分立式激光位移传感器设计*
2014-07-18韩星程王黎明
韩星程, 王黎明, 王 飞
(中北大学 电子测试技术国家重点实验室, 山西 太原 030051)
分立式激光位移传感器设计*
韩星程, 王黎明, 王 飞
(中北大学 电子测试技术国家重点实验室, 山西 太原 030051)
针对制式激光位移传感器不能满足复杂检测环境下几何尺寸检测需求的问题,提出了分立式激光位移传感器的设计方法。此方法可根据检测要求,将激光源与光电探测器分立布置,依据激光三角测距等原理确定系统分立设置的参数,并通过数据采集与标定建模等手段实现激光位移测量的功能。最后通过一设计实例,验证了该方法的可行性。
激光位移传感器; 复杂检测环境; 分立式; 三角测距原理
0 引 言
几何尺寸测量在工业化生产和自动检测等领域都有着非常重要的作用。激光位移传感器作为一种非接触式位移检测仪器,因其高灵敏度、高精度以及快速与实时性等优点被广泛地应用于各种几何尺寸测量系统中[1]。但伴随着科学技术与机械制造工艺的发展,仪器设备的小型化、精密化程度日益增加,且在工程实践中被检测目标常常处于其他工件内部,所处环境空间狭小不利于传感器的放置与摆设。现有的标准激光位移传感器,采用透镜光学系统结构往往比较固定,导致于其大小外型不容易做过多改变来适应于各种检测环境的需要。
针对上述工程需求,本文提出了一种分立式激光位移传感器的设计方法,将传感器激光源与光电探测器分立设置,并使用小孔代替传统激光位移传感器中的透镜光学系统,根据检测要求,系统设计其布置参数,并通过系统标定和数据处理,即可实现位移的高精度、非接触测量。
1 激光三角测距模型建立
在非接触式位移测量中激光三角测量法已经被广泛的使用,其中按照光源的入射方式分为直射式与斜射式两种,本设计使用小孔作为传感器的成像光学系统,测量原理如图1所示[2,3]。
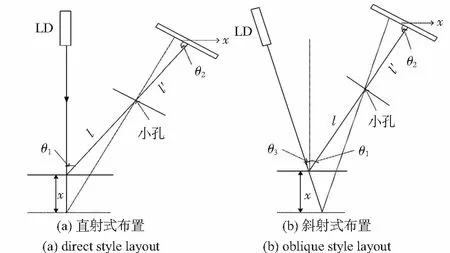
图1 三角测距法原理图Fig 1 Triangulation principle
对于直射式系统激光器发出激光在待测物体表面形成光斑,光线在空间中散射被小孔接收,并在感光面上成像。当待测物体表面沿激光入射方向移动时,产生位移x,从而引起感光面上小孔所成的像的位移,记为x′。根据平面几何相似三角形关系可得

(1)
其中,θ1,θ2分别为小孔所在平面的法线与入射光线及感光面的夹角,l,l′分别为小孔所在平面法线方向离测量基本面与感光面的距离。取“+”表示被测平面向测量基本面上方移动,取“-”则相反。
对于斜射式系统同样可有平面几何相似三角形关系得到

(2)
这两种入射系统对于不同检测环境各有优劣,标准式激光位移传感器只能采用其中一种入射方法进行测量,但对于分立式传感器系统就可以根据待测表面的粗糙程度、反射系数以及摆设方便等因素综合考虑而在这两种方式中灵活选用。
2 传感器系统重要参数与主要器件的确定
采用光源与光电探测系统的分立式设计极大地增加了传感器在使用中应对复杂检测环境的灵活度,但因为透镜成像系统需满足一定的成像条件不利于分立式传感器系统的设计,所以,本设计中采用了更加灵活的小孔成像系统作为探测系统的光能接收装置,并针对分立式设计对基于小孔的激光位移传感器系统重要参数和主要器件的选定方法做了进一步的研究。
2.1 系统参数确定方法
在基平面上确定一系列重要参数是三角法计算位移的基础,在透镜光学系统激光位移传感器中,l,l′的选定是根据透镜近轴成像系统的高斯公式确定;θ1,θ2的确定则是必须满足Scheimpflug条件[4]而决定的。在小孔激光位移传感器系统中,整个的参数选取方法会有很大的不同。
对于θ1,θ2的选定,θ1越小,能够接收到的光信号越强,有利于检测,但是当其变小时,检测的范围也会变小。所以,将θ1选定时要根据检测环境、激光器功率以及检测范围综合选定;因为使用小孔系统不需满足Scheimpflug条件,所以,为了便于设备摆设和计算,可将θ2取值为90°。θ3的选定则要根据实际检测需要进行选取。
对于物距l、像距l′的选定,与选用的光电探测器有着重要的关系。因为小孔系统光斑所成像的大小可以通过物距与像距选定来调节,所成像越小,测量精度越高;但像如果过小,其能量也会降低,导致感光面接收到的光信号很微弱,以至于系统的信噪比减小,甚至于直接导致感光面无法感知到光信号,使系统不能使用。所以,在对l与l′进行选定时,应在光电探测器敏感范围内,根据小孔成像原理进行计算得出,光斑成像原理如图2所示。
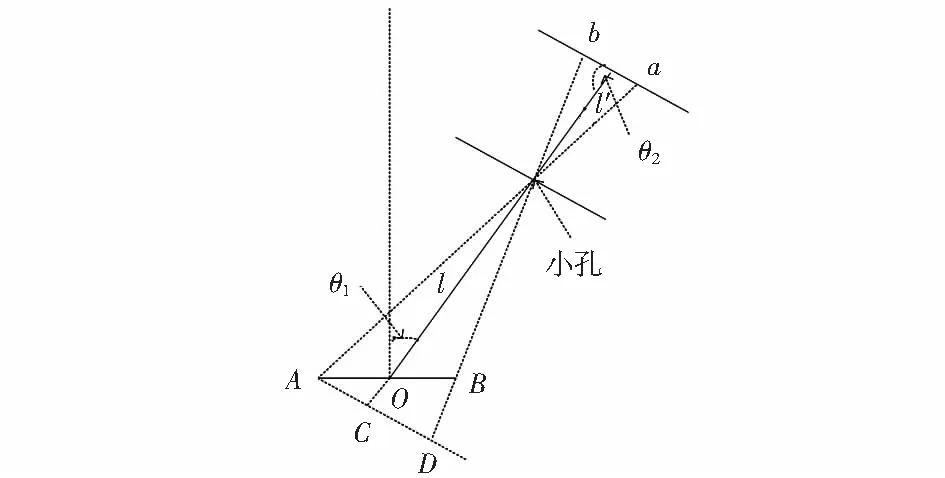
图2 小孔系统光斑成像原理图Fig 2 Principle diagram of pinhole system facular imaging
AB为被测物面上光斑,ab为感光面上光斑所成像,θ2=90°,根据相似三角形关系可得

(3)
根据所选激光器、感光元件基本参数确定|AB|,|ab|,带入计算出l与l′的关系。再根据光电探测器的检测能力范围与偏角θ1确定基本面位置,就可计算出l,l′。
通过上述方法可得到激光三角测距的所需参数,再通过光电探测器的处理就可确定x′,将其带入式(1)或式(2)就可求得待测平面位移x。
2.2 光源与光电探测器选择原则
光源的选择需按照测量场合的实际情况和测量要求来确定,在分立式测量系统中,偏角θ1和光电探测器的位置都会根据检测环境的不同而变化,所以,在选择作为光源的激光器时,也需按照测量环境的不同而变化。在θ1偏大或物距较大时,光电探测器接收到的光能量会变少,导致信噪比降低,影响测量结果,这种情况下需使用功率较大的激光器,且在需要调小感光面上光斑像尺寸以增大系统测量精度时,也需酌情使用大功率激光器,保障光斑像缩小后的能量强度或者在激光器出光口放置透镜,使照射到检测面上的光斑能量不变,而尺寸变小。
激光位移传感器中光电探测器元件有多种选择,如CCD,CMOS,PSD以及四象限光电探测器等。对于分立式传感器系统,所选用的光电探测器则需根据不同的检测环境,对测量范围、感光面尺寸以及分辨率等方面综合考量。选用探测器的测量范围除能保障其在工作空间内可接收到光能信号外,也是确定传感器系统测量基本面的重要参数,其感光面的尺寸则影响着测量的量程范围,而分辨率的大小更是直接决定系统精度的因素。
3 数据采集与系统标定[5~7]
根据选用光电探测器的不同,传感器系统的数据采集与系统标定方式也不尽相同。下面以较常被使用到的线阵CCD与PSD这两种光电探测器为例,对分立式系统的数据采集与系统标定方法进行简要说明。
线阵CCD是通过A/D转换和采集其每个像素点的电压信号来实现对成像于其上的光斑位移信息的获取。通过搭建外围控制和处理电路,实现对线阵CCD每个像素点的输出电压采集;再利用光能积分重心法等算法对电压数据进行处理,将光斑的光能重心用一个像素点来表示,并将其作为光斑的位置信息推导出光斑的位移量;最后对每个位移量和与其对应的光斑所成像的光能重心点位置坐标进行数学建模,求出其拟合曲线方程作为传感器系统的系统方程。
对于PSD通过处理板电路处理后,当光斑打到其上一个位置时都会对应输出一个电压值。通过对光斑在感光面上的位移与输出电压差之间的标定可以得出每变化一个单位电压值光斑在感光面上移动的距离,从而根据光斑在位移点时的输出电压与其在基本面时的电压差就能得出其在感光面上的移动距离,带入三角测量公式就可求得实际位移值。通过A/D转换与采集得到不同点时的电压输出与其实际位移值进行数学拟合,求出其拟合曲线方程即为传感器系统的系统方程。
4 设计实例
为验证分立式系统设计的可行性,针对一个量程为10 mm,精度要求为0.5 mm的位移测量需求,搭建了一种分立式激光位移传感器系统,对待测目标的位移信息进行检测和采集,并对数据结果进行了分析。
4.1 设计方法
在本设计中选用了感光面为1.3 mm×15 mm的PSD,使用垂直入射方法。对于l,l′的选定,因为PSD存在暗电流和外界杂散光的影响,PSD接收光功率的强弱直接决定了系统精度,如果接收光功率过低,会导致信噪比减小,系统测量精度降低,物光斑太小,被测物平面上的微小粗糙起伏将影响散射光场的分布,所以,选用的激光器功率和光斑面积不能太小[8]。但是由于PSD感光面本身的尺寸不大,如果在其上所成光斑像过大,则会严重影响系统测量精度,所以,需要利用小孔成像原理调节l,l′使得在PSD上所成像的尺寸可以保证测量需要。所用激光器光斑大小在(100±40)mm范围内可保证光斑直径为2 mm。将光斑利用小孔在感光面成像时直径缩小为1 mm,利用上述原理和所用PSD本身的敏感范围可得到小孔系统的物距与像距为l=38.61 mm,l′=22.58 mm。
系统角度参数可以根据检测环境需要、检测光强需要以及检测范围综合考虑确定。本文设计中根据待测面反射度、激光器功率及系统检测范围等因素,将θ1确定为30°;θ2在小孔系统中确定为90°;设计采用直射式系统,θ3不必考虑。
分立式系统中以上数据都是可以根据实际需求调整的,为了保证在复杂环境下检测平台的搭建需要,可以依照前文中所述的分立式激光位移传感器设计理论对小孔及光电探测器的位置、激光器选用功率等进行灵活调节。
4.2 实验结果分析
在对PSD进行标定后,得到光斑在感光面上每移动2.93 mm输出电压1 V。通过A/D转换采集得到PSD输出电压值,带入公式计算出位移值x数据如表1所示。
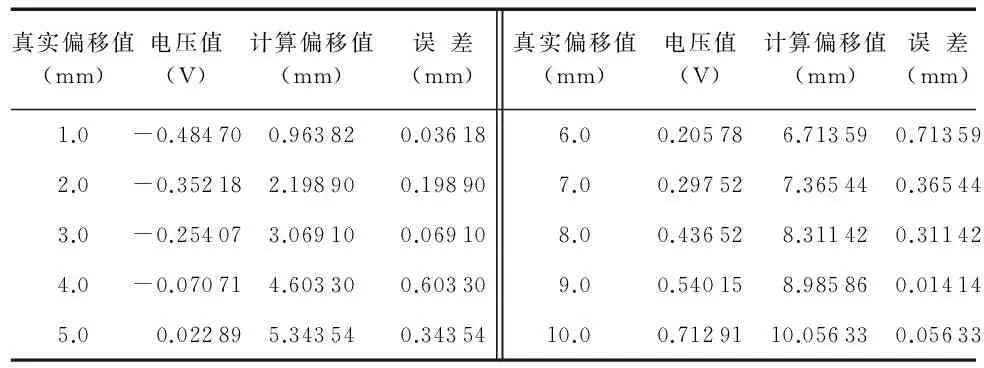
表1 位移量与PSD输出电压值数据表Tab 1 Displacement amount and PSD output voltage values
对上表数据利用最小二乘法进行拟合得到该传感器系统的系统方程为
y=7.682 7x+4.724 9,
(4)
式中x为电压值,y为偏移位移值,拟合曲线如图3所示。
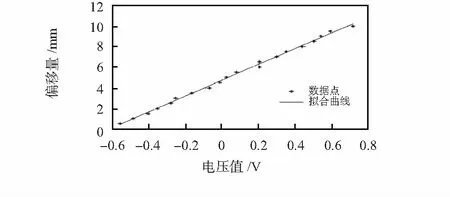
图3 拟合曲线图Fig 3 Fitting curve
实验结果表明:除去少数粗大误差点,该激光位移传感器系统可对量程为10 mm,精度要求为0.5 mm的检测工作提供准确的位移信息。当对精度有更高要求时,还要注意以下三个方面:1)选用光斑能量和大小合适的激光器,因为成像于感光面上光斑的大小和强度对PSD测量精度有着很大程度的影响,感光面上成像光斑越小,测量精度越高。根据式(3)可知,通过增大物距l′可减小光斑像的尺寸,但如果成像光斑过小,其能量也会变小,进而导致PSD无法有效获取位移信息,所以,需要选用光功率合适的激光器提供光能信号。2)选用分辨率更高的光电探测器元件,用以获取光斑像的微小位移信息。3)提高系统的机械精度,减小系统器件、光路的摆设误差。
5 结 论
本文在传统三角测距激光位移传感器的基础上,提出了分立式非标准激光位移传感器的设计方法,并通过实例设计,介绍了设计方法,验证了本方法的可行性。分立式激光位移传感器系统构造灵活,能够针对不同的检测环境快速实现,可应用于特殊环境几何尺寸检测的工程领域。
[1] Sirohi Rajpal S.Optical methods of measurement[M].NewYork:CRC Press,1999:56-70.
[2] 黄 睿.激光位移传感器及输出特性的研究[D].北京:北京交通大学,2010.
[3] 穆向阳,李 琳,汤 楠.激光位敏探测器在三角测量中的应用研究[J].西安石油大学学报,2004,19(5):43-46.
[4] 金国潘,李景镇.激光测量学[M].北京:科学出版社,1998.
[5] 王世峰.激光位移传感器数据采集技术[J].微计算机信息,2008,24(4):137-139.
[6] Nobuyuki Hasebe.Position linearity and resolution of large position sensitive silicon detector with a highly uniform thickness[J].Jpn J Appl Phys,1992,31(4):1191-1193.
[7] 靳 硕,杨宏海.激光位移传感器高速数据采集与处理系统设计[J].宇航计测技术,2010,30(6):1-5.
[8] 李旷野.基于PSD的高精度位移传感器的研究[D].长春:长春理工大学,2010.
Design of discrete laser displacement sensor*
HAN Xing-cheng, WANG Li-ming, WANG Fei
(Science and Technology on Electronic Test & Measurement Laboratory,North University of China,Taiyuan 030051,China)
Aiming at problem that format laser displacement sensor can not satisfy geometry size detection requirements in complex test environment,propose a design method of discrete laser displacement sensor.This method can discretely decorate the laser source and the photoelectric detector according to detection requirements,and set the parameters of the division set in the system on the basis of laser rangefinder principles,then realize function of laser displacement measurement through methods of data acquisition and calibration modeling.Finally,it verifies feasibility of the method through a design example.
laser displacement sensor; complex detection environment; discrete style; triangulation principle
10.13873/J.1000—9787(2014)12—0104—03
2014—05—05
山西省自然科学基金资助项目(2013011017—8)
TP 212
A
1000—9787(2014)12—0104—03
韩星程(1989-),男,山西文水人,硕士研究生,主要从事信息通信、信号处理的研究。