序贯抗差估计在旋转调制陀螺寻北中的应用*
2014-07-18王成宾
管 斌, 王成宾
(1.信息工程大学 地理空间信息学院,河南 郑州 450052;2.地理信息工程国家重点实验室,陕西 西安 710054;3.西安测绘研究所,陕西 西安 710054)
序贯抗差估计在旋转调制陀螺寻北中的应用*
管 斌1,2,3, 王成宾1,2,3
(1.信息工程大学 地理空间信息学院,河南 郑州 450052;2.地理信息工程国家重点实验室,陕西 西安 710054;3.西安测绘研究所,陕西 西安 710054)
基于序贯抗差估计方法针对简化了的旋转调制陀螺寻北仪输出信号进行了寻北仿真研究。介绍了该型寻北仪的基本原理,在经典充贯平差的基础上,结合抗差M估计的原理,得到了序贯抗差估计的计算流程与公式。将寻北仪输出信号划分为2个阶段,对上述方法进行了仿真应用。仿真结果表明:通过该算法所得寻北结果误差均值与标准差均优于其它算法。
旋转调制; 寻北仪; 序贯平差; 抗差估计
0 引 言
寻北仪可提供方位基准,在军事和民用领域都有重要用途[1]。在地球上纬度 75°以下的任何地方都可以用它来确定出设站点的真北方向。寻北仪可以用于精密定向,在大地测量、工程测量和军事测量中有重要应用,在地下工程如隧道、地铁、矿山工程测量中更为重要。
方法上,寻北仪多采用二位置法和多位置法,文献[1~3]介绍了上述方法,并指出了这些方法很难达到较高精度、转位机构工程实现困难等不足,给出了由1只陀螺、2只加速度计和1个旋转台为主体,利用动态旋转调制寻北原理而构成的寻北方案。由文献[1,2],寻北精度主要受陀螺漂移变化的影响,该方案是降低陀螺仪漂移,提高同等指标陀螺仪寻北精度的一种行之有效的方法;通过旋转调制,陀螺仪中与时间呈一次方关系的陀螺漂移被抑制成1倍,陀螺等效精度能提高5~30倍。
由上,旋转调制陀螺寻北方案是一种较为理想的寻北手段,其寻北精度主要受陀螺漂移变化的影响。文献[4]通过对陀螺信号的频谱分析,设计了一种低通滤波器对陀螺信号进行滤波,来消除陀螺的高频噪声,再根据滤波后的数据得到寻北结果,这种方法的不足之处在于整个数据过程根据采集数据进行后处理,不具有实时性。文献[1]与文献[2]分别采用递推最小二乘法与卡尔曼滤波算法来递推解算方位角,但是没有考虑陀螺随机漂移变化中可能存在的粗差对寻北结果的影响。
本文将序贯抗差估计方法应用于旋转调制陀螺寻北中,以期能够通过抗差估计获得实时的、高鲁棒性的寻北结果。
1 基本原理
1.1 寻北原理
采用动调陀螺仪和石英加速度计构成惯性测量单元,惯性测量单元在电机的驱动下以恒定的角速度连续旋转,嵌入式计算机系统同时采集陀螺仪敏感轴和2只加速度计的数据,解算出北向方位角。
设测点地理纬度为L;台体的俯仰/横滚/航向角分别为θ,γ,φ。惯性测量单元在转台的驱动下旋转时,陀螺敏感轴的瞬时角位置为α=Ω·t+φ,其中,Ω为台体转速,φ为初始相位,陀螺敏感轴感测到的角速度为[2]
ωg=-[(-cosγsinφ+sinγsinθcosφ)cosL- sinγcosθsinL]ωiesinα+(cosθcosφcosL+ sinθsinL)ωiecosα.
(1)
它与惯性测量单元的姿态角、航向角、陀螺敏感轴相对台体的旋转角及地理纬度有关,其中,姿态角(θ,γ)可利用加速度计测量值(fmx,fmy)在台体坐标系上的投影变换计算得到,即经x轴、y轴上的比力为
(2)
(3)
当台体以Ω恒速旋转时,陀螺敏感轴感测的角速度值为随时间t变化的初始相位为φ的余弦信号。由式(1)~式(3)可知,若能精确连续测量出多个位置上的fbx,fby,ωg,则可以解算出台体的姿态角θ,γ,偏北方位角φ及当地纬度L。
为使分析简单,设转台台面已调节到水平,即姿态角θ,γ为零时,则式(1)可简化为[2,5]
ωg=ωiesinφcosLsinα+ωiecosφcosLcosα=ωiecosLcos(α+φ)=ωiecosLcos(Ωt+φ).
(4)
1.2 序贯抗差M估计原理
设观测方程为
Vk-1=Ak-1Xk-1-Lk-1,
式中Lk-1为第k-1期观测向量,Ak-1为nk-1×u维设计矩阵;Vk-1为残差向量,观测噪声的方差矩阵为∑k-1,相应的权矩阵为Pk-1;Xk-1为未知参数向量Xk的估计向量。
上述观测方程的模型解为
新增第k期观测量Lk,其权矩阵为Pk。令Ik=Lk-Akk-1,由最小二乘原理可以推求
(5)
(6)
Q=Q-KkAkQ.
(7)
单位权重误差为
(8)
其中,t为必要观测数
(9)
式(5)~式(7)即构成了序贯平差的计算公式,式(8)与式(9)构成了单位权重误差的序贯计算式。
当观测数据误差较大或出现所谓粗差干扰时, 用经典最小二乘方法往往得不到正确的解估计,需要用现代抗差估计理论来解决。应用了抗差估计的最小二乘法与经典最小二乘方法的根本区别是观测数据可以不只服从同一分布, 而一般是符合实际的受污染的正态分布[6]。

(10)
其中,|vi|=vi/σ,σ近似为单位权重误差。

2 仿真计算与分析
仿真产生旋转调制条件下的陀螺输出,俯仰角与横滚角均设为0°。当地纬度为30°,转台转速为5 r/min,根据某型光纤陀螺的性能(静态测试数据陀螺漂移稳定性0.15°/h),仿真数据中均匀地加入零均值白噪声作为陀螺漂移。在此基础上,每隔2.5 s加入1.2°/h、每隔25 s加入3°/h的粗差,以期与未加入粗差的结果进行比较分析,所加入陀螺信号误差如图1所示。陀螺信号的更新率为25 Hz,仿真时长为4 min(4 min为对应寻北仪的一般时间响应需求[2])。

图1 陀螺随机漂移仿真信号Fig 1 Simulation signal of random drift of gyroscope
采用如下4种方案进行寻北过程的解算:1)应用经典序贯平差算法寻北(RLS);2)应用经典序贯平差算法加先验信息检验的方法寻北(RLS+Test);3)应用序贯抗差估计算法寻北(RLS+Ro);4)应用基于抗差初值的序贯抗差估计算法寻北(Ro+Ro)。
方案(2)是在方案(1)的基础上,以方案(1)得到的参数估计值及其相应的单位权重误差,对观测值首先进行一次粗差检验并剔除含有粗差的观测值后,再进行序贯平差的方法。
方案(3),(4)的计算流程分为两阶段,第一阶段共96 s(转台前8次旋转),后为第二阶段。首先根据第一阶段的采样数据进行序贯平差估计得到一组参数值和相应的单位权重误差。从第二阶段的第一个观测值开始,使用1.2节所述方法进行参数的求解(本文IGGIII权函数选用的参数为k0=1.2,k1=2.7)。方案(3)不同于方案(4)之处在于,方案(4)选用利用第一阶段平差结果得到中位数作为抗差估计单位权重误差的初值[8]。有粗差条件下,由4种方案进行寻北过程中方位角误差大小如图2所示。
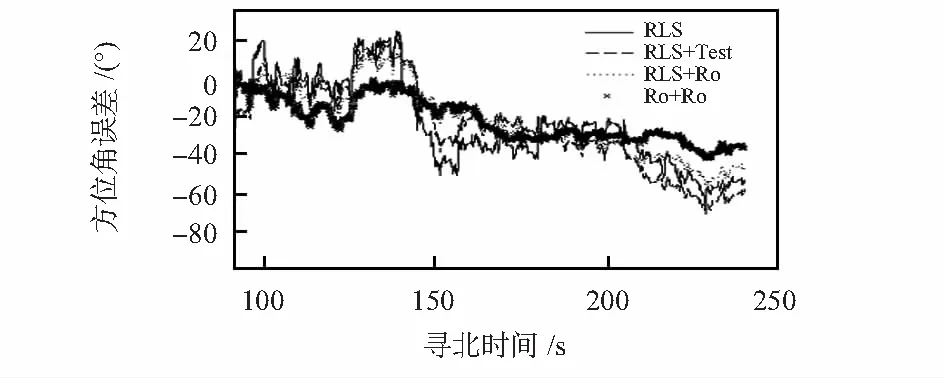
图2 含有粗差条件下寻北过程Fig 2 North seeking process containing gross error
将寻北过程的最后0.5 min寻北结果作为判断各方案优劣的依据,无粗差条件和有粗差条件下寻北过程最后0.5 min的方位角误差水平统计数据分别如表1、表2所示。
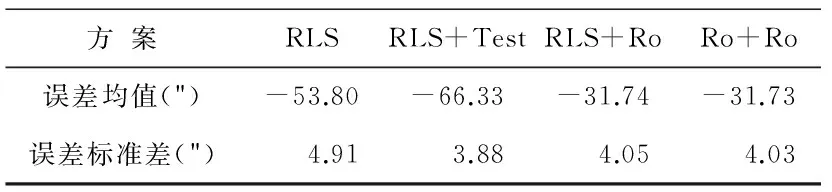
表1 无粗差条件下寻北结果统计Tab 1 Statistical of result of north seeking without gross error
分析上述计算结果可以看出:有粗差存在条件下,利用方案(4)得到的寻北结果优于其它3种方案,误差均值较小
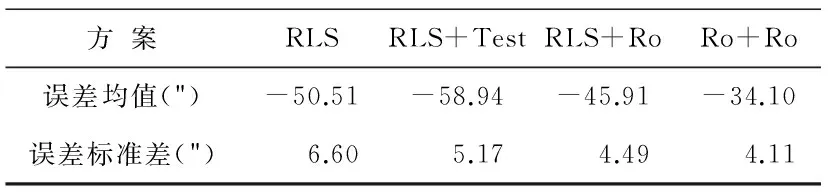
表2 有粗差条件下寻北结果统计Tab 2 Statistical of result of north seeking with gross error
且寻北过程平稳、起伏不大,是较为理想的数据处理方案;无粗差条件下,方案(4)得到的结果与方案(3)基本一致;方案(3),(4)采用抗差算法,结果优于未采用抗差算法的方案。
3 结 论
旋转调制陀螺寻北方案是一种较为理想的寻北手段,已有算法中还存在着不具备实时性或抗粗差能力不足等缺点。针对上述问题,本文设计了基于序贯抗差M估计原理的实时解算寻北算法,详细地描述了算法的执行过程并通过4种方案的比较对算法进行了仿真验证。仿真结果表明:本文所应用的基于序贯抗差估计的两阶段实时寻北方案具有较好寻北性,一次寻北的误差均值与标准差均优于文中的其它方案,可以考虑应用至实物旋转调制陀螺寻北仪之中。
[1] 徐海刚,郭宗本.旋转式光纤陀螺寻北仪研究[J].压电与声光,2010,32(1):38-41.
[2] 白云超,李学琴,马小辉,等.采用旋转调制技术的高精度陀螺寻北方案[J].中国惯性技术学报,2010,18(4):421-424.
[3] 白云超,马小辉,刘思伟,等.基于旋转调制技术的自动陀螺寻北仪关键技术研究[J].测绘科学与工程,2010,30(1):16-18.
[4] 徐建华,谢 玲,高亚楠,等.旋转调制式寻北仪滤波技术研究[J].北京理工大学学报,2005,25(8):718-721.
[5] 白云超,刘思伟,田育民,等.基于旋转调制技术的自动陀螺寻北仪方案设计[J].测绘技术装备,2010,12(2):43-44.
[6] 李 平,许厚泽.地球物理抗差估计和广义逆方法[J].地球物理学报,2000,43(2):232-240.
[7] 杨元喜.自适应动态导航定位[M].北京:测绘出版社,2006.
[8] 杨 玲,沈云中,楼立志.基于中位参数初值的等价权抗差估计方法[J].测绘学报,2011,40(1):28-31.
Application of sequential robust estimation in rotation-modulated gyro north seeker*
GUAN Bin1,2,3, WANG Cheng-bin1,2,3
(1.Institute of Geography Spatial Information,Information Engineering University,Zhengzhou 450052,China;2.State Key Laboratory of Geo-information Engineering,Xi’an 710054,China;3.Xi’an Research Institute of Surveying and Mapping,Xi’an 710054,China)
Research is carried out on output signal of simplified rotation-modulated gyro north seeker based on sequential robust estimation.Fundamental principle of the north seeker is introduced,on the basis of classical sequential adjustment method,computation procedures and formula of sequential robust estimation is deduced combining the theory of robust M estimation.Divide output signal of north-seeker to two parts,above method is simulated and applied.Simulation result shows that the mean error and standard error of north seeking result gained by the deduced algorithm is better than other algorithms.
rotation-modulation; north-seeker; sequential adjustment; robust estimation
10.13873/J.1000—9787(2014)12—0158—03
2014—04—21
国家自然科学基金青年科学基金资助项目(41004080,41304022)
P 207
A
1000—9787(2014)12—0158—03
管 斌(1988-),男,江西九江人,工程师,从事惯性技术研究。