双直线电机XY平台的模糊滑模轮廓控制
2014-07-20王丽梅左莹莹
王丽梅,左莹莹
(沈阳工业大学电气工程学院,辽宁沈阳 110870)
双直线电机XY平台的模糊滑模轮廓控制
王丽梅,左莹莹
(沈阳工业大学电气工程学院,辽宁沈阳 110870)
双直线电机XY平台在加工中负载扰动以及系统参数的变化会使其产生轮廓误差,而且任意轨迹轮廓误差为非线性函数不易进行建模。采用适用于任意轨迹建模的轮廓误差计算法建立双直线电机XY平台的轮廓误差模型并以此误差量作为具有逼近能力模糊滑模轮廓控制器的输入,使误差量在有限时间内趋近于零,以满足XY平台的高精度加工要求.仿真结果表明,所设计的双直线电机XY平台系统具有强鲁棒性和较高的轮廓精度。
XY平台;负载扰动;轮廓误差计算法;模糊滑模控制;鲁棒性;轮廓精度
0 引 言
双直线电机XY平台以其自身的多数优点已经被广泛地应用于快速的自动控制技术等领域[1]。为提高其加工精度,通常有间接和直接两种控制方式,但是在前者的控制下,不能完全的解决高精度轮廓控制问题[2]。因此对于后者的控制,文献[3-4]首先提出了只适用于线性误差模型的交叉耦合控制(CCC)用以直接地减小轮廓误差。为了解决上述问题,文献[5]提出了本质上仍然是线性变换,但是模型比较简单的任务坐标转换法。为此,随着控制技术的快速发展,轮廓误差计算法解决了上述控制方案存在的不足[6]。其控制思想是以轮廓误差量直接作为控制器的输入,通过控制器的调节来提高系统轮廓精度。例如,文献[7-8]运用了抖振问题不能消除的二阶滑模和Terminal滑模变结构控制对XY平台数控系统进行了轮廓控制器的设计。因此本文将智能控制方法和现代控制方法结合设计简单且容易实现的模糊滑模控制器用以消除抖振问题并提高轮廓精度。
本文首先建以轮廓误差模型。然后再运用模糊滑模控制的逼近能力处理轮廓误差量,使其在有限时间内趋近于零,满足永磁同步直线电机(PMLSM)直接驱动XY平台数控加工系统的高精度加工要求。
1 XY平台的轮廓误差模型
图1为任意轨迹的实时轮廓误差模型,其中期望轨迹的加工位置R1(t),实际轨迹的加工位置是P1(t),且期望轨迹上的一点是R′2(t)。假设从R′2(t)到R1(t)所需的加工时间为Δt,ex是X轴跟踪误差,ey是Y轴跟踪误差,X轴与直线R1R′2的夹角是φ。
轮廓误差为P1(t)到直线R1R′2的距离ε,VR1为R1(t)点的平均速度,Vp1为P1(t)点的平均速度,V1和V2分别为R1(t)R′2(t)两点的切线速度且下角标X,Y分别代表X轴和Y轴,由以上这些推出

图1 任意轨迹的实时轮廓误差

得出:

最终推导出任意轨迹轮廓误差公式为:

2 XY平台模糊滑模轮廓控制器设计

双直线电机XY平台离散系统的状态方程如下:设位置指令为r(k)且其导数为d r(k)满足R=[r(k),d r(k)],R1=[r(k+1),d r(k+1)],r(k+1)和d r(k+1)采用线性外推的方法进行预测:r(k+1)=2r(k)-r(k-1),d r(k+1)=2d r(k)-d r(k-1)定义位置偏差信号为e=R(k)-x(k)且切换函为:

式中Ce=[c,1]
采用二维模糊控制器,通过模糊控制规律直接设计滑模控制量u。设模糊控制器的输入是s和s^,它们分别是s(k)和d s(k)的模糊化变量,模糊控制器的输出ΔU是控制的变化量Δu的模糊化变量。
定义控制器输入和输出为如下形式且模糊化变量均选择高斯隶属度函数

其论域为:

模糊规则的确定是力图满足不定式s·s<0的条件下设计u,所得控制规则表如表1所示,其中第一行和第一列分别代表·s和s且模糊规则是:

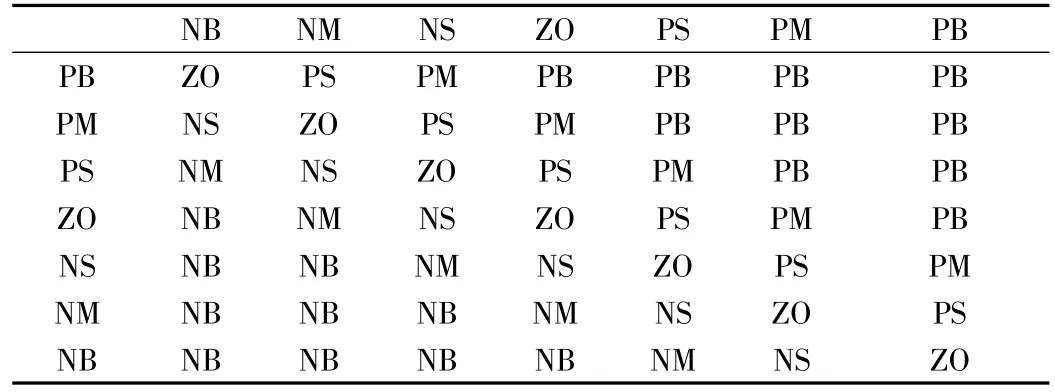
表1 模糊规则表
采用重心法反模糊化,其公式为:

双直线电机XY平台系统的模糊滑模轮廓控制结构如图2所示。
其中Px,Py分别为X、Y轴的比例位置控制器;Kvx,Kvy分别为对X、Y轴的PID速度控制器。
3 仿真与分析
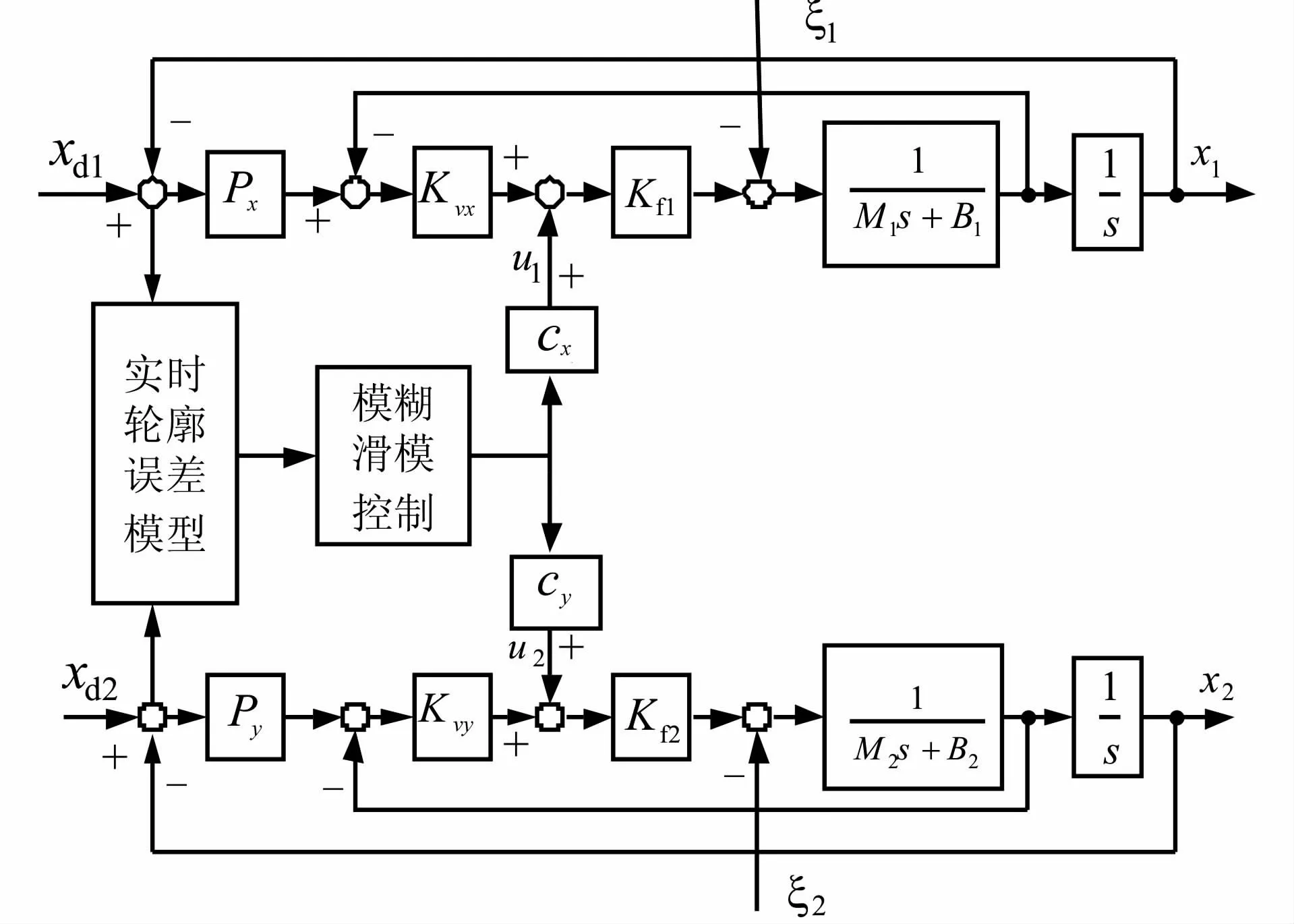
图2 XY平台控制结构图
本文电机参数分别为M1=5.8 kg,M2=1.4 kg,Mf1=10.979 N/A,Mf2=0.852 6 N/A,B1=244.319 2 Ns/m,B2=82.017 6 Ns/m且规划的跟踪轨迹为五角星轮廓.两轴位置控制器Px=2.87,Py=2.95;速度控制器Kvx的积分、比例、微分增益分别为510,39.94,21;Kvy的积分、比例、微分增益分别为605,40.5,20滑模面参数c=10
图3为双直线电机XY平台的五角星输出轨迹。图4、为系统参数变化20%以后在2 s时向各轴突加150N的负载扰动时直接驱动XY平台的单轴期望位置输出与实际位置输出曲线.可以明显地看出,基于轮廓误差计算误差法的模糊滑模控制作用下,实际输出曲线和期望轨迹基本相一致,具有良好地跟踪性。
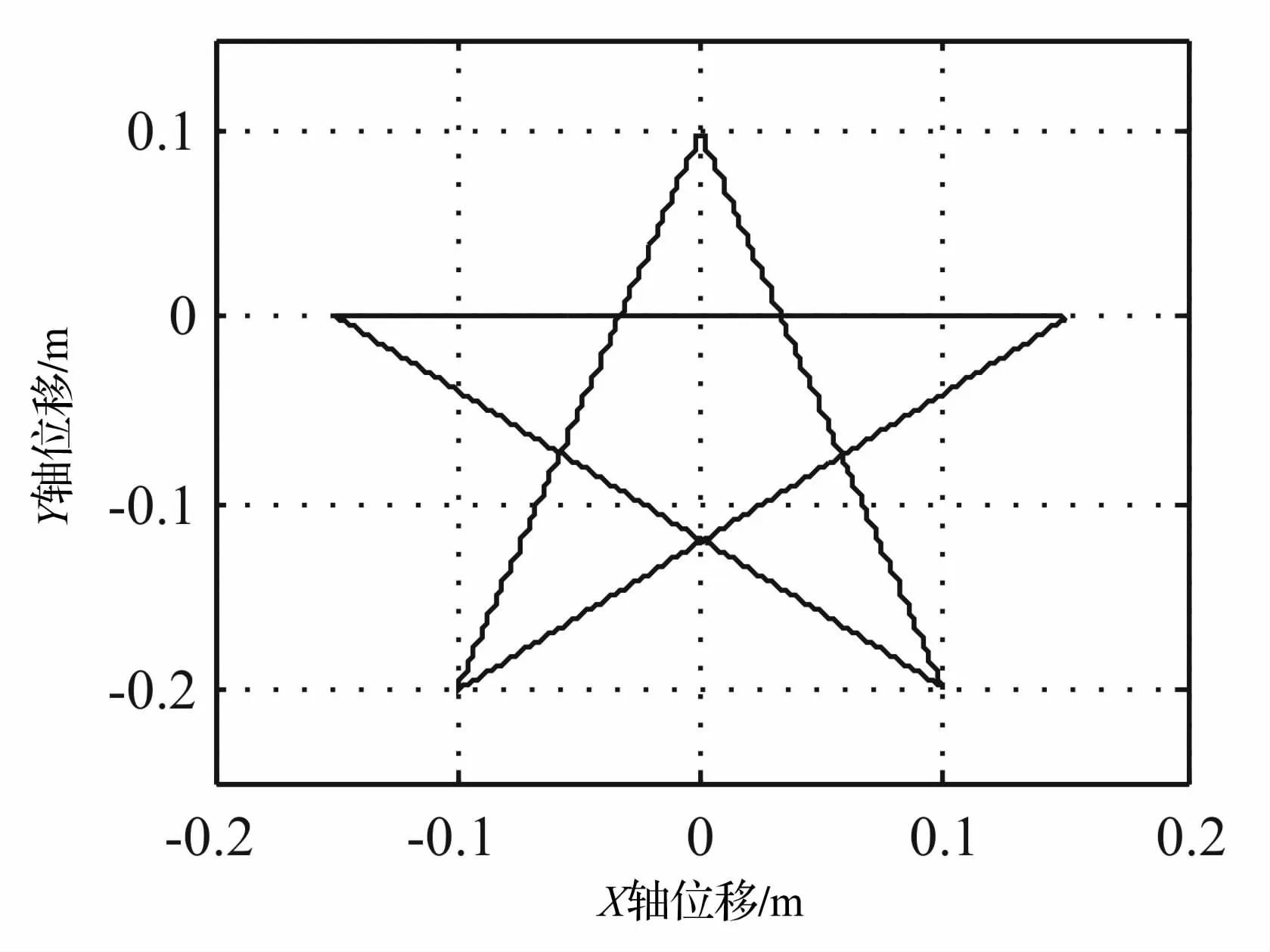
图3 五角星输出轨迹
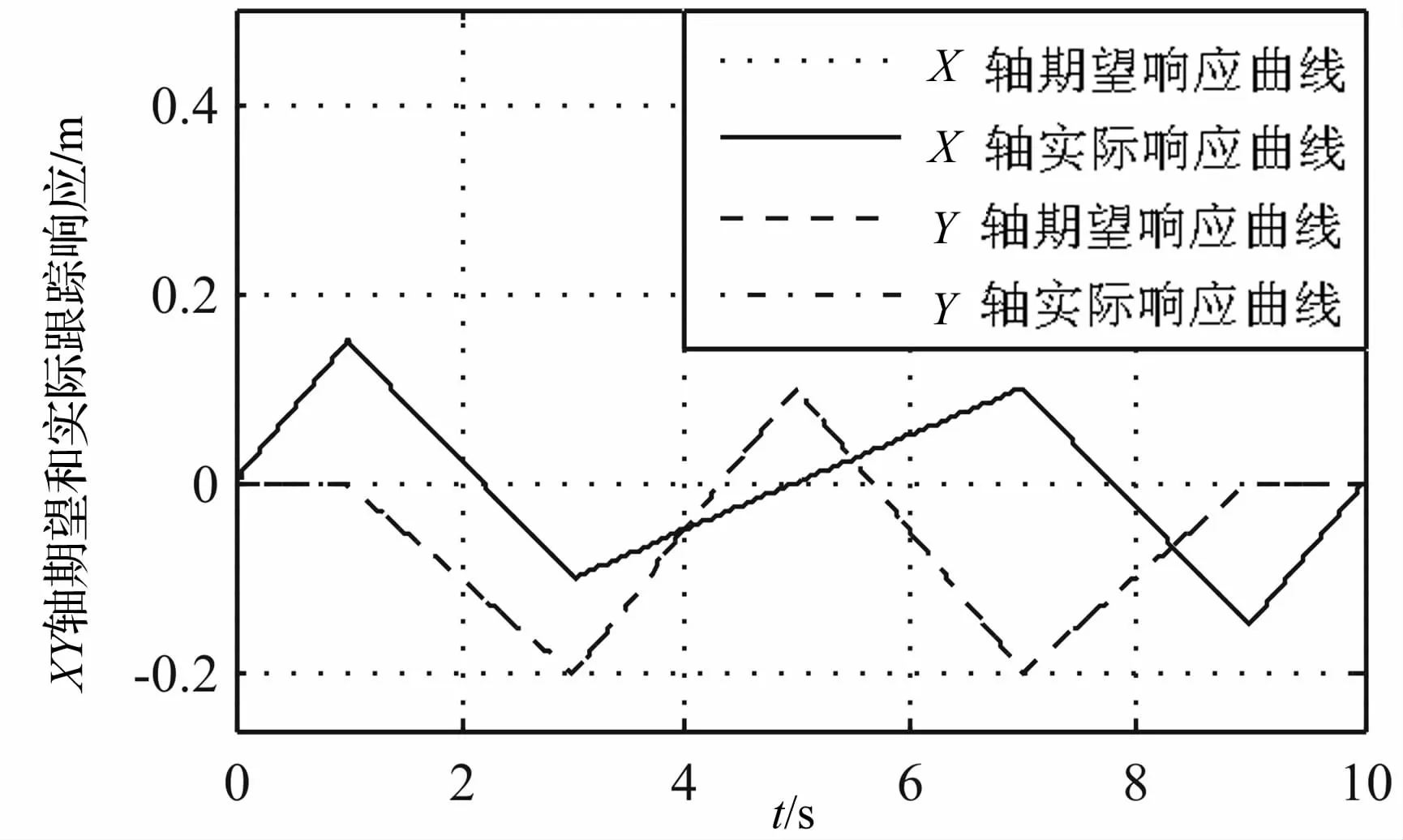
图4 X轴期望和实际输出响应曲线
图5为同样仿真条件下的单轴位置误差响应曲线,可以看出,X轴位置精度达到±0.04mm,Y轴位置精度达到±0.03 mm,而且在外界扰动存在的情况下,系统很快地跟踪上了给定信号,保证了直接驱动XY平台控制系统具有较好的抗扰性和较强的鲁棒性。
图6为同样仿真条件下的轮廓误差曲线,可以看出,其精度与单轴的精度相比有一个数量级的提高,并在扰动和参数变化的情况下,保证了直接驱动XY平台控制系统具有较好的抗扰性和较强的鲁棒性。

图5 XY轴跟踪误差响应曲线
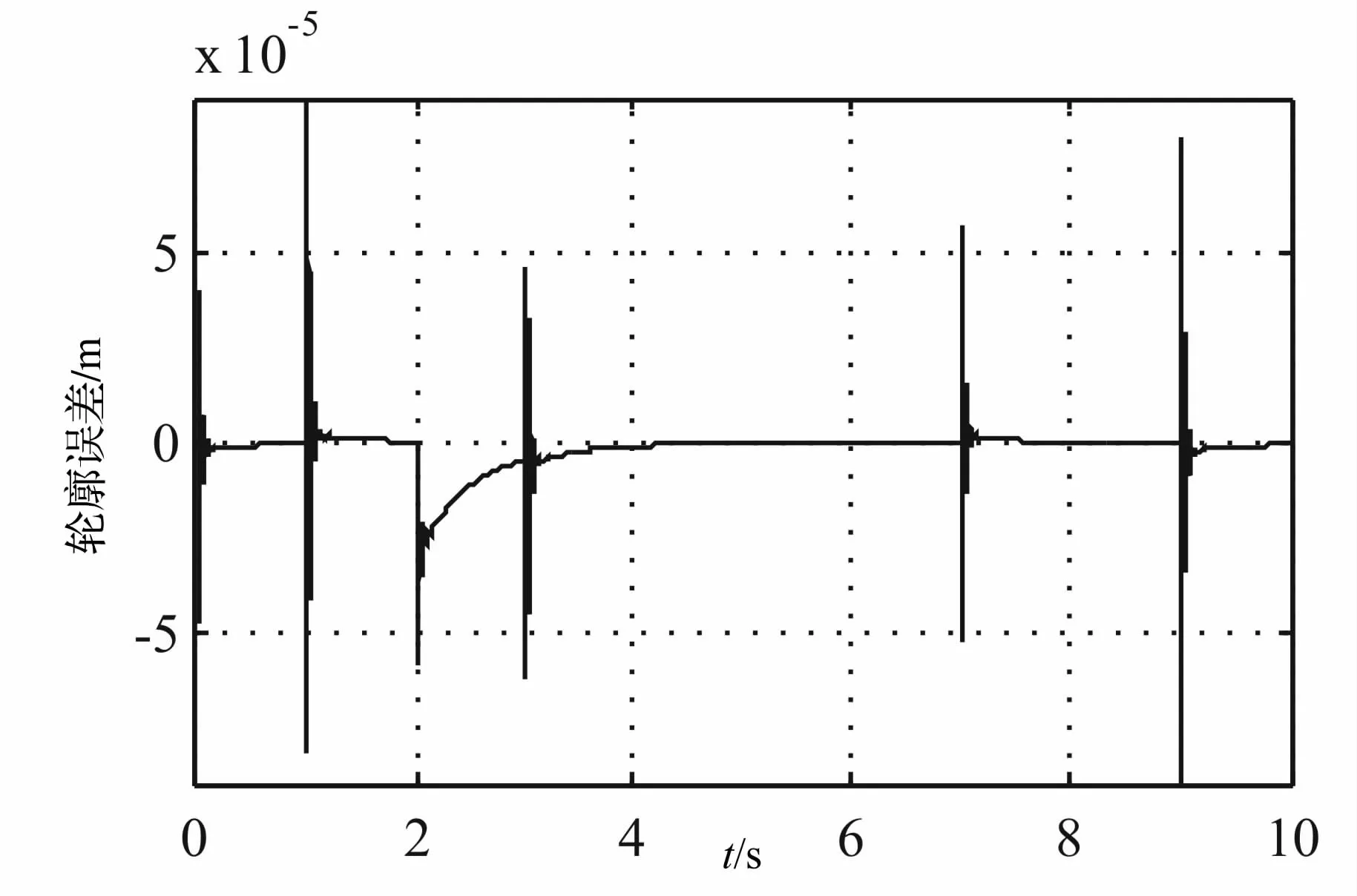
图6 轮廓误差曲线
图7(a)和(b)分别是基于滑模和模糊滑模控制的控制输入量曲线,后者的摄动问题小于前者,因此后者控制有效地减弱了滑模的摄动问题。
4 结束语
本文首先采用轮廓误差计算法建立了可用于任意轨迹跟踪且便于计算的双直线电机XY平台的轮廓误差模型.然后采用模糊滑模控制进行了轮廓控制器的设计,削弱了负载扰动和系统参数变化对控制系统的影响,进而提高其抗扰性和鲁棒性.仿真结果表明,所设计控制系统有效地提高了双直线电机XY平台的轮廓加工精度。
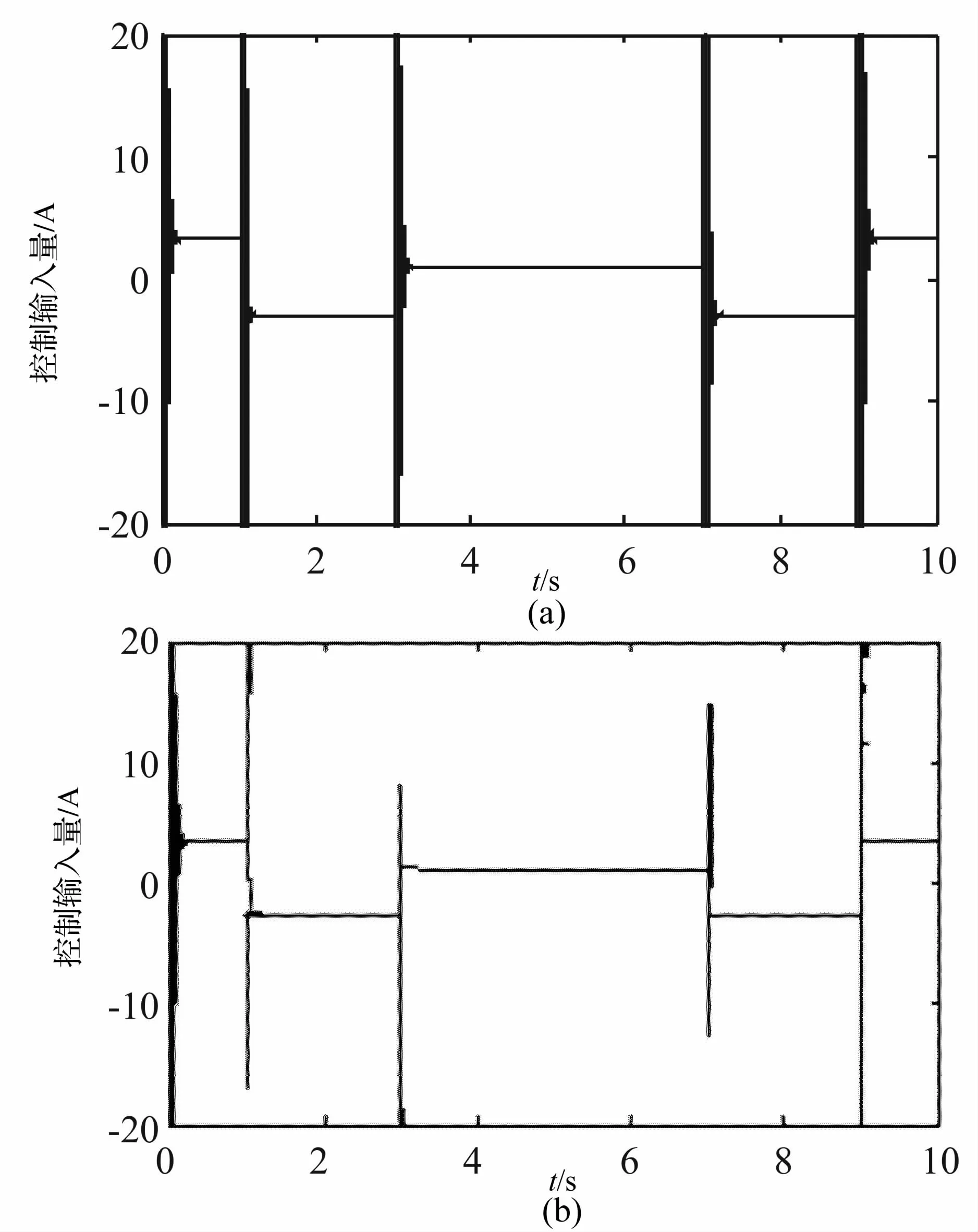
图7 控制输入
[1]赵希梅,郭庆鼎.为提高轮廓加工精度采用DOB和ZPETC的直线伺服鲁棒跟踪控制[J].电工技术学报,2006,21(6):111-114.
[2]赵希梅,郭庆鼎.基于ZPETC和CCC的直接驱动XY平台高精度控制[J].组合机床与自动化加工技术,2011,21(6):111-114.
[3]丛爽,刘宜.多轴协调运动中的交叉耦合控制[J].机械设计与制造,2006,(10):166-168.
[4]SUN Dong,SHAO Xiao-yin,FENG Gang.A Model-free cross-coupled control for position synchronization of multi-axis motions[J].IEEE Transactions on Control Systems Technology,2007,15(2):306-314.
[5]YANG Jiang-zhao,ZHANG Dong-jun,LIZe-xiang.Position loop-based cross-coupled control for high-speed machining[C].Proceedings of the 7thWorld Congress on Intelligent Control and Automation,Chongqing,2008:4285-4290.
[6]CHENG Ming-yang,SU Ke-han,WANG Shu-feng.Contour error reduction for free-form contour following tasks of biaxial motion control systems[J].Robotics and Computer-Integrated Manufacturing,2009,25(2):323-333.
[7]王丽梅,金抚颍,孙宜标.基于等效误差的直线电机XY平台二阶滑模控制[J].中国电机工程学报,2010,30(6):88-92.
[8]王丽梅,陈吉超,郑浩.直接驱动XY平台全局快速Terminal滑模控制[J].沈阳工业大学学报,2012,34(1):1-5.
Fuzzy Sliding Mode Contour Control of the XY Table of the Double Linear Motor
WANG Li-mei,ZUO Ying-ying
(School of Electrical Engineering,Shenyang University of Technology,Shenyang Liaoning 110870,China)
Load disturbance and system parameter change of the XY table of the double linearmotor will produce contour errors in the process,and any trajectory contour error is a nonlinear function for which modeling is difficult.This paper uses contour error calculation algorithm appropriate for any trajectory modeling to establish a contour errormodel for double linear motor XY table,and uses this contour error as the input of the fuzzy slidingmode contour controller with approximation ability so that the contour errormay tend to be zero in limited time tomeet the high precision machining requirement of the XY table.Simulation results show that the designed double linearmotor XY table system has strong robustness and high contour accuracy.
XY table;load disturbance;contour error calculation algorithm;fuzzy slidingmode control;robustness;contour accuracy
10.3969/j·issn.1000-3886.2014.04.005
TM301.2
A
1000-3886(2014)04-0013-03
王丽梅(1969-),女,辽宁建平人,教授,博士生导师,主要从事交流伺服驱动技术的研究。
定稿日期:2013-09-16
国家自然科学基金资助项目(51175349);辽宁省高等学校优秀人才支持计划资助(LR2013006);沈阳市科技计划项目(F13-316-1-48)