船舶安全航行系统风险分级ANFIS模型
2014-07-23夏海波张蒙蒙胡甚平黄常海
夏海波,张蒙蒙,胡甚平,黄常海
(上海海事大学 商船学院,上海 201306)
0 引言
作为船舶交通管理系统和船舶安全管理决策的根基,在航船舶风险评价一直是船舶交通安全领域的主要问题.许多专家从不同角度、针对不同因素对船舶及其环境进行风险评估和预防控制方面的研究[1],包括对人员、船舶、环境及管理等4大因素进行专项或组合研究,并提出许多评估风险的方法.
很多理论组合和评价方法被应用在船舶安全评价中.风险评估研究呈观两个阶段的发展.阶段一,侧重船舶静态风险因素分析.文献[2]通过将各因素内部细分并且模糊化,利用模糊综合评价法求得风险值,以实现风险评价.文献[3]将层次分析法与模糊综合评价法相结合,建立船舶状态层次模糊综合评估模型,使风险评估更有科学性.文献[4]对影响在航船舶安全的指标进行分析,给出船舶风险预先控制方案及船舶风险控制流程.阶段二,侧重船舶动态风险因素分析.文献[5]通过模糊推理系统对单船在航动态风险进行研究,对各因素隶属度进行划分,得到定量的评估风险.文献[6]将反向传播(BackPropagation,BP)神经网络引入船舶风险评价中,建立基于BP神经网络学习性的船舶风险评价模型,弥补当前船舶风险定量评价中主观性太强的不足.
模糊推理系统自学习功能、知识获取能力和自适应能力比较差,因此模糊推理系统的设计即使不依赖对象的实际模型,也需要在很大程度上依靠专家经验和统计分析.若这样的经验或调查结果缺失,则很难期望可以获得满意的风险模型结果.[7]而神经网络存在难以表达模糊语言的不足,缺少透明度,因此很难很好地表达人脑的推理功能.自适应网络模糊推理系统(Adaptive Network-based Fuzzy Inference System,ANFIS)[8-10]可将二者有机结合,既能发挥两者的优点,又可弥补各自的不足.
为此,提出基于模糊神经网络的对影响船舶安全的多因素进行风险评价的方法.将模糊推理系统的隶属性分析与神经网络的学习性相结合,充分利用历史数据或即时更新数据对在航船舶进行风险评估,通过数据训练修正各因素隶属度函数的参数,从而有效消除模糊系统的主观因素影响,并可以利用历史数据的及时更新,实现船舶风险的动态评估.
1 ANFIS的自适应算法
ANFIS是一种基于T-S模型的模糊推理系统,可由大量已知的典型数据的自适应学习修正相匹配的隶属度函数.ANFIS的结构是一个分层前馈网络,各因素层之间的连接权值可经过给定的样本数据进行自适应修正.因此,训练后所得的结构能较全面完整地反映实际系统的模型.参数学习采用混合学习算法,以提高网络的训练速率.其中,混合学习算法是在原有BP算法的原则上增加最小二乘法的一种算法,即网络的各通道上各个节点均可向前输出,并用最小二乘法辨识所得系统的参数;反向通道则充分地利用BP算法变更系统的隶属度参数.
以两输入网络结构为例(见图1),图中x1,x2为该网络的输入,y为输出.O1,i表示第1层第i个节点的输出.

图1 ANFIS结构
第1层 模糊化输入参数.

式中:x1为节点1和2的输入;x2为节点3和4的输入;O1,i(i=1,2,3,4)分别为因素选项 A1,A2,B1和B2的隶属度函数值,即第1层对应节点的输出;μAi(x1)(i=1,2)和 μBi-2(x2)(i=3,4)分别为 x1和x2的隶属度函数.本系统中一般选用高斯和钟形隶属度函数,其中高斯隶属度函数定义为

式中:参数ai,ci为高斯型函数的参数,决定该隶属度函数的形状.
第2层 模糊规则的可信度ω的计算.输出每条规则的可信度,即模糊推理的“AND”运算,常用求积进行运算,可表示为

第3层 归一化各条规则可信度.可以将第i条规则的可信度除以各规则可信度之和进行归一化.

第4层 每个规则输出的计算.

式中:pi,qi,ri表示对应节点的参数;fi表示 Sugeno型模糊推理系统的输出函数,包括为线性函数的“一阶系统”和为常量的“零阶系统”.
第5层 计算最终输出.

在训练过程中,ANFIS动态调整网络所包含的初设隶属度函数参数 ai,ci和计算参数 pi,qi,ri,以实现所设各参数的自适应学习,从而使网络达到更加准确地描述输入与输出数据间映射关系的效果.
2 船舶航行系统风险分级模型
2.1 风险因素识别及其评价模型
对在航船舶可能存在的所有风险因素进行识别,并将其细化,再分析各因素间的关联.这一全面考虑的过程称为风险识别.影响船舶风险的因素是随时间、环境持续变更的,因此对船舶进行详细风险识别不仅要考虑与船舶安全相关的静态风险因素,还要综合考虑气象、水文、交通流等众多动态因素以及航道宽度、航道弯曲度等随船舶位置的移动而相应变化的因素.
通过对资料的查阅、实际情况的调研、专家意见的咨询,在航船舶的风险因素可分为动态和静态风险因素2大类,在此基础上又细分为人员、船舶、环境和管理等4个主要因素.[11-13]图2为其模型图.

图2 船舶安全风险因素模型
影响因素中,管理因素与其他3个因素息息相关,较难精确地建立其隶属度模型,故在此仅以人员、船舶、环境等3个因素为分析起点,依次分层次细分后得到在航船舶风险因素全概图,见图3.

图3 船舶安全风险因素全概图
2.2 单影响因素ANFIS模型
根据已设计的风险因素全概图及评估系统模型,利用MATLAB的模糊推理系统[14]构建各层级单因素风险评估系统,并依次递进得到总体推理系统.下面以I-II级人员-船舶-环境结构为例进行阐述.
步骤1 确定输入、输出变量的分量.输入变量包括人员、船舶、环境风险值,根据专家分析,分别用低、中等、高表示,范围分别为0~100;输出量使用常量,由0~100的27个分量组成.
步骤2 确定各分量的隶属度函数.确定隶属度函数的类型和形状参数.ANFIS中非线性隶属度函数比线性隶属度函数拟合性更好,因此3个因素的隶属度函数均选择高斯型隶属度函数(GAUSSMF).图4为构建的隶属度图和结构图.

图4 隶属度函数
隶属度函数为常数函数,其结构:输入为人员、船舶、环境等3个因素,输出为风险值.
步骤3 确定合理的模糊规则.此ANFIS都包含3个输入变量、1个输出变量,根据专家经验和相关统计分析确定模糊规则.输出量的范围为0~100,分为27个量.本文中ANFIS包含27(3×3×3)条规则.
步骤4 观察模糊推理过程中输入变量与输出变量间的关系.分析各单指标模糊推理系统的性能,并综合考虑各系统的连接.
2.3 ANFIS系统的拓扑结构
整个船舶风险评估系统是由相互连接的单个评估指标的ANFIS组成的分层次网络结构,网络中从原始值开始依次与其较高层相连,得到若干ANFIS相连图.图5为航行环境评估网络拓扑结构.其中,由航道宽度等为输入,得出航道条件为输出的第三级ANFIS,而后依次上推,直至得到综合评估ANFIS.一个分量的作用既是ANFIS的低层次输出,同时是其相邻较高层ANFIS的输入.

图5 航行环境评估网络拓扑结构
3 算例
3.1 数据来源
数据获取:根据文献[4]中得到的船舶各参数模拟出的结果,选择覆盖全局、符合实际的典型风险集作为历史数据,其范围分布见图6,其部分数据见表1.
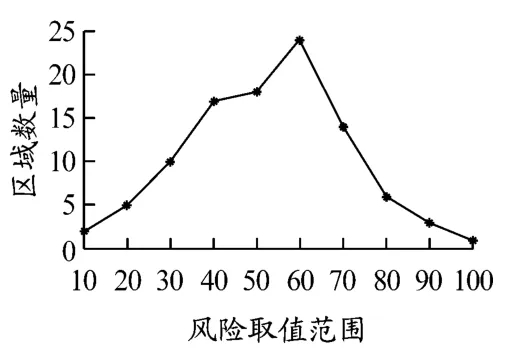
图6 训练数据分布
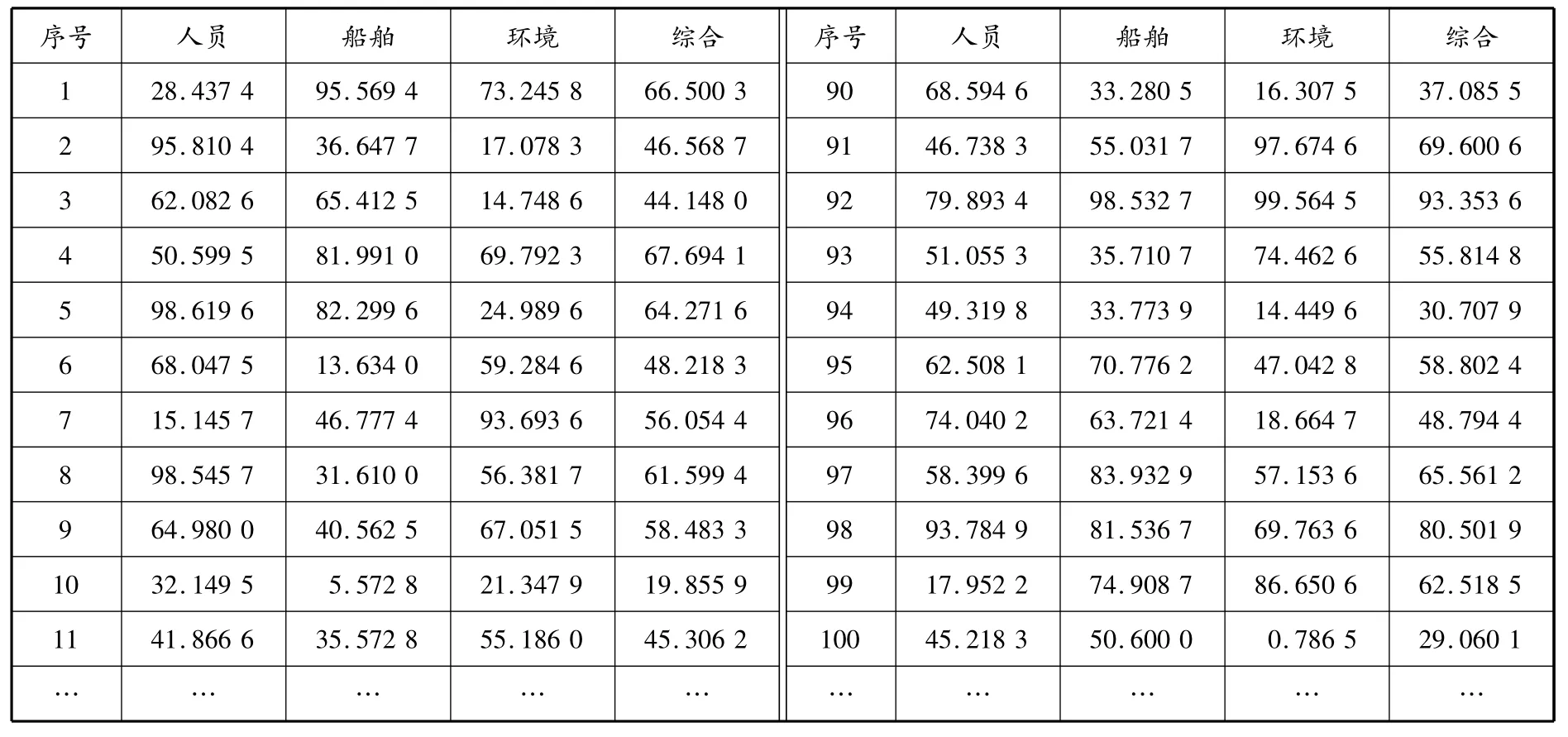
表1 历史数据
数据预处理:本数据表需要3个数据库,即训练、测试和验证数据库.故将上述获取的历史数据分成 3 部分:TrainData,TestData,ValidationData,以实现数据的完备及训练后后续步骤的有效进行.
3.2 确定ANFIS结构
根据训练数据的特点及结构规则,初步确定ANFIS的结构和隶属度函数原型.其结构从左至右,依次生成3个输入节点,每个节点的隶属度为3,共27条规则.
3.3 风险分级系统自修正训练
上文对影响船舶安全等级的风险因素进行分析,并利用模糊推理系统初步构建船舶风险评估模型,按照建立的模型和获取的船舶在航历史数据库,在MATLAB平台上应用数据的自学习性对数据进行学习,对模型的相关参数进行自修正,并利用训练好的数据对船舶风险进行评估论证.
(1)训练误差.利用训练集对ANFIS的初始结构和参数采用混合学习算法进行训练.船舶风险误差相对来说容差比较大,故本实验的误差阈值(Error Tolerance)设为0.500 0.导入上述给定的训练数据,并进行网络训练,最后得出训练误差(见图7)及平均误差.由图7可以看出,平均训练误差为0.502 6.

图7 训练误差
(2)训练后的各隶属度参数对比.训练后的隶属度函数见图8.当数据训练达到误差允许后,各输入变量的分量参数也训练完成,此时参数变化的前后对比见表2.
(3)检测网络.网络训练完成后,仅表示给出的初始数据已用非线性函数表示,而其普适性仍需检测数据及实时更新数据对网络进行检测并完善,直至误差始终处于指定范围之内.
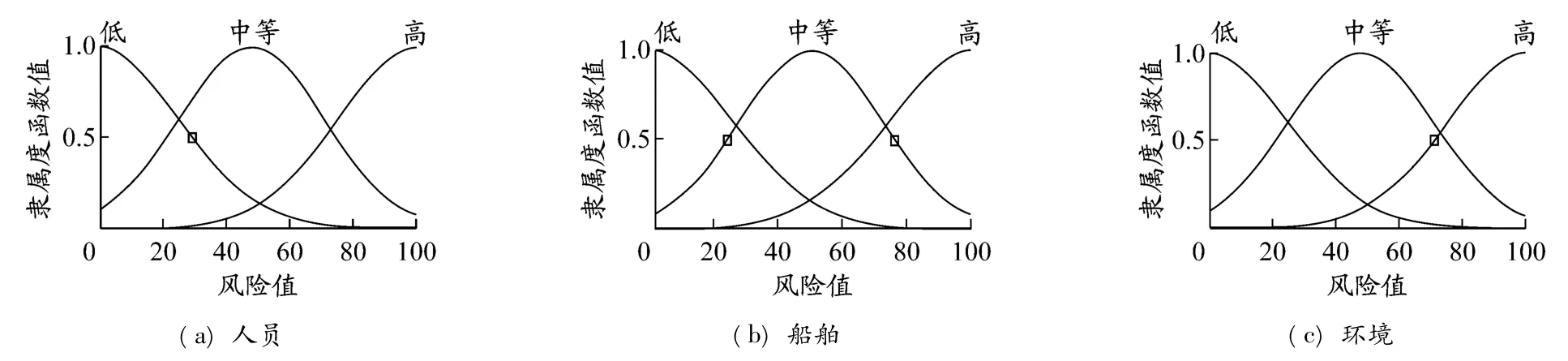
图8 训练后的隶属度函数

表2 参数变化对比
3.4 仿真结果验证
将随机指定的200组测试集样本载入训练完毕的ANFIS网络,进行风险评估网络结果的随机检测,结果见图9.
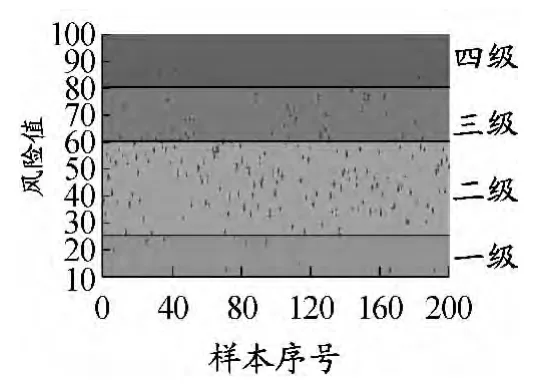
图9 测试结果
通过计算得出200组验证数据的平均风险误差为1.153 0.由图9可见,有135组位于图中的二级区域(即范围为25~60),占所有验证数据的67.5%,匹配度比较完好并且符合实际情况,具有普适性.
与基于传统FIS算法的风险评估结果相比,精度和灵敏度都提高11%,实现原有算法和模型的改进.
4 结论
本文综合考虑影响船舶安全航行的静态、动态风险因素,引入处理不确定性信息模糊性和自学习性的ANFIS,并基于ANFIS提出船舶安全航行风险的分级模型.主要结论:(1)ANFIS结合模糊逻辑、神经网络的优点,不仅能根据样本数据的特征修正网络结构,而且具有容错性的自学习功能,在风险定量化测度研究方面具有较强的适用性;(2)实例证明,基于T-S模型的ANFIS模型能够合理地根据历史样本数据评估在航船舶的系统风险,克服以往研究中主观性较强的缺陷.
该模型的合理性在一定程度上依赖于系统信息的大数据性,如何实时地将最新信息用于系统再学习,如何体现系统中人员、船舶、环境之间的关联性,是需要进一步研究的问题.
[1]HU Shenping,FANG Quangen,XIA Haibo,et al.Formal safety assessment based on relative risk model in ship navigation[J].Reliability Eng &Syst Safety,2007,92(3):369-377.
[2]刘元丰,唐兴莉.基于模糊综合评判方法的船舶航行安全评价[J].重庆交通学院学报,2004(3):123-126.
[3]郑士君,韩成敏,董建华.船舶状态综合评估模型的建立[J].中国航海,2008,31(2):144-147,157.
[4]段爱媛,赵耀.航行船舶安全状况风险预先控制方法研究[J].船海工程,2006,35(6):124-126.
[5]黄常海,胡甚平,郝严斌,等.单船动态风险评估模糊推理系统的设计与模拟[J].中国航海,2011,34(2):68-73.
[6]鲍君忠,刘正江,黄通涵.船舶风险评价模型[J].大连海事大学学报,2010,36(4):11-13.
[7]贾文娜,贾文娟.模糊推理的研究现状及应用[J].科技信息:学术研究,2008(6):320-322.
[8]顾秀萍.自适应神经模糊推理系统(ANFIS)及其仿真[J].火力与指挥控制,2010(2):48-49.
[9]张小娟.自适应神经模糊推理系统(ANFIS)及其仿真[J].电子设计工程,2012,20(5):11-13.
[10]朱广宇,刘克,乔梁.基于T-S模型的交通状态自适应神经模糊推理系统建模与仿真[J].北京交通大学学报,2012(6):96-101.
[11]胡甚平,方泉根,乔归民,等.大型船舶航行的风险分析与风险控制[J].中国航海,2006,29(3):34-38.
[12]刘大刚,郑中义,吴兆麟.大风浪中航行船舶风险体系分析[J].交通运输工程学报,2004(2):100-102.
[13]BALMAT J,LAFONT F,MAIFRET R,et al.Maritime Risk Assessment(MARISA),a fuzzy approach to define an individual ship risk factor[J].Ocean Eng,2009,36(15/16):1278-1286.
[14]石辛民,郝整清.模糊控制及其MATLAB仿真[M].北京:清华大学出版社,2008:126-143.
