基于静态传感器位置误差的TDOA源定位
2014-07-20高红艳
高红艳
(宝鸡文理学院物理与信息技术系,陕西 宝鸡 721016)
基于静态传感器位置误差的TDOA源定位
高红艳
(宝鸡文理学院物理与信息技术系,陕西 宝鸡 721016)
从目前静态传感器的随机误差角度研究了使用到达的时间差异来进行的源定位。开发一个约束加权最小二乘源定位方法,它合并源位置和辅助变量之间的关系作为一种约束。CWLS源定位被表达成一个无限的二次约束优化问题,这是一个非凸问题。通过使用隐藏凸性的原始优化问题,能有效地获得目标优化源定位估计。模拟证明有良好的性能。
源定位;到达的时间差异;加权最小二乘法;非凸问题;约束加权最小二乘法
0 引 言
源定位在信号处理领域受到广泛的关注,因为其在目标跟踪、无线通信和传感器网络等领域有重要应用[1-2]。在这篇文章中,我们通过被动的静态传感器网络来考虑源定位。现在有很多基于源定位的TDOA方法,基于Taylor系列线性扩张的非线性最小二乘法[3],它是通过迭代方式获取的,还有封闭解,它使得TDOA非线性方程变成线性方程,加入一个依赖源定位的辅助变量。这种重组的想法是最初在文献[4]中提出,在文献[5-7]中改进,用未知源位置和辅助变量之间的关系来更好的取得定位。
然而,上述方法都是基于传感器位置精确确定的假设。在实际中,传感器位置不可能精确地确定,这种现象已经成为研究定位问题的障碍了[8-10]。文献[8]详细阐述了甚至一个很小的传感器位置误差都会引起很大的源定位误差。在这篇论文中,我们考虑源定位和辅助变量之间的关系在加权最小二乘法优化问题中作为二阶等式约束,以此在目前的随机传感器位置误差源定位中提高精度。然而在合适的同时对角化的假设下,由于隐藏的凸性这个优化问题可以转化成一个凸极小化问题。我们验证了当传感器数量5以上时同步对角化的假设的效果很好。在实际的3维空间源定位中至少要4个传感器,所以上述条件很容易满足。文章剩下的部分安排如下,第一部分制定了定位问题,介绍了一些符号和标志的使用。第二部分介绍了中心限制的加权最小二乘法源定位。第三部分包含一些仿真结果来支持我们的理论研究。第四部分是结论。
1 问题的定义
在一个被动传感器网络中一个未知位置的源u=[x,y,z]′,n个传感器的位置为,i=1,2…n,它们从源位置抓取信号。然而真实的传感器位置s0i是未知的,都是含有噪声的si=[xi,yi,zi],在这:

Δsi是si的位置误差,收集的传感器位置为s=s0+Δs,此处s=[s′1,s′2,…,s′n],相应的误差矢量Δs=[Δs′1,Δs′2,…,Δs′n],它被假设成0均值高斯协方差Qs,假设视距信号传播,TDOA在相关传感器接收到的信号希望是可用的。让第一个传感器相关,TDOA的测量模型被给出如下:

ti1是传感器i和1之间的TDOA估计,t0i1是真实的TDOA,Δt是零均值高斯噪声协方差Qt。TDOA的测量值可以很容易地转换为差异到达的范围(RDOA)测量值,模型如下:

从源到真实位置之间的距离和可用的i传感器位置定义如下:

收集的ri1形成一个(n-1)×1测量值向量如下:r=[r21,r31,…,rn1],在这篇文章中TDOA和RDOA可以交互使用。
传感器位置噪声Δs假定和TDOA的噪声Δt彼此是独立的,对于一个静态传感器网络,给出了TDOA测量值噪声r和传感器位置噪声s,本文所提的方法会使得源定位u尽可能的精确。
2 约束加权最小二乘法源定位
在这里我们研究一种中心约束加权最小二乘源定位方法。通过弛豫过程利用u和r1之间暗含的关系,比较加权最小二乘法封闭源定位方法的两个阶段[5,8-9]。该方法通过合并u和辅助变量的关系作为一个二阶等式约束来处理加权最小二乘法的估计。不用考虑传感器位置的不确定性和加权矩阵的优化,需要找出一个6阶多项式根。我们将通过凸优化有效解决约束最小二乘法的估计。
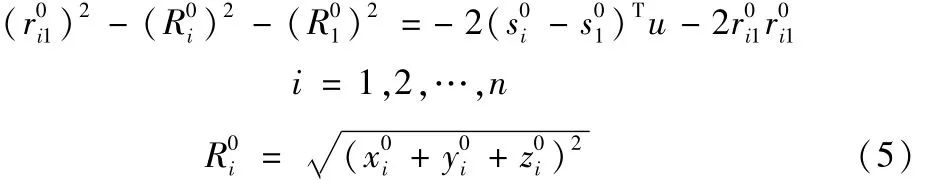
公式(5)是关于u和r0i的线性方程,确切的说r0i是未知源和传感器1之间的真实距离,它不依赖s01,这样我们就可以在噪声传感器位置S1使用Taylor扩展把r01扩展成一个线性误差项r01=,公式(5)被重新写成:

方程误差矢量ε被写成:

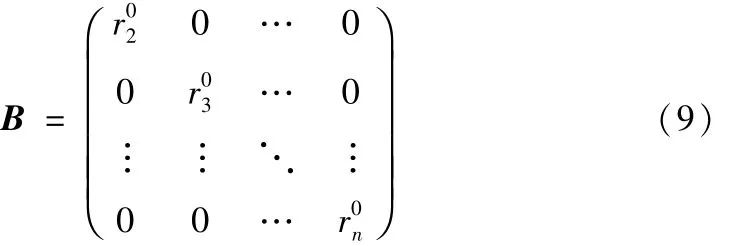
这里二阶误差可以被忽略,⊗表示两个元素乘法运算,矩阵B给出:
矩阵D给出如下:

ε1是高斯噪声Δt和Δs的线性结合的近似,用已知的协方差矩阵Qs和Qt,Δt和Δs是独立的。在未知的u和r1之间有额外的边信息,它们能被利用改进未知源定位的精确性。所以所有的有用信息对于源定位问题都可以形成以下优化问题:

此处C=diag([1,1,1,-1]),~s1=[X1,Y1,Z1,0]′,权重矩阵:

在加权最小二乘法估计量中增加u和r1之间的关系,这种方法叫做CWLS源定位。
在实践中注意计算加权矩阵W时需要真实的源定位。在文献[8-9]中方法是类似的,我们设置W=(c2Qt)-1,使用加权最小二乘法(WLS),这种方法忽略了公式(11)中的约束,获得一个初始的估计u。u用来产生一个改进的加权矩阵W。我们通过1到3次迭代重复上述过程获得满意的W。另外,我们大量的仿真结果显示用这种方式源定位的精确性和加权矩阵的近似相对不敏感,性能的退化不明显。CRLB为所有无偏差估计量误差协方差矩阵建立一个下限。我们可以从(FIM)Fisher信息的逆矩阵计算CRLB。在下面的仿真中我们将使用CRLB作为评估量的一个性能指标。
3 数值仿真
这部分包含CWLS源定位的仿真结果,以及和CWLS源定位方法、封闭源WLS方法[9]的比对。仿真场景包含8个传感器,他们的标称位置在表1中给出。在生成的仿真结果中,TDOA测量通过添加高斯噪声协方差c2Qt给真实值,σt=,T是一个(n-1)×(n-1)矩阵,对角线是1,其他是0.5。在不同位置和不同接收器的传感器位置噪声假设是高斯独立的噪声,用表示。σs=I,I是给3n×3n的单位矩阵。TDOA噪声和传感器位置噪声是独立的。我们设置σt=0.1p微秒,m,p从0.1到5
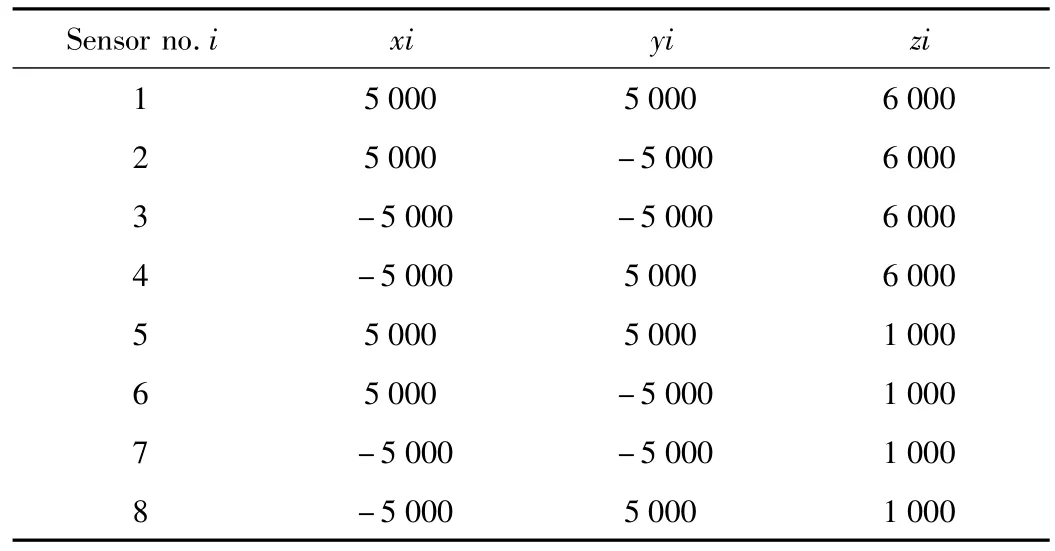
表1 传感器的标称位置(单位m)
我们考虑一个近场未知源定位[2 000,1 000,0]’m,一个远场源定位[20 000,50 000,0]’m。CWLS传感器算法的实现遵循第Ⅲ部分。为了在第二步中得到精确地加权矩阵W,我们应用备注1中迭代三次。第四步的优化问题可以用MATLAB的CVX工具箱解决。文献[9]的封闭WLS方法仿真结果被产生用以比对。定位的精确性用用平均范围误差(ARE)和标准偏差(SD)来评价,定义如下:ARE(u)=整体运行的数量。
在近场源[2 000,1 000,0]’m处,图1显示了CWLS方法(用表示未知源位置估计在l出,L=1 000是叉表示)和封闭WLS方法(用菱形表示)的定位精确性比较。图1证明了在近场源p<=3,两种方法都能到达CR下界精确性。当p=0.1时CWLS的ARE和SD都比WLS的要高,这主要是因为凸问题的数值仿真问题当噪声很小时。当3<p<4时,CWLS的性能和WLS是可比的。然而当TDOA的噪声和传感器的噪声增加到p>4时,CWLS方法取得了很明显的效果比WLS方法。
在远场[20 000,50 000,0]’m处,图2显示源定位的精确性在远场中不如近场中好。CWLS方法的性能和WLS方法是可比较的。和理论期望的一样,在阈值效应发生之前,理论(均方误差曲线)MSE曲线和CRLB是重叠的。阈值效应就是意味着从CRLB而来的源定位精确性突然误差会随着噪声的增加而改变。这是源定位问题非线性影响的一个结果。
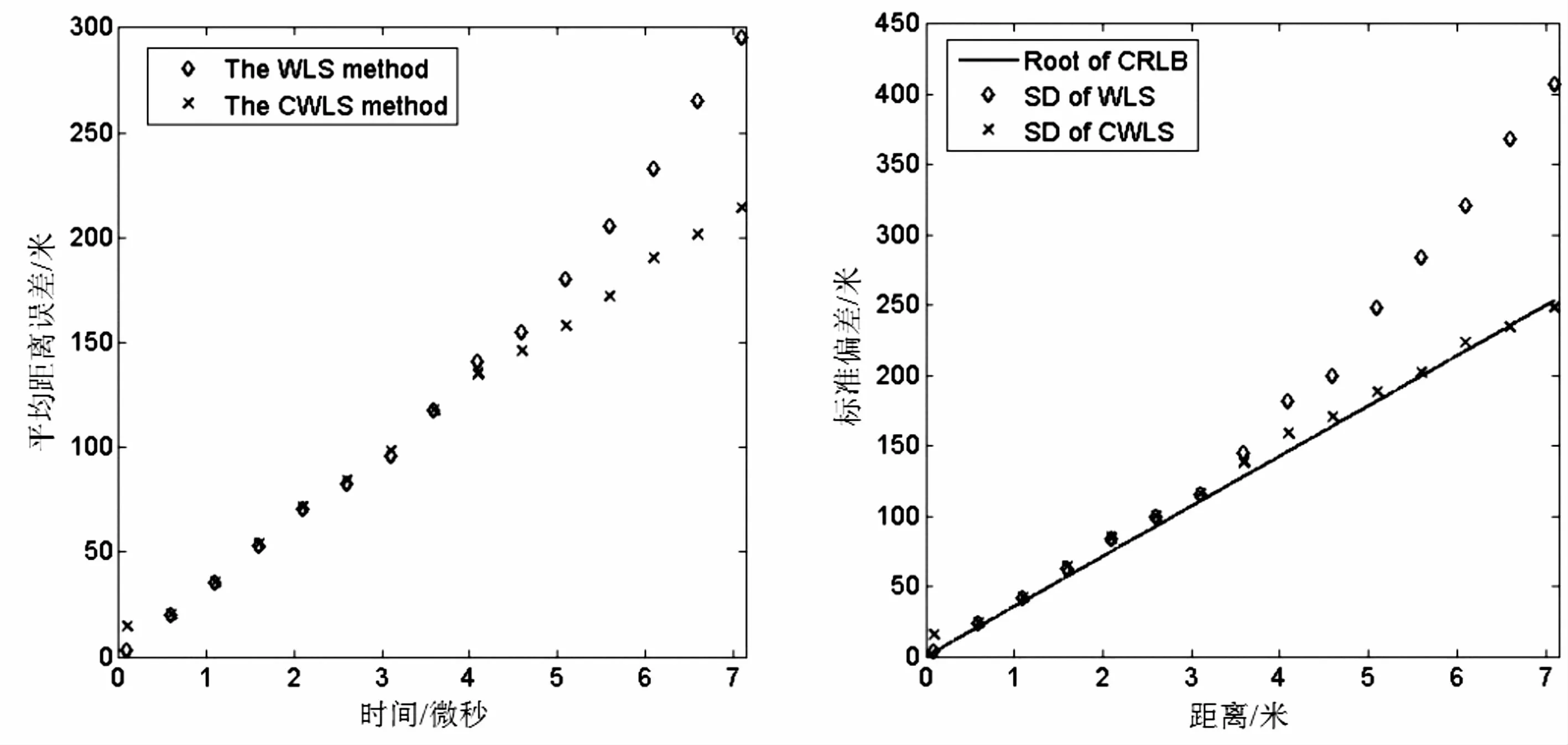
图1 近场未知源处,CW LS和封闭源W LS方法的定位精确性比较;左图是当σt=0.1p,σs=时,定位的平均误差范围;右图是对应的CRLB根和标准偏差SD。
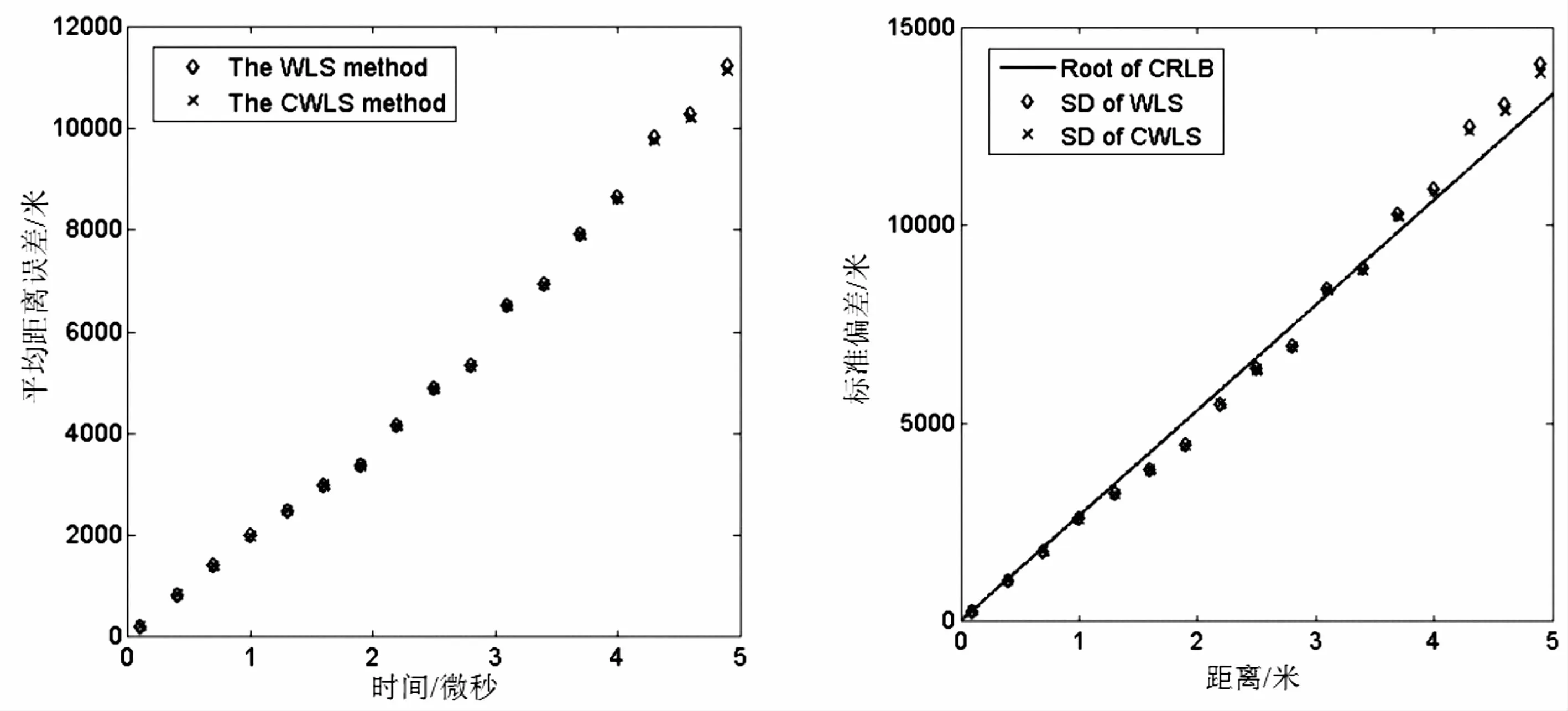
图2 远场未知源处,CW LS和封闭源W LS方法的定位精确性比较;左图是当σt=0.1p,σs=时,定位的平均误差范围;右图是对应的CRLB根和标准偏差SD
4 结束语
这篇文章在静态传感器网络中用随机传感器位置误差TDOA的测量方法来进行源定位。CWLS源定位方法是在引入一个辅助变量的情况下,把非线性TDOA方程重新排列成一个线性方程。我们直接合并未知源和辅助变量之间的关系来约束WLS的策略。非凸二次约束二次规划(QCQP)问题就是通过隐藏凸性来转化成一个凸问题。当TDOA噪声级别和传感器位置噪声级别很低时,数据的仿真结果就可以判断CWLS源定位能到达一个很精确的CRLB。在远场中CWLS方法可以和WLS方法比较,但是在近场中高噪声下,CWLS方法能显著改进源定位的精确性。
[1]E.Weinstein.Optimal source localization and tracking from passive arraymeasurements[C].IEEE Transactions on Acoustics,Speech and Signal Processing,1982,30(1):69-76.
[2]T.Rappaport,J.Reed,and B.Woerner.Position location using wireless communications on highways of the future[J].IEEE Communications Magazine,1996,34(10):33-41.
[3]W.Foy.Position-location solutions by taylor-series estimation[J].IEEE Transactions on Aerospace and Electronic Systems,1976,12(2):187-194.
[4]B.Friedlander.A passive localization algorithm and its accuracy analysis[J].IEEE Journal of Oceanic Engineering,1987,12(1):234-245.
[5]Y.Chan and K.Ho.A simple and efficient estimator for hyperbolic location[J].IEEE Transactions on Signal Processing,1994,42(8):1905-1915.
[6]Y.Huang,J.Benesty,G.Elko,and R.Mersereati.Real-time passive source localization:A practical linearcorrection least-squares approach[J].IEEE Transactions on Speech and Audio Processing,2001,9(8):943-956.
[7]K.Cheung,H.So,W.Ma,and Y.Chan.A constrained least squares approach to mobile positioning:algorithms and optimality[J].EURASIP journal on applied signal processing,2006,32:1-23.
[8]K.Ho,X.Lu,and L.Kovavisaruch.Source localization using tdoa and fdoa measurements in the presence of receiver location errors:Analysis and solution[J].IEEE Transactions on Signal Processing,2007,55(2):684-696.
[9]K.Ho,L.Yang.On the use of a calibration emitter for source localization in the presence of sensor position uncertainty[J].IEEE Transactions on Signal Processing,2008,56(12):5758-5772.
[10]M.Sun,K.Ho.An asymptotically efficient estimator for tdoa and fdoa positioning of multiple disjoint sources in the presence of sensor location uncertainties[J].IEEE Transactions on Signal Processing,2011,59(7):3434-3440.
Source Localization through TDOA Based on Static Sensor Position Error
GAO Hong-yan
(Department of Physics and Information Technology,Baoji University of Arts&Science,Baoji Shaanxi721016,China)
This paper presents a study on source localization using time difference of arrival(TDOA)measurement from static sensors in the presence of random errors in sensor positions.We develop a CWLS(constrained weighted least squares)source localizationmethod,which incorporates the relationship between the source position and an auxiliary variable as a constraint.The CWLS source localization is formulated as an indefinite constrained quadratic optimization problem-a non-convex problem.By employing the hidden convexity of the original optimization problem,the global optimal source location estimate can be efficiently obtained.Simulations prove the good performance of the proposed method.
source localization;time difference of arrival;weighted least squares;non-convex issue;constrained weighted least squares
10.3969/j·issn.1000-3886.2014.04.035
TP312
A
1000-3886(2014)04-0103-03
高红艳(1981-),女,陕西榆林人,硕士,讲师,从事信息融合数据信号处理技术研究。
定稿日期:2013-11-28
宝鸡文理学院科研项目(ZK13093)