激光测距传感器在车辆宽高检测中的应用
2014-07-18冀小平
吕 彬, 冀小平
(太原理工大学,山西 太原 030024)
应用技术
激光测距传感器在车辆宽高检测中的应用
吕 彬, 冀小平
(太原理工大学,山西 太原 030024)
为提高高速公路车辆超宽、超高治理工作效率,智能车辆宽高检测系统的应用也越来越广泛。由于检测系统对车辆后视镜最宽值的误判断,导致人工复测频繁、超限站车辆通行缓慢。针对上述缺陷,提出了利用广义回归神经网络的拟合能力判断产生最宽值原因的方法。经实验证明:该方法能有效去除检测过程中由后视镜产生的最宽值,提高准确度与过车效率。
宽高检测; 激光测距传感器; 广义回归神经网络
0 引 言
随着我国大力构建快速公路交通网络,公路运输得到了前所未有的发展。受经济利益的驱使各种超限车辆也频频违章上路。治理超载、超宽、超高车辆也迫在眉睫。在超载车辆的治理中,静态、动态汽车衡的使用有效地遏制了超载车辆上路。由于以往超宽超高车辆的治理一直采用人工方法检测,导致效率低下[1]。为提高检测效率,智能超限检测仪器投入了使用。但是现行的部分智能宽高检测系统不能有效地滤除车辆后视镜对车辆宽度的影响造成误判断,不仅需要人工复检测量宽高,还造成了超限站放行缓慢、超限车辆聚集[2]。
针对上述缺陷,本文利用神经网络优秀的预估逼近能力,提出以广义回归神经网络(general regression neural network,GRNN)为基础求出车辆最值落入判别范围的方法消除车辆后视镜对车宽检测的影响。
1 车辆后视镜判别方法
利用GRNN查找出被测车辆通过宽高检测仪时,产生的最宽值处于采样时间序列中的位置,并由检测阈值判断最值是否由车辆后视镜产生。以达到消除由于后视镜产生的误判断。具体流程图如图1所示。
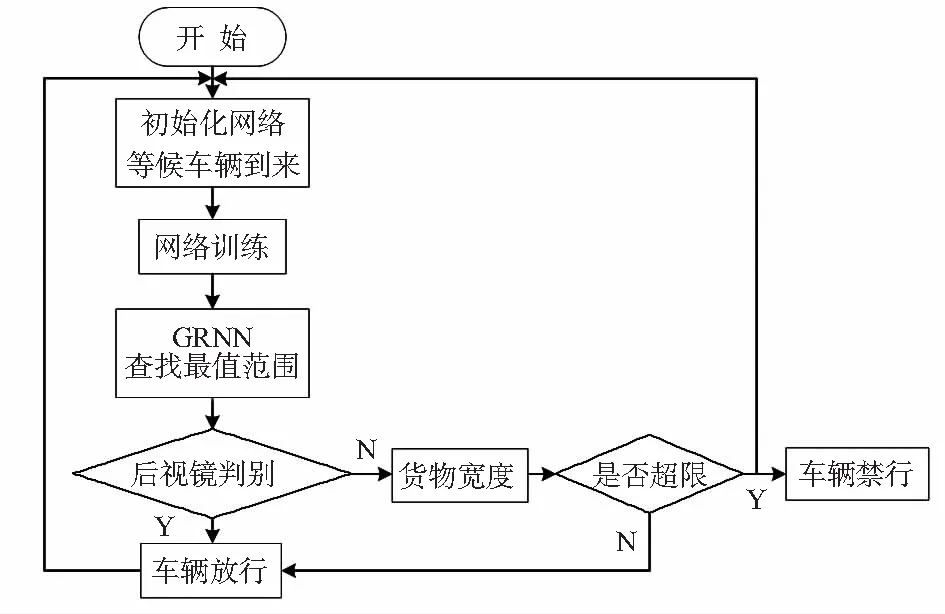
图1 判别方法流程图Fig 1 Flow chart of discrimination method
1)系统初始化,等待车辆到来。
2)以车辆检测数据作为样本完成对网络的训练。
3)利用GRNN求出最值落入采样值的范围。
4)判定最值区域是否超出检测阈值,是,则认为最值是由车辆后视镜产生;否则,认为车辆宽度最值不是由后视镜产生。将最值与宽高限制值比较,结果计入过车数据库,并重复步骤(1~4)。
2 宽高仪传感器检测原理
宽高检测仪采用激光测距传感器。激光以其高亮度、高方向性、高单色等特点,被广泛应用于各种测量领域中。激光测距相比红外测距、超声波测距等方式,具有速度快、实时性强、获取数据精度高等特点。激光测距等技术已在汽车防撞、建筑或空地安全监护、轨道交通领域得到了广泛的应用[1]。本系统选用德国SICK公司生产的LMS型双脉冲激光测距传感器。
LMS激光传感器是一种户外型非接触式的高精度、高解析度外部传感器,其工作原理是基于对激光束飞行时间的测量,按一定间隔发出激光束脉冲,通过定时器计算发射脉冲和接收脉冲之间的时间间隔测得与被测物体之间的距离[2~4]。
智能车辆宽高检测系统通过对车辆进行连续动态扫描,采集车辆外型轮廓信息,并将采集实时数据传给控制单元,控制单元通过处理、分析、计算采样数据,得出车辆实际的宽高值。宽高仪原理如图2所示。
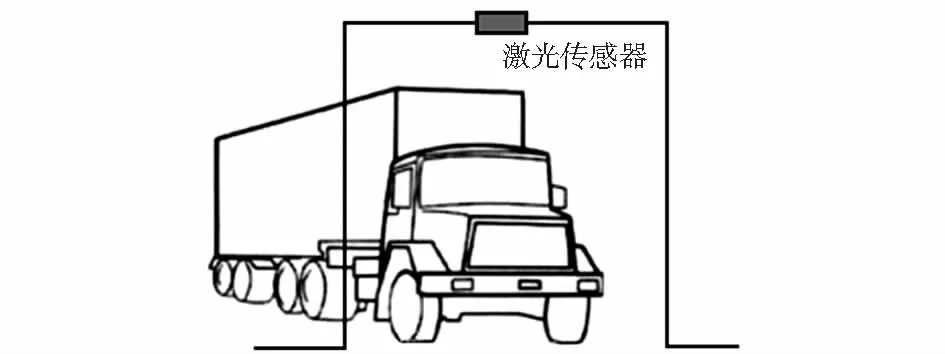
图2 宽高仪原理图Fig 2 Principle diagram of width and height instrument
3 GRNN
GRNN是径向基函数(radial basis function,RBF)网络的一种变形形式。GRNN建立在非参数回归的基础上,以样本数据为后验条件,执行Panrzen非参数估计,依据最大概率原则计算网络输出。GRNN以RBF为基础,具有良好的非线性逼近能力,与RBF网络相比训练更为方便,尤其适合解决曲线拟合问题[5]。
3.1 网络结构
GRNN由输入层、隐含层、加和层、输出层构成,如图3所示。
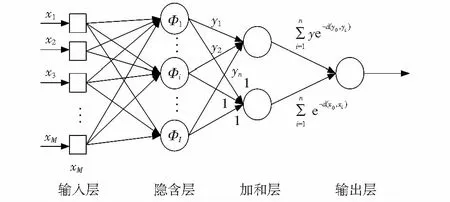
图3 广义回归神经网络结构Fig 3 Structure of GRNN
输入层接收样本的输入,神经元个数等与输入向量的维数。隐含层是径向基层,神经元个数等与训练样本个数,基函数一般采用高斯函数,第i个神经元的中心向量为xi。加和层神经元分为两种,第一种神经元计算隐含层各神经元代数和,称为分母单元;第二种神经元计算隐含层神经元的加权和,权值为各训练样本的期望输出,称之为分子单元。输出层将加和层的分子单元和分母单元相除,即得到y的期望输出
(1)
网络的训练过程只需要完成对σ的一维寻优即可。但由于网络并不知道样本数据的概率分布,因此,不能从样本中求得理想的光滑因子σ,故而这里采用一维寻优的方式来求取。具体步骤如下:
1)设定一个平滑因子σ。
2)从样本中取出一个测试样本,其余作为训练样本,用于构建网络。
3)用构建的网络对该样本做出测试,求得绝对误差值。
4)重复第二步和第三步,直到所有的样本都曾被设置为测试样本,定义目标函数以求出平均值
(2)
这样,就求得了在给定σ值下的误差值,可以用此目标函数作为衡量σ性能的标准。
3.2 判别阈值
判别范围的设定依照卡车车头所占车身比例设定,一般的超限车辆分为长头卡车和平头卡车。由于平头卡车的后视镜与车辆前沿距离较长头卡车要近,所以,选取长头卡车车头前沿到车辆后视镜的长度占整个车身长度的比例作为超宽值检验范围的依据。
在我国半挂车车身长度为13 m,2008年9月,新规定厢式的半挂车车身可达到14.6 m。牵引车头在独立状态下7~8 m[6]。由于考虑半挂车转弯时候的回旋半径车头和车厢之间有1.5 m左右的空隙。所以,在整车长度17.5 m的情况下认为长头车车头所占比例阈值ε为17 %。
3.3 数据检验
以山西某收费站宽高仪获取整车过车数据为样本,分别取未超限车和超限车过车产生过车宽高数据X1=783组,X2=801组。在Matlab中利用工具箱函数利用net=newgrnn(P,T)函数进行最值定位。P矩阵为一维矩阵的车宽数据,目标矩阵T为数据采样数据序列号[7]。利用X=sim(net,ymax)求出最值采样序列号。若x/X<ε,则认为最值Ymax为车辆后视镜最宽值。
由图4可见车辆最高值y1=2.54 m落在了整个采样周期中的x=72,很明显可以判断出最宽值由车辆后视镜产生,最值数据不计入超宽检测范围。
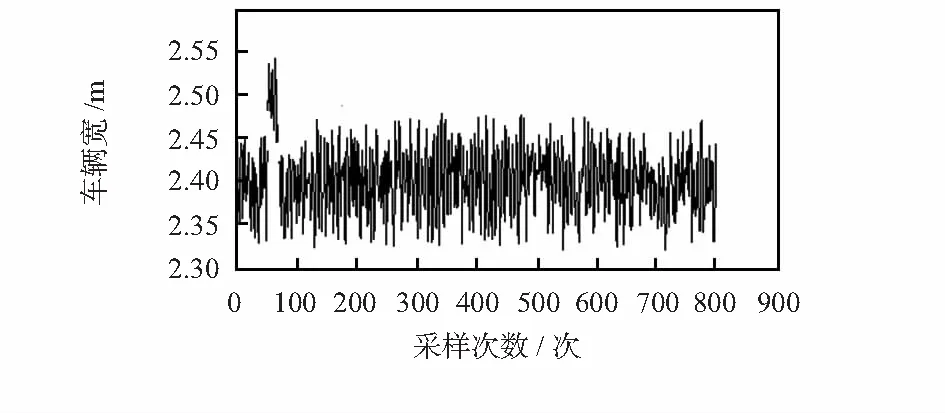
图4 未超宽车宽度数据采样波形Fig 4 Sampling waveform of width datas of normal vehicle
由图5可见车辆最高值y2=2.57 m落在了整个采样周期中的后半段x2=603,可以判断出最宽值由车辆所载货物产生,最值数据计入超宽检测范围,且超出国家车辆宽高管理规定,依法劝返禁止上高速。
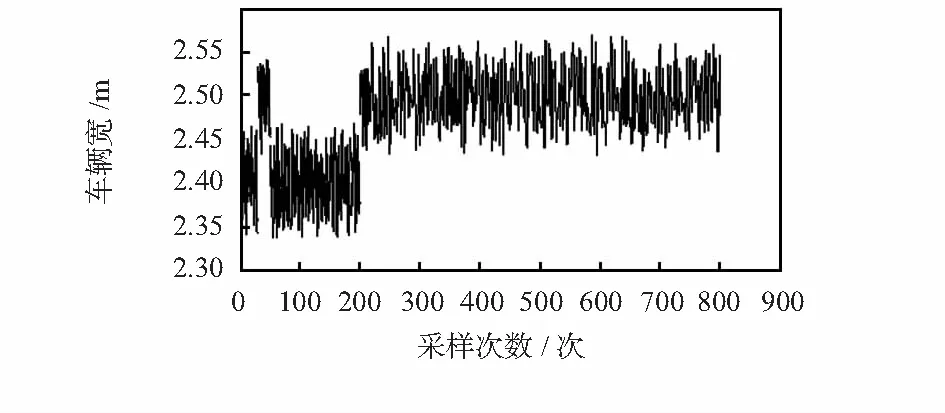
图5 超宽车宽度数据采样波形Fig 5 Sampling waveform of width datas of ultra wide vehicle
4 结 论
经实践数据检验,基于GRNN拟合方式的传感器判断方法可以有效地识别车辆宽高检测中车辆最宽值是否由车辆后视镜产生。系统能将所载货物宽度与后视镜宽度区别开来,大大降低了宽高检测中的误判断,也省去了人工复检造成的人力浪费,减缓了收费站车流量压力。
[1] 禹琳琳.基于激光测距技术的车辆宽高检测系统的设计[J].电子设计工程,2011,19(10):103-106.
[2] 谢志鹏,卞春江,孟 新.基于FPGA的激光测距控制系统设计[J].微计算机信息,2009,25(3/2):187,190-191.
[3] 叶 迪.移动机器人基于激光测距的三维场景重构[D].大连:大连理工大学,2008.
[4] SICK Company in Germany.LMS laser measurement systems opera-ting instructions[EB/OL].[2014—02—07]. http:∥www.sick.com.
[5] 刘君尧,邱 岚.基于径向基函数神经网络的函数逼近[J].大众科技,2009(9):19,39.
[6] 郑 丽,车辆外形检测关键技术研究[D].南京:南京理工大学,2010.
[7] 李 萍,曾令可,税安泽,等.基于 Matlab的BP神经网络预测系统的设计[J].计算机应用与软件,2008,25(4):149-150.
Application of laser ranging sensor in detecting of width and height of vehicle
LÜ Bin, JI Xiao-ping
(Taiyuan University of Technology,Taiyuan 030024,China)
In order to improve extra-width,ultra-height of highway vehicle management work efficiency,width and height detection system of intelligent vehicle is more and more widely applied.Because of misjudge of detecting system on the widest value of vehicle rearview mirror,leading to artificial frequent repetition and overrun station traffic is slow.Aiming at above defects propose method using fitting ability of generalized regression neural network to estimate the reason of the maximum width value generating.Experiments show that the method can effectively remove the widest value caused by rear view mirror in process of testing,improve the accuracy and efficiency of traffic.
width and height detecting; laser ranging sensor; general regression neural network(GRNN)
10.13873/J.1000—9787(2014)12—0152—03
2014—05—15
TP 274
A
1000—9787(2014)12—0152—03
吕 彬(1987-),女,山西太原人,硕士研究生,主要研究方向为数字图像处理。