基于单片机的准直播种导引激光信号发射车的设计
2014-07-24齐晓娜刘阳崔保健
齐晓娜,刘阳,崔保健
(1.河北金融学院 信息管理与工程系,河北 保定 071051;2.河北农业大学 机电工程学院,河北 保定 071001)
在温室大棚的蔬菜种植中,要求行距协调一致,植株生长整齐,这样可以有效增加光照,进而提高蔬菜产量.目前国内保证播种或移栽的直线度和邻接行距的方法主要有:1)在农机具上安装划印器或侧对行器;2)开5 cm 深的机具行走沟;3)采用人工拉线划点的方法.以上方法,应用起来工序繁琐,增加了田间作业的劳动强度,同时受人为因素影响造成播行不直、行距误差大,影响播种作业质量[1]及蔬菜的后期管理.国外解决对行问题主要利用GPS和GIS技术,但GPS费用高,研究难度大,中国农户很难接受[2],温室内更不具备使用GPS的条件.激光以其直线传播,抗干扰能力强等优点主要应用到军事、工业AGV 设计中[3];在农业生产中激光平地技术及激光导航技术得到了不同程度的应用[4-5].本研究将激光导航技术应用到农机准直播种作业中,保证播种直线度、行距准确及行与行之间的平行度,可以减少驾驶员的劳动强度,消除累计误差[6].
1 激光导引信号发射车的总体设计
1.1 激光准直播种系统原理
激光准直播种系统由一台激光导引的激光发射车作为核心部件,如图1所示,激光发射器1固定,激光发射车沿激光发射器1提供的激光信号平面A 按照控制逻辑自动行进相应距离,并通过车载激光发射器2逐行为播种机提供相互平行的激光导引信号平面B,导引播种机直线行走.由此可见,激光导引信号发射车要完成的任务有
1)沿激光发射器1的激光信号平面A 直线行走,并且不受地面起伏的影响;
2)行进设定距离后即刻停止,保证播种机作业时往复行距均匀;
3)保证车载激光发射器2发出的激光信号平面与激光发射器1发出的激光信号平面垂直,进而确保每个提供给播种机的激光导引信号与平面B平行,播种的直线度及行与行的平行度才能得以保证.

图1 激光准直播种系统原理Fig.1 Schematic diagram of system
1.2 激光发射车的结构
激光发射车采用直流减速电机驱动的履带式底盘(即行走系),由前后2个接收器、车载激光发射器及其位置调整机构、主控制系统组成.激光导引信号发射车的结构模型如图2所示.

图2 激光发射车模型Fig.2 Model of laser guiding vehicle
1.3 激光发射车控制系统
主控系统以单片机STC12C5A60S2为控制核心,系统由无线接收模块、信号接收电路模块、行距输入及行进距离检测模块、电源系统模块、直线行走控制模块和车载激光发射器位置控制模块等电路组成,控制系统见图3.激光发射车的所有软件程序都采用C51在keil3下开发.

图3 控制系统原理Fig.3 Schematic diagram of control system
2 激光发射车控制系统的关键模块设计
2.1 激光发射器的选择
本系统中采用2个激光发射器,为了保证在田间作业有上下起伏时,也不影响激光信号的接收,激光发射器必须能够发射铅垂平面,另外激光信号的工作距离是主要考虑因素.经过对比国内外多种激光发射器的主要性能指标、价格等因素,激光发射器1选择福田激光水平仪EK-155AP作为激光控制系统的激光信号源.此设备能够发射水平激光面和垂直面,可自动调平,红光波段波长635nm,工作半径在50m 以上.车载激光发射器选用波长为850nm 的一字激光发射器,发射功率30mW,激光的有效接收距离大于150m.
2.2 激光接收装置设计
在激光导引发射车前后各安装1个激光接受器,安装位置如图2中前接收器和后接收器.激光接收器可以实时接收微弱低频的激光束信号,经过处理电路处理后,传送位置信号给控制器.
激光接收器传感器由2片硅光电池(20mm×10mm)水平横向排列,信号处理电路包括前置放大电路、整形电路、脉冲展宽电路等.输出3种状态:左硅光电池接收信号、右硅光电池接收信号和2片硅光电池同时接收信号即激光信号在接收器中间.
2.3 激光发射车直线行走的设计
控制发射车直线行走机构由前端激光接收器、主控器、直流电机控制器和2个减速直流电机及行走系组成.其中主控制器控制直流电机运行,采用STC12C5A60S2自带PWM 功能,通过设置单片机的CCAP0H寄存器的值输出不同的PWM 占空比,来改变电机允许速度.直流电机控制器驱动芯片采用飞思卡尔的MC33886,输出电流最大可以达到5A,可以实现电机PWM 调速、正反转、制动等实时控制功能.电路设计考虑了过流、欠压和温度过高的自动保护,并采用光电耦合隔离设计,增强了抗干扰能力.
直线行走的设计原理:激光导引信号发射车上的2个直流电机分饰不同角色.左侧直流电机在工作时,恒定速度运行.行进距离检测电路安装在左侧驱动轮上监测行进距离,当行进距离到达时2个电机同时制动.右侧直流电机通过速度调节,实现发射车的左右转向和直线前进.发射车前端的激光接收器为发射车提供直线行走,左转,右转输入信号.当激光导引信号照射在接收器正中时,右侧直流电机保持与左侧直流电机同速,激光发射车沿激光导引信号直行;当信号照射在接收器左侧时,说明小车偏右,控制器调整PWM 占空比,以控制右侧电机加速,小车左转,直到导引信号回到正中;当导引信号照射在接收器右侧,说明小车偏左,控制器改变PWM 占空比控制电机减速,小车右转,直到激光信号回到接收器中间位置,实现激光发射车沿激光导向信号直线行走.
2.4 行距输入和测量
2.4.1 行距参数输入
由于农机设备不同以及激光接收器在播种机上的安装位置不同,播种偶数播幅和播种单数播幅时,激光发射车行进距离不同.
偶数播幅时激光发射车行进距离[7]

播种单数播幅时激光发射车行进距离[7]

公式中,a表示农机具的幅宽;b表示机组往复行距;c表示接收器的位置到第1个播幅的距离.
行进距离参数的输入方式采用“智能手机+蓝牙串口模块+主控器”模式.目前智能手机已经很普遍,而且都具有蓝牙通信功能,通过手机蓝牙功能与蓝牙串口模块建立无线通信,进行参数传输.系统中蓝牙串口模块核心使用HC-06从模块,它可以直接与单片机相连,取代串口通信,简化电路.
2.4.2 行进距离测量
采用霍尔传感器3144和磁钢监测行进距离,将其安装在驱动轮上,通过P3.2口将脉冲信息输入单片机.事先测量驱动轮的直径计算周长,将行进距离设定值除以驱动轮周长即可得出需要记录的脉冲个数.在主控程序中通过单片机的外部计数器功能,记录脉冲个数,当达到设定值时主程序中断,使激光发射车制动.
2.5 车载激光发射器的位置微调系统
发射车行进设定距离后立即停止,此时小车的位置不能确定,经测试停止位置不会偏离导引信号平面A太远,可以微调车载发射器的位置,使其发出的导引信号平面B与导引信号平面A 垂直.位置调整机构由前后2个接收器、倒T 型支架、2个带有滑台的步进电机、激光发射器2组成.结构参考图2.
为了减少主控器的负担,步进电机的控制采用独立控制器,主控器只负责发送启动信号,而不直接控制步进电机.步进电机的控制芯片采用STC15F201EA,增强型8051cpu,1T,单时钟/机器周期比普通8051快6~12倍.内部集成高精度R/C时钟,5~35 MHz宽范围可设置,不需要外部晶振.步进电机驱动芯片采用L293.
微调原理:当激光发射车停止后,控制器判断激光导引信号平面A 落到前端接受器和后端接收器的位置,先后控制前后步进电机带动前端接收器和后端接收器左移或右移,直到激光导引信号平面A 同时落在2个接受器中间,即刻停止.经过双向调整后,倒T 型支架横梁与激光发射器1发射的信号重合,则车载激光发射器2的激光信号平面与激光发射器1的信号平面垂直,保证车载激光发射器每次为播种机提供的导引信号平面是平行的.
3 实验及分析
为了验证装置的准直效果,利用设计的实验平台进行了播种实验.播种实验在保定徐水县某蔬菜温室大棚(10m×90m)中进行,通过实验计算在此导引信号发射车的配合下,播种播向直线度和机组往复行距误差值.播种机采用韩国播兰特JAS-502B播种机播芹菜种子,播种机幅宽60cm,接收器的安装位置到第1个播种器的距离5cm,设定机组往复间距20cm.经计算播种单数播幅时,信号发射车移动距离为10cm,播种偶数播幅时信号发射车移动距离为150cm.
播种后,在播种行上任意抽取点为起始点,沿播向方向测50m,每5m 标注1个测点,获测点坐标,如数据表1;应用最小二乘法拟合播种行直线方程,以拟合直线作为测量基准线,表2为播种行的拟合直线方程.依据DB23/T470-1997《农业机械田间作业质量标准》中对播种直线度误差和行距误差计算方法的描述,通过测点与基准线来计算直线度误差和机具往复行距误差.经计算得出每50m 播向直线度误差为±4.9mm;机组往复行距误差为±7.8mm.
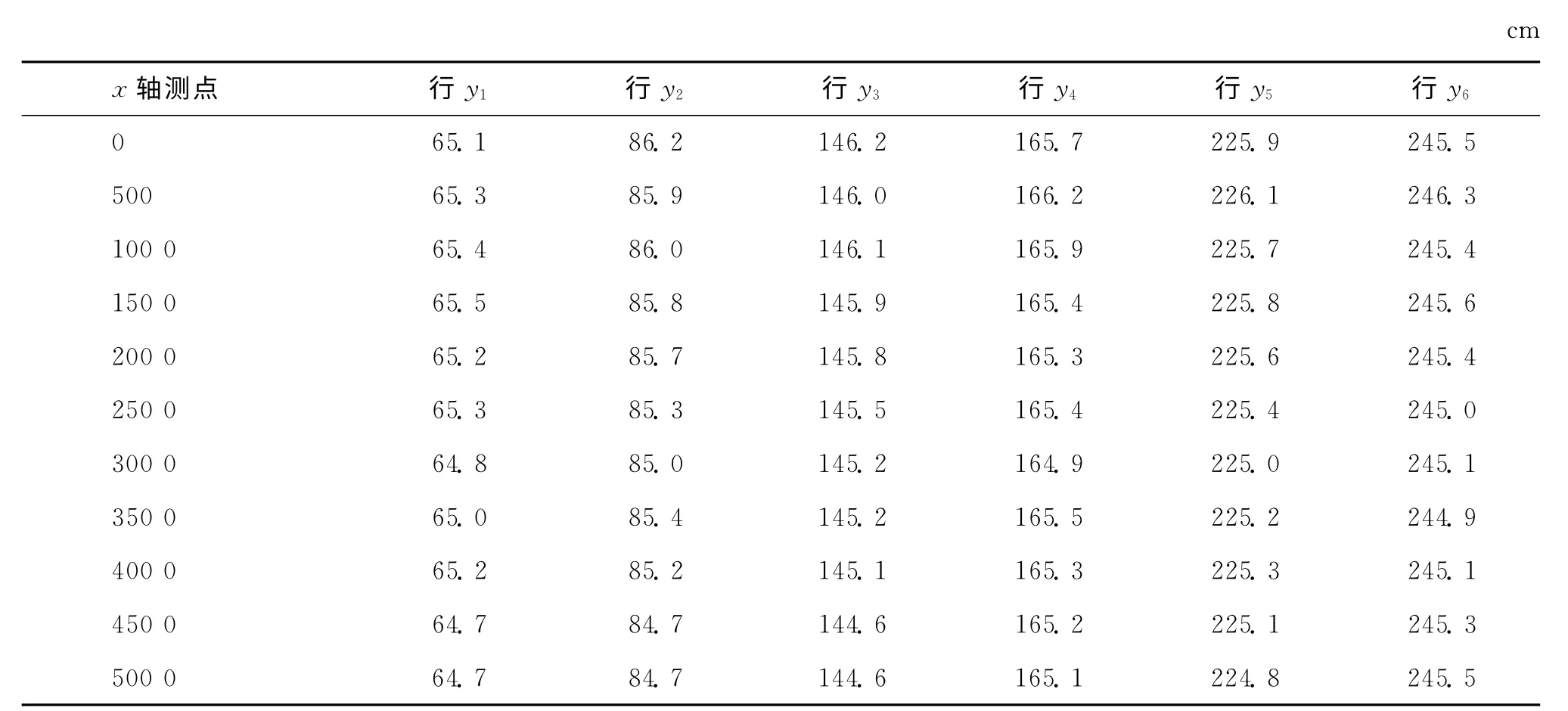
表1 地块内测点坐标Tab.1 Coordinate of monitoring point in seed rows

表2 拟合直线方程Tab.2 Fitting line equation
4 结论
研发了一种性价比高的准直播种导引激光信号发射车,该装置由STC12C5A60S2单片机作为主控制器,对装置硬件和软件进行了设计与实现.实验结果表明,本信号发射车行走稳定,发射信号平行度精确,在此激光信号发射车的配合下,准直播种系统每50 m 播向直线度误差为±4.9 mm,机组往复行距误差为±7.8mm,完全满足农业田间播种质量要求,显著优于人工操作,而且有效提高了驾驶员的操控能力.
[1] 马卫星.农机作业质量管理须引起重视[J].农机科技推广,2011(8):48-49.
[2] 李强,李永奎.我国农业机械GPS导航技术的发展[J].农机化研究,2009,31(8):242-244.LI Qiang,LI Yongkui.The GPS-navigation technology of farm machine in China[J].Journal of Agricultural Mechanization Research,2009,31(8):242-244.
[3] 肖鹏,栾贻青,郭锐,等.变电站智能巡检机器人激光导航系统研究[J].自动化与仪表,2012(5):5-9.XIAO Peng,LUAN Yiqing,GUO Rui,et al.Research of the laser navigation system for the intelligent patrol robot[J].Automation and Instrumentation,2012(5):5-9.
[4] 谢幸福,刘刚,郎晓哲,等.激光控制平地系统激光接收器设计与试验[J].农业机械学报,2009,40(S1):77-81.XIE Xingfu,LIU Gang,LANG Xiaozhe,et al.Laser receiver used for laser-controlled land leveling system[J].Transactions of the Chinese Society for Agricultural Machinery,2009,40(S1):77-81.
[5] 刘沛,陈军,张明颖.基于激光导航的果园拖拉机自动控制系统[J].农业工程学报,2011,27(3):196-199.LIU Pei,CHEN Jun,ZHANG Mingying.Automatic control system of orchard tractor based on laser navigation[J].Transactions of the CSAE,2011,27(3):196-199.
[6] 刘建.田间作业机组激光导向系统设计[D].泰安:山东农业大学,2011.LIU Jian.Design on laser guidance system for field machinery[D].Taian:Shandong Agricultural University,2011.
[7] 齐晓娜,姜海勇,李倩.农用激光导航无线遥控准直控制系统设计[J].农机化研究,2013,35(10):99-102.QI Xiaona,JIANG Haiyong,LI Qian.Design of collimation system for field machinery based on laser navigation and remote control technology[J].Journal of Agricultural Mechanization Research,2013,35(10):99-102.
