基于SRMA-UKF的永磁同步电机无传感器系统设计
2014-07-20黄旭超林荣文
黄旭超,林荣文
(福州大学电气工程与自动化学院,福建福州350108)
基于SRMA-UKF的永磁同步电机无传感器系统设计
黄旭超,林荣文
(福州大学电气工程与自动化学院,福建福州350108)
为了解决传统UKF在永磁同步电机无传感器系统中存在的鲁棒性差、由于舍入误差导致的协方差矩阵发散的问题,提出了带遗忘因子的平方根UKF算法,在滤波过程中采用平方根矩阵代替协方差矩阵进入迭代运算,有效的克服了系统的发散问题,并且通过引入了遗忘因子的概念,将原有滤波器改造成强跟踪滤波器,从而提高了系统的鲁棒性。从MATLAB/Simulink仿真结果可以发现,与UKF、SR-UKF相比,对于突变状态的跟踪能力,SRMA-UKF有较大的提高,转子速度以及转子位置跟踪更精确,误差更小,鲁棒性得到提高。
永磁同步电机;SRMA-UKF;强跟踪滤波器;鲁棒性;MATLAB/Simulink
0 引 言
近年来,无迹卡尔曼滤波器作为非线性速度和位置估计器应用在永磁同步电机无传感器系统已经取得了很多成果,得到了相当的发展,但是这种控制系统始终存在着两个问题,那就是:在数值计算上往往存在舍入误差的问题,有时会得到负定的协方差矩阵,从而导致滤波器发散,影响滤波算法的收敛速度和稳定性;其次,在提高系统鲁棒性上没有太多的改善。针对第一个问题,可以通过平方根UKF(SR-UKF)[1]解决,将误差协方差矩阵“开根号”后带入卡尔曼迭代过程,从而保证了协方差矩阵的正定性问题,防止滤波器发散;另外,在系统中加入遗忘因子,将滤波器改造成强跟踪滤波器,改善系统对于模型不确定性和突变状态的跟踪性能,提升系统鲁棒性。本文构建了永磁同步电机无传感器控制系统,采用带遗忘因子的平方根UKF(SRMA-UKF)[2]进行永磁同步电机转子位置和转速估计,并通过数字仿真,证明其有效性。
1 SRMA-UKF滤波算法
1.1 UKF算法
UKF算法是Kalman滤波的推广,它具有Kalman滤波的递推结构,是UT(无迹)变换和Kalman滤波的结合,考虑一大类非线性系统:式中xk是k时刻系统n维状态变量,wk为加性高斯过程噪声,vk是加性高斯量测噪声,wk、vk线性无关,过程噪声协方差矩阵定义为Q,量测噪声协方差矩阵定义为R。
初始化:

对初始值进行Sigma点采样,得到Sigma点集:

λ=α2(n+κ-n)为一个比例常数,α决定采样点在^附近的扩展,一般取一个较小的数,本文选取0.01,κ是一个比例常数,在高斯分布中一般取,β根据x的先验分布设置,如果x服从高斯分布,则β取2。
状态预测:


其中Xi,k|k-1为Xk|k-1的第i列向量。
状态预测协方差矩阵:

量测预测更新:
其中Yi,k|k-1为Yk|k-1的第i列向量。量测残差协方差矩阵:

状态量测互协方差矩阵:

滤波增益:

状态更新:

状态误差协方差矩阵更新:

1.2 SR-UKF算法
在卡尔曼滤波中,随着滤波计算的逐渐深入,舍入误差会造成滤波误差协方差矩阵P和预测误差协方差矩阵Pk|k-1失去非负定性和对称性,进而使滤波增益矩阵计算失真而造成滤波器发散,如果将滤波过程中的误差协方差矩阵P和预测协方差矩阵Pk|k-1分别开根号,并在滤波递推过程中以其根植的递推关系代替p和pk|k-1的递推关系,则可以保证在任何时刻误差协方差和预测协方差都是正定的。SR-UKF算法是在常规UKF算法的基础上进行的,SR-UKF采用协方差平方根进行递归运算,矩阵的平方根分QR分解和Cholesky因子更新两步[3]:

这时的Kalman增益改写为:

最后再用一个两阶的Cholupdate更新状态协方差的平方根:

1.3 强跟踪滤波器
若一个滤波器具有如下优良特性:1.极强的关于突变状态的跟踪能力。甚至在系统达到平稳状态时,仍保持对缓变状态与突变状态的跟踪能力。2.较强的关于模型不确定性的鲁棒性。3.适中的计算复杂性。则称其为强跟踪滤波器(STF)[4]。使一个滤波器成为强跟踪滤波器的充分条件是满足正交性原理,即选择一个时变的增益矩阵,满足以下的正交性条件:

式中γk为残差序列,。
文献[5]给出了UKF满足强跟踪滤波时增益矩阵Kk的选取办法:

引入遗忘因子λk,则Kk可表示为:


对上式求迹,得:

整理得到:

式中Ck的实际值,0≤ρ≤0.95为遗忘因子,遗忘因子对收敛性影响不大,一般取ρ=0.95。
2 永磁同步电机的数学模型
永磁同步电机无传感器控制的原理图(见图1),系统主要分为:逆变器模块、转子位置与速度估计模块、坐标变换模块、电流调节器和永磁同步电机,五大部分。

图1 永磁同步电机无传感器控制的原理图
永磁同步电机在αβ坐标系下的方程为:

其中p为微分算子,Ls为电感,Rs为定子电阻,Ψf为转子磁链,上式变换后得到:
选取状态变量、输入变量、输出变量:

离散化后得到系统的状态转移方程:
其中Qxx为过程噪声矩阵对角线上的对应元素,同理,可以得到离散化后系统的量测方程:

其中Rxx为量测噪声矩阵对角线上的对应元素。
3 仿真结果
使用MATLAB7.8对系统进行仿真,设定系统仿真时间0.1 s。所使用的电机模型参数为:转动惯量J=0.8×10-3kg·m2,极对数NP=4,定子电阻2.875Ω,定子直轴和交轴电感Ls=8.5 mH,转子磁链ψf=0.175Wb。系统仿真中解算器使用ode23t,给定速度范围0~3 000 r/min。转子位置和转速估计模块采用S函数实现[6]。
SRMA-UKF采样周期为1×10-4s,由于MATLAB7.8中转角定义为转子q轴和α轴间的夹角,而本文中的坐标变换中,转角定义为转子d轴和α轴间的夹角,相差0.5π,在仿真模型中需要加上1.5π,所以初始状态为[0,0,0,1.5π],估计误差协方差矩阵初始值P0=diag(0.04,0.04,5870,28),过程噪声协方差矩阵和量测噪声协方差矩阵分别为Q=diag(1×10-4,1×10-4,1× 10-2,1×10-3),R=diag(0.01,0.01)
电机空载波形如图2所示,比较UKF、SR-UKF、SRMA-UKF波形可以发现,如理论分析一样,SRMA-UKF最快进入稳态,鲁棒性较之SR-UKF有显著的增加,在系统趋于稳态后,遗忘因子也趋于1,系统退化为普通的SR-UKF,三种估计算法在稳态精度上相近,区别在于动态过程的跟踪精度上,图3表示了ω=450 r/min,空载情况下,转子位置角误差曲线,可以看到,在动态过程中,SRMA-UKF的转子位置误差是最小的。
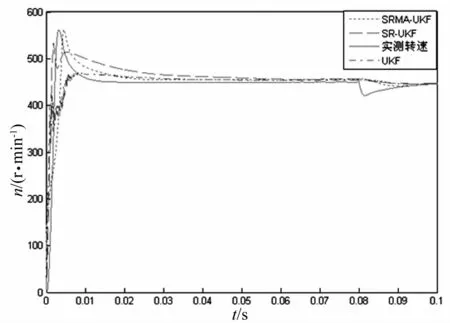
图2 ω=450 r/min时,转子速度曲线
下图显示了在0.08 s时负载由3 N·m突变为6 N·m负载增加情况下估计器的运行状况,可以看出,SRMA-UKF在转速估

图3 ω=450 r/min时,转子位置误差曲线
计和转角位置误差上依然比较优秀。
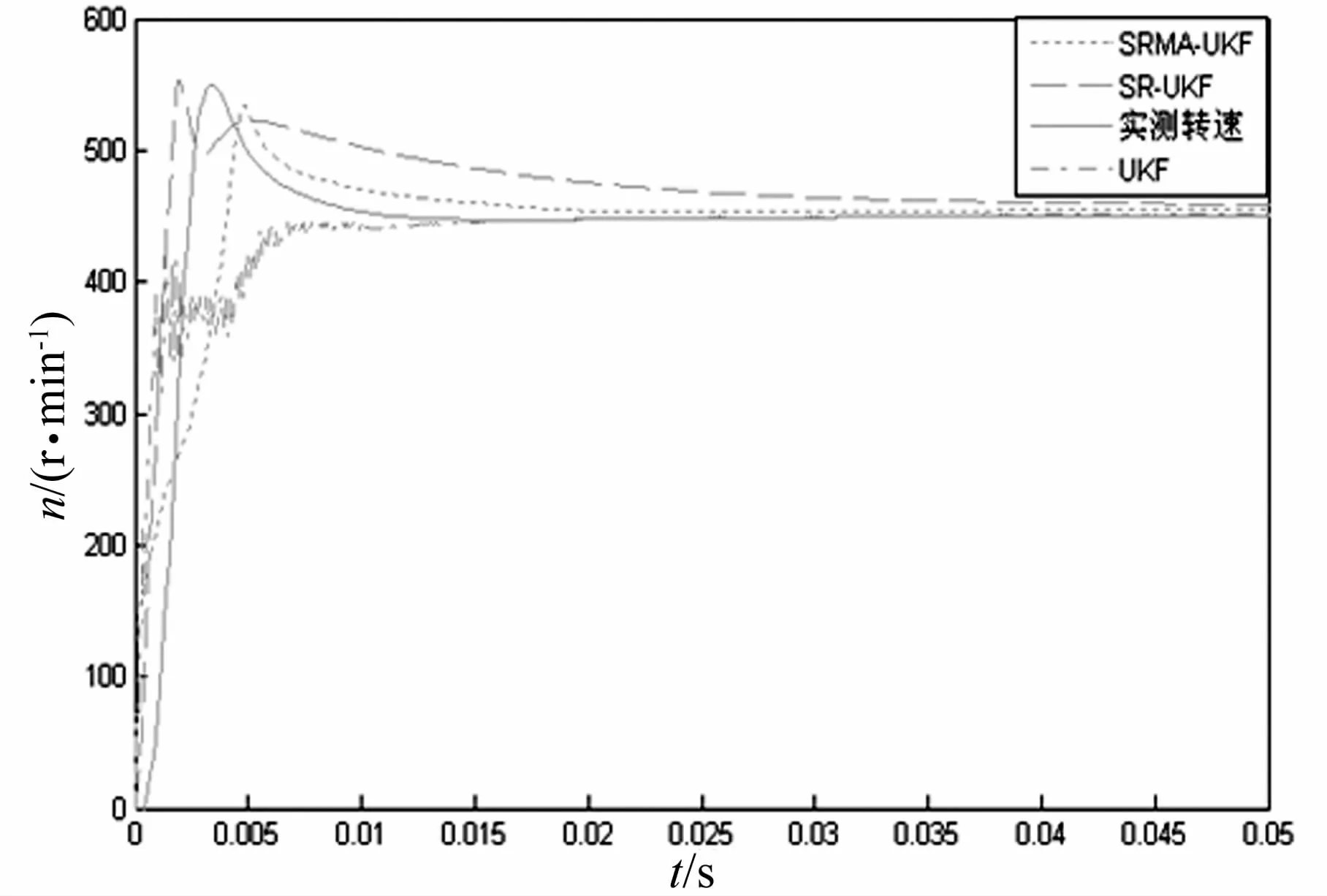
图4 负载增加时转子速度曲线

图5 负载增加时转子位置误差曲线
4 结束语
本文提出了基于SRMA-UKF的永磁同步电机无传感器控制系统。通过引入遗忘因子和对协方差矩阵开根号,从而提高了系统的鲁棒性并且保证了协方差矩阵的正定性,有效的避免了滤波器的发散。从以上分析可以得出:SRMA-UKF如理论估计的一样,在鲁棒性上较之SR-UKF、UKF有了提升,在计算量上,仅仅增加了矩阵求迹这一过程,并未有太大的增加。因此是一种较为优秀的转速、位置估计算法。
[1]曲智勇,姚郁,韩俊伟.基于改进型平方根UKF算法的永磁同步电机状态估计[J].电机与控制学报,2009,13(3):452-457.
[2]许迅雷.基于方根分解形式的带衰减因子UKF算法应用[J].数学的实践与认识,2012,42(8):97-101.
[3]刘胜,张红梅.最优估计理论[M].北京:科学出版社,2011:100-102.
[4]齐立峰,陶建锋,冯新喜,等.一种改进的UKF非线性滤波器研究[J].弹箭与制导学报,2011,32(2):179-181+188.
[5]许波,朱熀秋,姬伟.基于改进UKF滤波的永磁同步电动机矢量控制[J].微特电机,2012,40(1):1-4.
[6]葛哲飞.精通MATLAB[M].北京:电子工业出版社,2008.
SRMA-UKF-based Design of the Sensorless System for Permanent Magnet Synchronous Motors
HUANG Xu-chao,LIN Rong-wen
(College of Electric Engineering and Automation,Fuzhou University,Fuzhou Fujian 350108,China)
To overcome shortages of traditional UKF in the sensorless system of the permanentmagnet synchronousmotor(PMSM),such as poor robustness and covariance matrix divergence caused by rounding error,this paper presents an algorithm of square root unscented Kalman filter(UKF)with forgetting factor.In the filtering process,square rootmatrix,in place of covariance matrix,is used in iterative computation,thus overcoming the divergence problem of the system effectively.Furthermore,through introduction of the concept of forgetting factor,the original filter is changed into a strong tracking filter,so as to improve the robustness of the system.It can be seen from the result of MATLAB/Simulink that as compared with UKF and SR-UKF,SRMA-UKF has achieved much improvement ofmutation-tracking ability.The rotor speed and position tracking becomes more accurate with less error and better robustness.
permanentmagnet synchronousmotor(PMSM);SRMA-UKF;strong tracking filter;robustness;MATLAB/Simulink
10.3969/j·issn.1000-3886.2014.04.002
TM921.2
A
1000-3886(2014)04-0004-03
黄旭超(1989-),男,福建人,在读研究生,研究方向:新型电机设计与控制技术。 林荣文(1963-),男,福建人,教授,研究方向:新型电机理论与控制,电机电器电磁场理论。
定稿日期:2013-10-30