报而不降低精度,数据量尽量小以降低通信负荷,语意明确而不会被误用等。
雷达情报要素主要包含批号、敌我属性、机型、目标位置及时戳(录取时间)等。其中,目标位置和时戳的表示格式较多,对于融合情报质量影响最大;批号、敌我属性、机型等要素语义简单,易于网内统一。另外,组网情报融合是基于相同的参考坐标系进行的,需将不同雷达情报转换到相同坐标系,因而情报融合质量也会受到雷达定位和定北信息的影响。因此,本文将目标位置、时戳、定位、定北等信息作为雷达情报交互关键要素进行分析。
3 目标位置格式
雷达上报目标位置常用的坐标系主要有雷达站球坐标系、雷达站直角坐标系、地心空间直角坐标系等。
3.1 坐标系选择
雷达站球坐标系定义:以雷达天线中心为原点,R为目标斜距离,A为目标视线在原点法平面投影与正北夹角(以北偏东为正),E为目标视线与原点法平面夹角(以向上为正)。
· 雷达站直角坐标系定义[5]:又称为地理坐标系,以雷达天线中心为原点,Xr轴在原点法平面内指向正东,Yr轴在原点法平面内指向正北,Zr轴按照右手法则确定,即所谓东北天坐标系。
· 地心空间直角坐标系定义:以地球质心为原点,Xe轴指向本初子午线与赤道交点,Ze轴沿地球自转轴指向北极,Ye轴以右手系确定。
此外,许多对空情报雷达可直接上报高度,因此会采用混合坐标(距离R、方位A、高度H)。
雷达站球坐标是点迹原始坐标格式,各维探测精度确知且相互独立,因而能够分别设计量化单元和取值范围。雷达站直角坐标值由球坐标值转换而来,各维探测精度不固定,且取值范围都较大,只有量化单元小于距离精度,才能不破坏雷达原有精度。空间直角坐标与雷达站直角坐标类似,但由于以地心为原点,使得各维数值非常大,大大增加了量化范围。因此,在不失精度条件下,雷达站球坐标格式信息冗余最小,所需数据量最小;空间直角坐标格式所需数据量最大。
由于情报融合通常是在以融合中心为原点的直角坐标系进行,因此需进行情报格式转换。雷达站直角坐标格式转换,在融合中心与雷达站相距较近情况下可近似为坐标平移,因此计算量较小;雷达站球坐标与空间直角坐标格式的转换,则必须经过非线性计算,因此计算量较大。
总之,坐标系选择需对数据量和计算量进行综合考虑,在融合中心计算量足够时可应采用雷达站球坐标或混合坐标格式,在通信带宽足够时可采用雷达站直角坐标格式。
3.2 高度定义与转换
根据雷达工程实践的不同,雷达情报中的目标高度存在不同的定义,容易导致雷达站球坐标系与直角坐标系之间转换的高度误用。常规的坐标系转换方法[5~6]已经很成熟,本文不再赘述,以下重点分析不同高度定义的影响。
根据高度基准不同,目标高度可分为绝对高度和相对高度。绝对高度是指目标所在位置的大地高或者海拔高,高度基准是地平面或水平面;相对高度是指以雷达站高为零折算得到的目标所在位置高度,即绝对高度与雷达站高之差。
根据有无大气折射修正,目标高度可分为实际高度和视在高度。大气折射效应使得电磁波传播路径发生弯曲,目标视在高度是指雷达按照波束指向循直线确定的目标高度,包含了大气折射引入的高度偏差;实际高度则是目标相对于高度基准的实际值,与大气折射无关。

图2 目标高度计算示意图
通过大气折射效应修正,可由视在高度求解出实际高度。如图2所示,a为地球半径,R为目标距离测量值,为目标仰角测量值,Hradar为雷达站高度,则目标高度测量值为[7]
Htarget≈Rsinθ+R2/2a+Hradar
(1)
式中,若a取平均地球半径a0,则Htarget为视在高度;若a取为等效地球半径ae=ka0(k=4/3)则Htarget为实际高度;若Hradar取0(实际不为0),则Htarget为相对高度,否则为绝对高度。
下面分析雷达站球坐标(R,A,E)或混合坐标(R,A,H)与雷达站直角坐标(Xr,Yr,Zr)之间的转换方法。
若H为相对实际高度,则
Zr=H-R2/2a0
(2)
若H为相对视在高度,则
Zr=H+R2/2ae-R2/a0
(3)
若H为绝对实际高度,则
Zr=H-R2/2a0-Hradar
(4)
若H为绝对视在高度,则
Zr=H+R2/2ae-R2/a0-Hradar
(5)
雷达站直角坐标系下目标Xr与Yr值为
(6)
4 时戳格式
雷达情报时戳,表征了雷达探测到当前点迹的准确时刻,是融合点迹时间对准的最直接依据。雷达时戳来自于系统内时统设备,通常采用外部授时与内部守时相结合的机制。外部授时利用卫星授时系统或其它授时基站对雷达时统设备进行同步,内部守时利用时统设备进行同步间隔内的高精度守时。
雷达情报时戳具有相对时戳和绝对时戳两种形式。相对时戳在约定时间段内采用计数器形式表示,关键在于保证计数器时间范围无模糊且计数时间粒度满足要求,例如0~10000;绝对时戳采用标准时间格式表示,形式简单但数据量较大,例如9:10:25.125。通常情况下,经过合理设计的相对时戳是准确而高效的。

(7)
时戳无模糊范围主要考虑情报传输时间和融合时长。其中,情报传输时延是指情报从雷达录取设备到情报中心的传输时间,通常不大于1s;融合时长是指情报中心进行情报融合时选取的时间片长度,根据设备不同可能为数秒至数分钟量级。因此,时戳无模糊范围通常只需参考融合时长设计,若融合时长为ΔTfuse,则时戳计数范围应满足
N≥ΔTfuse/ΔT
(8)
此外,还要确定计数器0的定义,方法比较灵活。若以整点为计数零点,则时戳转换方式为
n=(M·6000+S·1000+m)mod(N)
(9)
其中,n为时戳计数,M为绝对时间“分”,S为绝对时间“秒”,m为绝对时间“毫秒”,N为时戳计数范围。
例如,某警戒雷达网参数为v=500m/s,ΔR=50m,k=5,ΔT=30ms,ΔTfuse=60s,则ΔT≤40ms,N≥1500。若取ΔT=30ms,N=3000,即时戳值为0~2999。若绝对时间为9:10:25.361,则时戳为n=1361。
5 定位格式
5.1 大地坐标系
目前,雷达定位采用的大地坐标系主要有WGS-84、BJS-54、CGCS-2000等。通常,定位设备输出格式为经L、纬B、高H,而雷达情报转换使用地心空间直角坐标(Xe,Ye,Ze),因此需进行格式转换,即
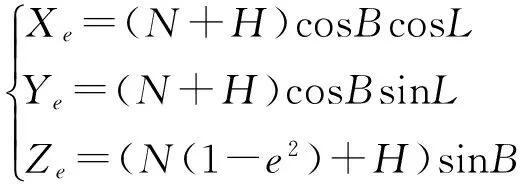
(10)
其中,a和b为大地坐标系采用的参考椭球长半轴和短半轴,其取值如表1所示。

表1 大地坐标系椭球参数表
由表1可见,CGCS-2000和WGS-84椭球参数相差很小,同一点的坐标差值小于1mm,因此工程上可忽略[8];BJS-54椭球参数差异较大,在情报格式转换时要选用正确参数[9]。
5.2 高程格式
根据定位设备的不同,定位输出数据采用的高程定义有所不同。高程定义包括正高、正常高和大地高,正高是地面某点通过该点铅垂线至大地水准面的距离,是个确定的物理量但无法精确求定;正常高以似大地水准面代替大地水准面,数值极接近正高,也成为“海拔高”;大地高是以参考椭球面为基准面的高程,与坐标系相关。大地高与正常高的差值为异常高程ξ,本质上为似大地水准面与参考椭球面之间的高差,可以分地域预先测定[10]。大地高H、正常高h和高程异常ξ三者之间的关系为
h=H+ξ
(11)
总之,无论采用何种大地坐标系,其推算出的正常高数值应是理论上相同,工程上相近的。在大地坐标系与地心空间直角坐标系转换中,应采用大地高,而避免误用正常高。
6 定北格式
雷达定北方法很多,例如基准目标校准、磁罗盘、陀螺罗盘等,不同设备输出的“北”有着磁北和真北的差别,工程上应该注意区分。
磁北是以大地磁场为基准的,为过地球上一点指向地球磁北极的方向。真北,又称正北,为过地球上一点指向地球地理北极的方向。地磁极与地理极相接近,但并不完全重合,通常用“磁偏角”来表示磁北和真北夹角。磁偏角在全球各地是不同的,其变化范围常常有几分到几度不等;即使在同一天内的同一地方,也常常会有几分的变化量。我国磁偏角一般情况下为2°~3°,最大可达6°。显然,磁偏角大小与雷达方位波束宽度相接近,定北得到的方位基准不同会严重破坏情报一致性。因此,组网雷达最好采用相同的定北设备,或者采取手段将目标情报方位校正到相同基准。
7 结语
组网雷达系统是以信息为中心的体系,其交互情报的正确表示和传输是很重要的。本文面向组网雷达情报共享需求,提出了雷达情报交互关键要素包括目标位置、时戳、定位、定北等,针对不同要素研究了不同格式差异及转换方法,能够直接指导组网雷达情报传递、转换和处理系统的设计和实现。
[1]余非,时银水,季治宝.雷达网指挥控制系统框架设计和关键技术研究[J].防空兵指挥学院学报,2011,28(4):58-60.
[2]李旭东.陆军防空雷达组网与指挥控制系统集成研究[J].现代雷达,2009,31(5):7-10.
[3]刘卫新,孔庆宝,付继宗,等.战场情报信息分发系统的研究与实现[J].火力与指挥控制,2012,37(增刊):121-123.
[4]樊海博.陆基雷达网络化改造技术研究[J].火控雷达技术,2006,35(3):35-39.
[5]石章松,刘忠,王航宇,等.目标跟踪与数据融合理论及方法[M].北京:国防工业出版社,2010.
[6]金宏斌,徐毓,董峰.雷达信息处理系统中的坐标变换问题研究[J].空军雷达学院,2003,17(3):54-56.
[7]Merrill I. Skolnik.南京电子技术研究所译.雷达手册(第三版)[M].北京:电子工业出版社,2010.
[7]Merrill I. Skolnik. Radar Handbook(Third Edition)[M]. Beijing: Publishing House of Electronics Industry,2010.
[8]魏子卿.2000中国大地坐标系及其与WGS84的比较[J].大地测量与地球动力学,2008,28(5):1-4.
[9]谭清华,曾祥新,张任.BJS54测绘成果到CGCS2000的转换方法应用[J].全球定位系统,2010,35(2):36-38.
[10]谢海峰,唐海波.GPS高程测量的探讨[J].广东科技,2009(206):189-191.
DesignandTransformationofIntelligenceExchangeFormatinRadarNet
HAN Wenbin LI Xiaoyan WANG Huabing GUO Jinliang
(Luoyang Electronic Equipment Testing Center, Luoyang 471003)
As the technologies of network, digitalization, informationization in radar develop continuously, the coherence of intelligence exchange in radar net is outstanding. Focusing on the intelligence share in radar net, the intelligence exchange frame is analyzed with the key elements, of which the different format definitions differentiate, and then the methods to select and transform the element format of every element are researched. The outcome can support to design and realize the equipments for intelligence transfer, transformation, process in radar net.
radar net, command and control, intelligence exchange, intelligence format
2013年10月12日,
:2013年11月25日
韩文彬,男,硕士,助理研究员,研究方向:雷达电子战仿真、试验与评估。
TN95DOI:10.3969/j.issn1672-9730.2014.04.033