一种防跌倒预警系统的研究与实现
2014-07-24李慧奇梁丁宁运琨张静赵国如中国科学院深圳先进技术研究院深圳58055
李慧奇梁 丁宁运琨张 静赵国如(中国科学院深圳先进技术研究院深圳58055)
2(深圳低成本健康重点实验室深圳518055)
一种防跌倒预警系统的研究与实现
李慧奇1,2梁 丁1,2宁运琨1,2张 静1,2赵国如1,2
1(中国科学院深圳先进技术研究院深圳518055)
2(深圳低成本健康重点实验室深圳518055)
跌倒是造成世界上意外伤害死亡的第二大原因,如何预防跌倒已成为保障老人生命的关键。目前常见“跌倒报警器”的传感模块一般采用单一的三轴加速度计,测量精度受限,仅能实现人体跌倒后的报警功能而不能实现跌倒前的预警。文章设计并实现了一种基于MEMS惯性传感单元的防跌倒预警器,率先设计了含“三轴加速度计+三轴陀螺仪+三轴磁力计”的高精度多模态传感模块,内嵌跌倒预警算法,并通过蜂鸣器和振动器警示。对九名健康年轻实验对象进行了总计81次的跌倒实验,系统结合基于阈值的跌倒预警算法,结果表明,其检测灵敏度可达98.61%且特异度为 98.61%,平均预警时间为300ms。未来研究将嵌入全球移动通信系统(Global System For Mobile,GSM)、全球定位系统(Global Positioning System, GPS)等电路模块功能及配备穿戴式安全气囊,有望在易跌人群中实现实时防护和及时救治。
跌倒预警;惯性传感单元;阈值算法
1 引 言
据统计,全世界每年有约24000人死于跌倒,跌倒已经成为意外伤害致死的第二大成因(仅次于交通事故)[1]。在这些与跌倒相关的死亡中,超过80%发生在中低等收入水平的国家,其中65岁以上的人居多[2]。跌倒事故中,老人往往要承担更严重的伤害甚至死亡风险,并且这种风险随年龄的增长而增加。随着全球老龄化问题的日益突出,解决跌倒问题显得愈发重要。
近年来,众多科研工作者提出了一些跌倒识别和预警的方法,主要包括基于视频检测技术、基于环境感知技术和基于可穿戴式传感技术三大类[3]。基于视频检测技术涉及到用户的隐私问题,而基于环境感知技术则在设备安装上比较麻烦[4,5]。因此,可穿戴式传感技术因其低成本、易用性和高性能等技术优势,成为较优选方案[3,6]。
市场上常见的“跌倒报警器”就应用了该技术,其中所用到的惯性传感器主要是加速度计和陀螺仪[7]。
目前常见“跌倒报警器”的传感模块一般采用单一的三轴加速度计,测量精度受限[8-10],且由于人体的日常行为活动非常复杂[11],因此仅能实现人体跌倒后的报警功能而不能实现跌倒前的预警[12-14]。本文设计并实现了一种基于MEMS惯性传感单元的防跌倒预警器,设计了含“三轴加速度计+三轴陀螺仪+三轴磁力计”的高精度多模态传感模块,内嵌跌倒预警算法,并通过蜂鸣器和振动器警示。
2 材料和方法
整套系统需要安装在人体身上,以实时监测跌倒预警所需要的运动特征参数,但不应影响人在活动时的正常动作,因此,设备应采用可穿戴式设计,体积也应尽量小以便于携带。在硬件构成上,除了上文提到的传感模块和报警模块外,还应该包含微处理器、电源模块、充电模块和存储模块等。在软件设计上,除了植入基于阈值的跌倒预警算法之外,还应充分考虑到数据采样率、实时处理和低功耗设计等。在对系统PCB板加工、焊接和调试成功并整体安装完毕后,还应做若干次典型的跌倒检测实验,才能充分验证该系统能够实现跌倒前的预警功能。
2.1 硬件设计
2.1.1 系统结构框图
在当前的设计中,硬件系统包括微控制器主板、传感单元板、聚合物锂电池及其他相关电路,系统的硬件结构框图如图1所示。

图1 系统结构框图Fig.1. Basic structure of the system
考虑到微控制器主板可以和其他的传感单元板相连接,以及方便传感单元板的升级换代,所以我们分别设计了这两块电路板,而不是把他们集成在同一块电路板上。再者,这种分板设计有利于传感单元板更好地贴近人体。因为从理论上来说,传感器越是接近测试对象,测量结果就越接近实际情况。另外,运动传感器对电磁噪声很敏感,把微控制器主板和传感单元板分开,也有利于提高系统的电磁兼容性能。
2.1.2 微控制器:MSP430F2418PM
市场上的跌倒报警器通常使用的微控制器主要有如下三种:ATMega128L、Silicon Labs C8051和MSP430。经深入调研后,我们采用了TI的MSP430F2418PM作为跌倒预警系统的微控制器。该主控制器功耗极低,含16位精简指令系统的CPU,并且可以根据实际需要灵活地选择合适的系统时钟,从而更合理地利用系统的电源,实现整个系统的超低功耗。低工作电压范围为:1.8V~3.6V,工作电流在待机模式下仅0.8uA,在运行模式下为0.25mA。内含标准的数字控制振荡器(DCO),从待机模式唤醒至运行模式耗时不足1秒。此外,MSP430F2418PM还提供了8KB的RAM、116KB的flash存储器、五种低功耗模式、两个16位的定时器、一个快速的12位A/D转换器、一个比较器和四个通用串行通讯接口模块,支持UART、I²C和SPI通信,片上的I/O引脚数多达64个[15]。
在跌倒预警系统中,3轴加速计、3轴陀螺仪、3轴磁力计、报警单元和存储模块等都是通过SPI通讯或其他的I/O端口由微控制器MSP430F2418PM来控制。
2.1.3 传感模块:MPU6000与MAG3110
用于人体运动捕捉的传感器的测量精度对跌倒预警检测非常重要。在前面章节部分中提到过,预警检测需要一个多模态和高精度的惯性传感器模块,对于传感器单元板的芯片解决方案,我们选用了InvenSense公司的内置三轴加速度和三轴陀螺仪的芯片MPU6000和飞思卡尔的三轴磁力计芯片MGA3110。
MPU6000是世界上首个六轴MEMS惯性运动测量组件,4mm×4mm×0.9mm的QFN超小封装结构,且功耗低、成本低、性能高,非常适用于智能手机、平板电脑和可穿戴式计算应用。MPU6000集成了9轴运动融合算法,结合内置的I²C总线,可以访问外部磁力计或其他传感器的数据,在不需要系统主控干预的情况下就可以通过MPU6000获取所有的传感器数据。为了能够精确地跟踪快速和慢速的动作,该芯片提供了±2g、±4g、±8g和±16g的加速度量程感知范围以及±250°/sec、±500°/sec、±1000°/sec和±2000°/sec角速度量程感知范围,用户可以通过配置相应寄存器来选择合适的量程[16]。除此之外,MPU6000还具有其他特点,包括:支持400KHz的快速I²C以及20MHz的SPI访问速率;可以承受10000g加速度的冲击;MPU6000内部还集成了一个温度传感器和在工作温度范围内变化幅度仅为±1%的片上振荡器[17]。
MAG3110是飞思卡尔公司推出的MEMS三轴磁力计,DFN超小封装(2mm×2mm×0.85mm),它具有体积小和功耗低的特点,结合三轴加速度计,可以产生精确的姿态角信息,MAG3110的灵敏度为0.1μT,量程范围为±1000μT,具有标准的I²C串行接口,支持最高通信频率为 400KHz的快速访问模式[18]。
2.1.4 其他相关模块
报警单元:当跌倒事件发生时,微控制器收到来自传感模块的信号,对信号进行判断后引发报警单元发出预警信号。报警单元包括一个微型的蜂鸣器和震动器。蜂鸣器的体积为5mm×5mm×1.8mm,驱动电压为3V,驱动电流为100mA,震荡频率为4000Hz,在10cm处的声压级(SPL)70dB/min。震动器选用一种直流有刷电机,驱动电压3V,驱动电流为70mA,体积仅为Φ8mm×2.7mm,转速高达12,000rpm,额定扭矩为10N·m。电源模块:为了匹配电路板较为特殊的结构,我们特意订做了一款可充电的聚合物锂电池。容量为240mAh,电压为3.7V,体积为25mm×25mm×12mm。电源模块中还集成了一个线性稳压芯片TPS71933-33,具有低噪声、低压差和3.3V双输出等特点,有效减免了模拟电和数字电之间可能造成的交叉干扰。充电模块:为了更高效和方便地利用锂电池,系统中集成了充电模块。它主要由一个MiniUSB和一个充电管理芯片BQ24080构成。Mini USB可以通过数据线从外电路获得电压和电流。BQ24080集成度高、灵活性好,可满足常规锂电池的充电需求。当锂电池的电压低于设定阈值时,它能够自动启动充电模式,当充满电或没有外接充电电源时则自动进入休眠状态。存储模块:内存较大的存储卡有利于数据的存储,从而更便于得到实际的跌倒预警时间。我们选择了一款普通的2G(或4G/8G等)TF卡,编程/擦除速度快,功耗低。
JTAG及扩展接口:JTAG接口能够方便MSP430仿真器从上位机往微控制器芯片中下载程序。扩展口多达20个,含8路模拟信号和4路数字I/O口、4路模拟或数字电及4路SPI口,可方便将来扩展GPS、GSM或其他电路模块。
2.1.5 抗干扰设计和实物电路板
在电路板的抗干扰设计上,除了把主控电路板和传感单元板独立设计以及模拟电路和数字电路独立供电外,我们还采取了其他抗干扰措施,比如我们选用了4层PCB板,把信号层设在顶层和底层,电源层和地层设在中间层,模拟地与数字地也尽量分开。在电源引脚处接一个10nF~100nF的小电容,在PCB板周围尽可能均匀分布一些4.7μF~10μF的大电容。在布线上,尽可能避免长距离的平行走线,在空间允许的情况下尽量增大线间距离和导线尤其是地线的宽度,使地线和电源线的走向与数据传递方向尽可能保持一致。
微控制器主板和传感单元板的PCB图如图2所示。

图2 微控制器主板和传感单元板的PCB图Fig.2. PCB of the MCU control board and the sensing units board
防跌倒预警系统的实物如图3所示:(a)为已经焊接完成的电路板实物照(体积为 27mm×27mm×13mm);(b)为已经组装好的产品照(体积为51mm×33mm×16mm)。

图3 防跌倒预警系统实物图Fig.3. Physical diagram of the early pre-impact fall alarm system
2.2 软件设计
系统上电后,首先要完成各个模块的初始化,然后一直执行基于阈值的跌倒预警算法,当系统判断出有跌倒倾向时,会触发报警电路工作,用户可以主动按下“取消报警”键,也可以主动按下“跌倒预警退出”键,否则程序会重新开始执行跌倒预警算法。关于跌倒预警算法在理论上的可实现性及阈值的最佳设定,前期工作中 Zhao 等[3]和Liang等[7]已经作了充分的论证,此处不再赘述。系统的软件主流程图如图4所示,图5则显示了代码已被成功下载到微控制器中。

图4 系统的软件主流程图Fig.4. Main fl owchart of the system software
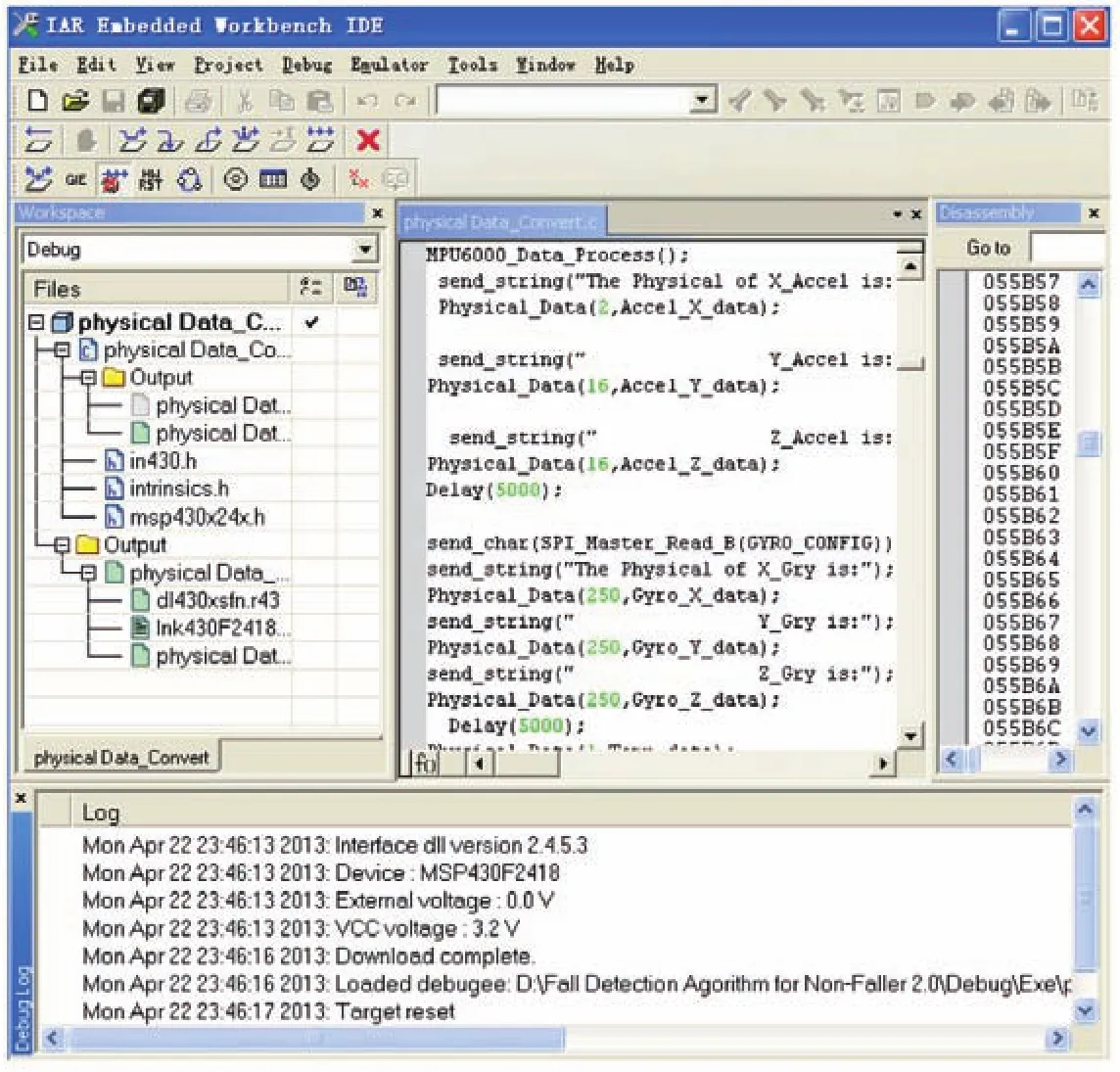
图5 代码成功下载进微控制器Fig.5. The code downloaded successfully to the MCU
另外,MSP430F2418M 往 MPU6000 和MAG3110 的寄存器写入控制数据和读取输出数据,数据采样率的设置、用中断来实现低功耗设计和基于阈值的跌倒倾向判定算法等,也都是通过软件编程实现的。
2.3 实验测试
根据对基于穿戴式惯性传感单元的防跌倒预警分析及相关研究结论,我们把人体腰部、胸部、小腿和大腿的运动学数据进行了对比,发现腰部是放置惯性传感器的最佳位置[3,7]。因此我们用自粘绷带和魔术胶带把防跌倒预警系统固定在志愿者的腰部。跌倒实验室以及系统在人体的固定位置如图6所示。

图6 跌倒实验室以及系统在人体的固定位置Fig.6. Laboratory for falling test and the system installation position on the human body
共选取9名健康年轻的成人志愿者(其中6男3女,年龄:24±3.5岁,体重:62±14.5kg,身高:170±12cm)参与了此次试验。参与者按要求完成一系列跌倒相关动作,实验过程包括校准1次,前倒、右倒和后倒各3次,因此在模拟跌倒环境中共进行了81次(不含校准)跌倒实验。同时我们采用了一台高速摄像机来记录跌倒预警时间(也可以从TF卡存储的数据中计算出该时间)。另外,该项实验已通过中国科学院CAS伦理委员会的批准,且所有参与者事先均知情并志愿参与。
3 结 论
需要指出的是,本跌倒预警系统中采用了卡尔曼滤波算法,所用到的高精度惯性传感单元(MPU6000和MAG3110)中包括一个3轴加速度计、一个3轴陀螺仪和一个3轴磁力计。被测对象的姿态角则可以经卡尔曼滤波后的9D信号计算获得,通过磁力计获得的数据可用来消除电磁干扰,因此可用它来校准3D加速度信号(Acc)和3D陀螺仪信号(Gyro)。根据之前相关的研究,我们已经证实了在基于冲击前相的跌倒检测算法中,以合加速度和姿态角作为特征量是最佳选择[3,7]。图7所示为Acc信号的分类结果,可以用来检测所有的加速度信号。当其阈值分别设定为3.0m/s2、4.0m/s2、4.5m/s2、5.0m/s2、5.5m/s2和6.0m/s2时,其对应的灵敏度和特异度也会随之变化,具体如表1所示。其相关的ROC曲线如图8所示,由此图可以看出,当Acc阈值设置为4.5m/s2时预警效果最好,其对应的灵敏度为98.61%,特异度为98.61%。

图7 依据失重过程的跌倒预警Fig.7. Early warning of fall based on the pre-impact phase

表1 不同阈值下的准确度评价(失重过程)Table1. Accuracy evaluation with different threshold values (pre-impact phase)

图8 各阈值下ROC曲线(失重过程)Fig.8. ROC curve with different threshold values (Pre-impact phase)
此外,根据之前采用两个阈值计算的跌倒预警研究中,其最佳阈值分别为 5 m/s2和25m/s2[3,7]。通过分析整个跌倒过程中的时间,即跌倒过程中达到第一阈值时的时间T0和第二阈值时的时间T01,两者相减即可得到其前置时间。对应的前置时间分布情况如图9所示,该算法下的前置时间平均在300ms左右。
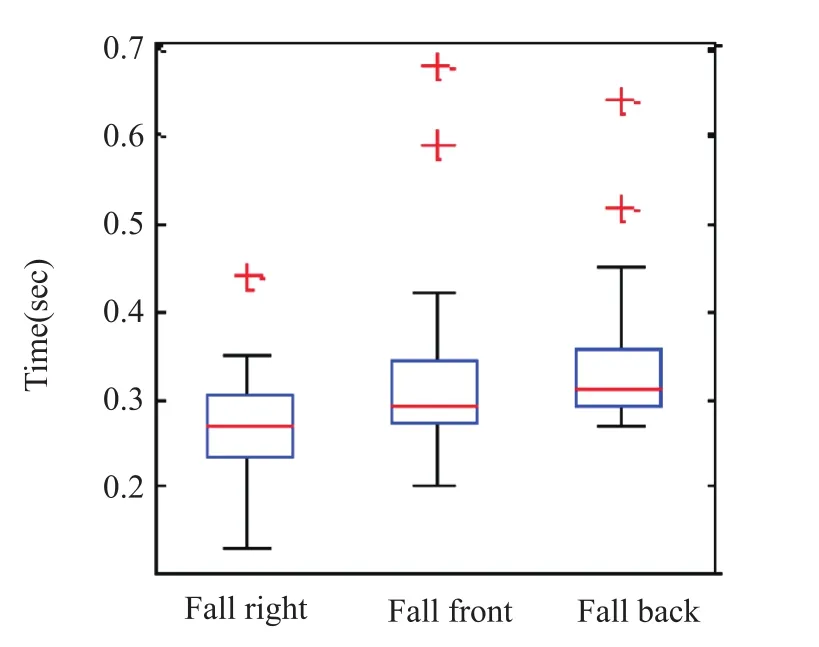
图9 跌到预警前置时间分布Fig.9. Lead time distribution for pre-impact warning
显然,跌倒预警时间越长,对跌倒防护越有利。我们考虑嵌入更好的惯性传感单元和更优化的跌倒预警算法,升级硬件配置、优化软件系统等方法来提高系统的性能。未来研究将嵌入GSM、GPS等电路模块功能及配备穿戴式安全气囊,希望在易跌人群中实现实时防护和及时救治。
4 总 结
根据理论上的可行性、算法的可实现性以及最佳阈值的设置,这种基于MEMS惯性传感单元的跌倒预警系统得以设计和实现。相关实验结果证明,该系统能够在模拟的跌倒事件中正常工作,尽管在灵敏度和特异度等方面仍有不完美之处。需要说明的是,所有的实验均由健康的年轻人参与,并且所有的跌倒动作都在具有缓冲作用的海绵垫上完成,这与老年人在真实情况下的跌倒有所不同。显然,最佳的实验方法是通过本系统内置的TF卡再辅以视频监测系统来记录老年人的日常行为活动,捕捉并记录下老年人偶然发生跌倒时的真实数据,尽管目前该方法实现起来有一定的难度,我们将继续优化实验方案,使该系统将来有机会得到更好的应用。
[1] World Health Organization. Falls. [EB/OL]. http:// www.who.int /mediacentre/factsheets/fs344/en/ index.html
[2] Loue S, Sajatovic M. Encyclopedia of Immigrant Health [M]. New York: Springer-Verlag New York Incorporation, 2012: 671-672.
[3] Zhao GR, Mei ZY, Liang D, et al. Exploration and implementation of a pre-impact fall recognition method based on an inertial body sensor network [J]. Sensors, 2012, 12(11): 15338-15355.
[4] Christensen HI, Phillips J. Empirical Evaluation Methods in Computer Vision [M]. Singapore: World Scientif i c Publishing Company, 2002.
[5] Doughty K, Cameron K. Primary and secondary sensing techniques for fall detection in the home [C] // Proceedings of Hospital without Walls, 1999: 104-116.
[6] Lin SC, Hsu HC, Lay YL, et al. Wearable device for real-time monitoring of human falls [J]. Measurement, 2007, 40 (10): 831-840.
[7] Liang D, Zhao GR, Guo YW, et al. Pre-impact & impact detection of falls using wireless body sensor network [C] // IEEE-EMBS International Conference on Biomedical and Health Informatics, 2012: 763-766.
[8] Chen J, Kwong K, Chang D, et al. Wearable sensors for reliable fall detection [C] // Proceedings of the 2005 IEEE Engineering in Medicine and Biology 27th Annual Conference, 2005, 4: 3551-3554.
[9] Zhang AH, Wang L. Tumble detection based on three-dimensional acceleration transducer [J]. Journal of Clinical Rehabilitative Tissue Engineering Research, 2010, 14(28): 9029-9032
[10] Bianchi F, Redmond SJ, Narayanan MR, et al. Barometric pressure and tri-axial accelerometrybased falls event detection [J]. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2010, 18(6): 619-627.
[11] Anania G, Tognetti A, Carbonaro N, et al. Development of a novel algorithm for human fall detection using wearable sensors [C] // Proceedings of IEEE Sensors, 2008, 2: 1336-1339.
[12] Bourke AK, Lyons GM. A threshold-based falldetection algorithm using a bi-axial gyroscope sensor [J]. Science Direct, Medical Engineering & Physics, 2008, 30(1): 84-90.
[13] Sun XX, Tang DF, Ma WM. Design of fall detector based on 3-axis accelerometer and CDMA [J]. Application Design, Electronic Technology, 2008, 45(3): 14-16.
[14] Bourke AK, van de Ven P, Gamble M, et al. Assessment of waist-worn tri-axial accelerometer based fall-detection algorithms using continuous unsupervised activities [C] // The 32nd Annual International Conference of the IEEE EMBS, 2010: 2782-2785.
[15] Texas Instruments. MSP430x2xx family user’s guide [EB/OL]. http://www.ti.com.cn.
[16] Invensense. MPU-6000 and MPU-6050 product specification revision 3.1 [EB/OL]. http://www. invensense.com/mems/gyro/sixaxis.html.
[17] Invensense. MPU-6000 and MPU-6050 register map and descriptions revision 4.0 [EB/OL]. http:// www.invensense.com/mems/gyro/sixaxis.html.
[18] Freescale. MAG3110: xtrinsic high accuracy 3D magnetometer [EB/OL]. http://www. freescale.com/webapp/sps/site/prod_summary. jsp?code=MAG3110&fsrch=1&sr=1.
The Study and Realization of an Early Pre-impact Fall Alarm System
LI Huiqi1,2LIANG Ding1,2NING Yunkun1,2ZHANG Jing1,2ZHAO Guoru1,2
1( Shenzhen Institutes of Advanced Technology, Chinese Academy of Sciences, Shenzhen 518055, China )
2( Shenzhen Key Laboratory for Low-cost Healthcare, Shenzhen 518055, China )
Falls are the second leading cause of unintentional injury deaths worldwide, so how to prevent falls has become a safety and security problem for elderly people. At present, because the sensing modules of most fall alarms generally only integrate the single 3-axis accelerometer, the measurement accuracy of sensing signals is limited. They can only achieve the alarm of post-fall detection but not the early pre-impact fall recognition in real fall applications. Therefore, an early preimpact fall alarm system based on high-precision inertial sensing units was studied and developed in this paper. A multimodality sensing module embedded with the fall detection algorithm was developed for the early pre-impact fall detection. The module included a 3-axis accelerometer, a 3-axis gyroscope and a 3-axis magnetometer, which could arouse early preimpact fall warnings by a buzzer and a vibrator. Total 81 times of fall experiments from 9 healthy subjects were conducted in simulated fall conditions. The result shows that the detection sensitivity of the system combining the early warning threshold algorithm can reach 98.61% with a specif i city of 98.61%, and the average pre-impact lead time is 300 ms. In the future, GPS, GSM electronic modules and wearable protected airbags will be embedded in the system, which will enhance real-time fall protections and timely treatments for the elderly people.
early fall alarm; inertial sensor; threshold algorithm
TP 273
A
2013-11-20
国家自然科学基金(51105359 及 61072031)、国家高技术研究发展计划(863计划)(2012AA02A604)、国家重点基础研究发展计划(973 计划)子课题(2010CB732606)。
李慧奇,硕士,研究助理,研究方向为人体跌倒预警与防护系统;梁丁,硕士,研究助理,研究方向为人体跌倒预警与防护系统;宁运琨,硕士研究生,研究方向为跌倒算法;张静,硕士研究生,研究方向为跌倒算法;赵国如(通讯作者),博士,副研究员,研究方向为人体运动功能评估、生物电子仿生技术与仿生医疗器械,E-mail:gr.zhao@siat.ac.cn。
