某无人机火箭助推发射段动态分析与仿真
2014-07-18马威马大为崔龙飞
马威,马大为,崔龙飞
(南京理工大学 机械工程学院,江苏 南京 210094)
某无人机火箭助推发射段动态分析与仿真
马威,马大为,崔龙飞
(南京理工大学 机械工程学院,江苏 南京 210094)
为检验某无人机火箭助推发射装置的性能,建立无人机发射系统的三维实体模型及有限元模型,并基于显式动力学方法对无人机有限元模型进行动力学仿真。由仿真结果可知,能量平衡关系得到了满足,无人机运动特性均满足设计要求,为无人机的发射提供了一定的参考。
无人机;火箭助推发射;动力学仿真
0 引言
无人机是“无人驾驶空中飞行器”的简称,它的出现己有近一百年的历史。随着科学技术的发展,无人驾驶飞机在军事领域的应用日益广泛,已经从早期的无人驾驶侦察机,发展至今天的无人驾驶电子干扰机、无人驾驶攻击机和无人驾驶作战机,无人机己经从战术用途发展为战略用途。无人机具有隐蔽性好,生命力强;造价低廉,不惧伤亡;起降简单,操作灵活等诸多优点而备受各国青睐[1,2]。因此,探讨无人机飞行关键阶段的起飞发射技术,保障无人机稳定安全起飞,对无人机发射方案选择具有参考价值,对无人机的未来发展具有十分重要的意义。
火箭助推发射是无人机飞行过程中较为复杂的阶段之一。飞机从静态借助推火箭和发动机推力达到一定的高度和速度,并保持一定的姿态。此阶段的特殊性在于飞行速度、高度较低,气动舵面控制效果差,姿态对发射参数极为敏感。在气动力还不能充分起作用的发射初期,良好的发射方式是决定发射成功与否的关键。而无人机发射阶段中的沿滑轨起飞到脱离滑轨这一阶段是起飞阶段的第一步,这个阶段的发射方式和发射参数的设置在整个无人机发射过程中起着至关重要的作用。本文以某类无人机为研究对象,按照箱式火箭助推发射方式,建立了有限元模型,分析了无人机滑轨起飞段动态特性,得到了无人机的能量平衡关系和运动学特征,为无人机的发射提供一定的理论参考。
1 无人机模型的建立
无人机的固定参数:圆柱机身,半球形头部,平直机翼,正常式布局,喷气式动力设计;飞机外形尺寸为:机长3.6m,翼展2.3m,机高1m,机身直径0.4m,最大飞机质量不超过400kg。
该无人机采用火箭助推方式发射,并由发射箱储存和运输,发射时无人机沿左右两条滑轨飞出。为充分利用发射箱空间,解决发射箱尺寸与尾翼展长之间的矛盾,该箱式发射无人机采用折叠尾翼。无人机发射系统的三维实体模型主要由发射箱和无人机两大部分组成,如图1所示。

图1 无人机发射系统的三维实体模型
发射箱平时处于水平状态,发射时可将发射箱机头一侧顶起,使飞机以不同的发射角进行发射。
2 无人机模型的有限元分析
2.1 显式动力学方法
由于无人机发射过程中存在接触、大位移和碰撞等问题,涉及高速非线性动力学和复杂结构动力学精确建模等研究领域。显式方法特别适用于求解高速动力学事件,它需要许多小的时间增量来获得高精度的解答,如果事件持续的时间非常短,则可能得到高效率的解答,所以文中求解无人机动态响应过程采用显式动力学方法[3,4]。
动力学求解的基本方程形式如下:

(1)

(2)











(3)
在当前增量步开始时(t时刻),计算加速度为:
(4)
由于显式算法总是采用一个对角的、或者集中的质量矩阵,所以求解加速度并不复杂,不必同时求解联立方程。任何节点的加速度完全取决于节点质量和作用在节点上的合力,这使得节点计算的成本非常低。
对加速度在时间上进行积分采用中心差分方法,在计算速度的变化时假定加速度为常数。应用这个速度的变化值加上前一个增量步中点的速度来确定当前增量步中点的速度:
(5)
速度对时间的积分并加上在增量步开始时的位移以确定增量步结束时的位移:
(6)
在增量步开始时提供了满足动力学平衡条件的加速度。得到了加速度后,在时间上“显式地”前推速度和位移。所谓“显式”是指在增量步结束时的状态仅依赖于该增量步开始时的位移、速度和加速度。为了使该方法产生精确的结果,时间增量必须相当小,这样在增量步中加速度几乎为常数。由于时间增量步必须很小,一个典型的分析需要成千上万个增量步。由于不必同时求解联立方程组,所以每一个增量步的计算成本很低。大部分的计算成本消耗在单元的计算上,以此确定作用在节点上的单元内力。单元的计算包括确定单元应变和应用材料本构关系(单元刚度)确定单元应力,从而进一步计算出内力。
2.2 有限元模型
根据无人机各构件的几何尺寸,利用有限元分析软件ABAQUS建立无人机发射系统有限元模型,包括无人机的发射箱、机身、机翼、助推火箭、发射导轨、滑块、导轨架等,网格模型如图2所示。
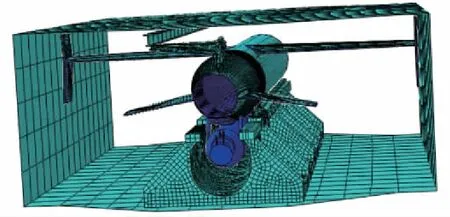
图2 无人机发射系统的网格模型
根据相互位置关系和约束关系建立边界条件,利用显式动力学方法求解无人机发射的运动规律和冲击载荷。
3 结果分析
无人机在导轨滑行助推段,飞行速度较低,且受到导轨的约束,因此不考虑空气动力;燃气流对无人机的发射也有一定影响,但不作为本文研究重点,故不作考虑。无人机此时受到的力主要是:助推火箭的推力、无人机发动机的推力、导轨对机体(滑块)的支撑碰撞约束力、限位开关未开锁时的闭锁力以及重力[5,6]。在无人机有限元模型中加载这些力,通过计算分析,得到了无人机的能量平衡和运动特性。
3.1 能量分析(图3)
由图3可见,助推发射时动能一直在不断增加,能量总和始终近似保持为0,这表明能量平衡关系得到了满足,该分析得到了合理的响应。

图3 动能ALLKE与能量总和ETOTAL
3.2 运动学分析
1) 无人机质心的位移(图4,图5)
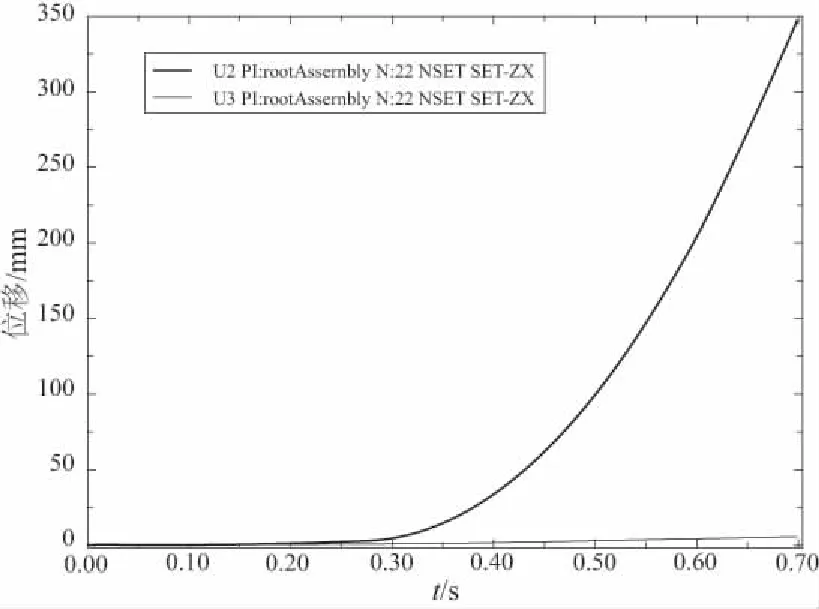
图4 y,z二方向的位移时间历程

图5 x,y,z三方向的位移时间历程
由图4和图5可见,在0.2s末时,无人机脱离滑轨,开始向上起飞;0.7s末,无人机的上升高度比较小,前进位移远大于上升位移。
2) 无人机质心的速度(图6、图7)
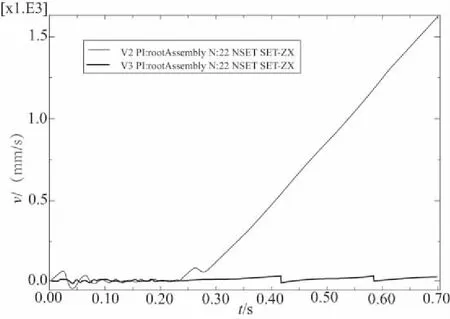
图6 y,z二方向的速度时间历程
由图6和图7可见,V2是升力方向的速度,从0.2s末开始增加。V3是横向速度,在脱离滑块时有两次震动。V1为前进的速度,一直在加速。无人机在离轨时有一定的抖动,在0.6s左右后,无人机飞行趋于平稳。

图7 x,y,z三方向的速度时间历程
从仿真结果来看,无人机发射阶段速度增长很快,而高度增加相对较慢;在前0.6s内,无人机速度较慢,气动力较小,控制系统未能完全起作用;特别是如果采取小角度发射时,助推火箭必须有一定的纵向安装角,否则无人机将有坠地的危险。
3) 无人机质心的加速度(图8)

图8 x,y,z三方向的加速度时间历程
无人机在发射阶段加速度的大小直接关系到机体材料以及飞机内部各部件仪器的承受程度。飞机质心在最初0.7s的加速度变化曲线如图8所示。可以看出无人机滑轨起飞段,滑块和导轨有一定的碰撞,因此,助推火箭不能有过大的纵向安装角。
5 结语
利用ABAQUS软件对无人机火箭助推发射段进行仿真,得出火箭助推起飞段无人机的能量变化以及助推结束后无人机的高度、速度、加速度等参数,为无人机的发射提供一定的理论参考。
从速度、高度以及加速度的变化来看,助推火箭工作段结束后,无人机的动态特性均能达到设计指标。但由于无人机在离轨后飞行速度还很慢,空气产生的动力还不足以使控制舵完全起作用,且在小角度发射时空气升力也较小,要确保无人机的安全发射,使其在短时间内达到一定的飞行高度,需要采用一定的发射角和火箭安装角进行发射。
[1] 何庆,刘东升,于存贵,等.无人机发射技术[J].飞航导弹.2010,2:24-27.
[2] 汪汝伟.无人机车载箱式发射结构优化、动力学仿真及有限元分析[J].南京理工大学.2007:1-57.
[3] 庄茁,由小川,等.基于ABAQUS的有限元分析和应用[D].北京:清华大学出版社.2009.
[4] 蔡德勇,马大为.无人机折叠尾翼机构性能分析及改进设计[J].机械设计.2011,28(7):65-68.
[5] 周同礼.某型无人机发射段飞行轨迹研究[J].南京航空航天大学学报.1988,20(3):49~57.
[6] 裴锦华,吴泊宁.大型无人机双发火箭助推发射技术的研究[J].南京航空航天大学学报.1999,31(3):342-345.
Dynamic Analysis and Simulation of Rocket Booster Launching Process of Unmanned Aerial Vehicle
MA Wei,MA Da-wei,CUI Long-fei
(Nanjing University of Science and Technology, Nanjing 210094,China)
In order to verify the boosting rocket performance of a unmanned aerial vehicle (UAV), this paper establishes the three-dimensional solid and finite element models of UAV launching system and uses the explicit dynamics method to carry out the dynamics simulation of UAV finite element model. From the simulation results, the energy balance relation ship is satisfied and the UAV motion characteristics meet its design requirements. This gives a certain reference to the UAV launching.
unmanned aerial vehicle (UAV); rocket booster launching; dynamics simulation
马威(1987-),男,河南周口人,硕士研究生,主要研究方向:兵器发射结构动力学。
TP391.9
B
1671-5276(2014)02-0091-03
2013-01-24