复合电源能量匹配与多目标模糊控制策略研究*
2014-07-18张炳力吴德新窦聪顾炎
张炳力 吴德新 窦聪 顾炎
(1.合肥工业大学;2.常州大学)
复合电源能量匹配与多目标模糊控制策略研究*
张炳力1吴德新1窦聪1顾炎2
(1.合肥工业大学;2.常州大学)
分析了复合电源纯电动汽车的电源结构和工作模式,依据纯电动汽车基本性能指标对复合电源进行了能量匹配,制定了能源安全约束,并基于此制定了多目标模糊控制策略。仿真结果表明,所提出的控制策略能够充分发挥超级电容的优势,可提升纯电动汽车续驶里程、合理分配复合电源功率及减小车速误差。
1 前言
随着环境污染、能源短缺的日趋严峻,发展零污染、低噪声、高效率的电动汽车已成必然趋势[1]。日益复杂的交通环境要求汽车频繁起动、加速、制动,此时需要动力电池能够承受充放电大电流,而这样会严重影响动力电池的使用寿命。储能元件超级电容拥有较高的比功率,能够快速充放电且循环寿命可达10 000次以上,因此,“动力电池+超级电容”结构的复合电源已成为克服单电源纯电动汽车续驶里程短、加速性能差的主要解决方案[1~3]。
目前,美国和日本等国已经将动力电池与超级电容组成的复合电源系统的研究和设计作为电动汽车研究的主攻方向之一。我国各研究机构也开始加大对蓄电池-超级电容复合电源技术的研究,但对电-电混合电源技术的研究多以仿真为主,少数有条件的研究机构也多是基于公交车系统的复合电源研究,所以研究基于纯电动汽车复合电源技术意义重大。
本文依据复合电源的具体结构以及纯电动汽车行驶时电源系统工作模式,对复合电源进行能量匹配,并采用多目标模糊控制方法有效管理两电源在整车行驶中的能量输出,以提高复合电源纯电动汽车的续驶里程。
2 复合电源结构与工作模式
2.1 复合电源结构
复合电源由动力电池和超级电容并联组成,若要充分发挥超级电容比功率大、快速充放电的特性,需在两电源之间加一个DC/DC以平衡两电源电压[4]并管理两电源工作。本文研究的纯电动汽车的复合电源与动力系统结构如图1所示。
如图1所示,超级电容通过双向DC/DC变换器与动力电池并联,这种结构能够更好地匹配两电源的工作电压,其综合考虑了控制的便利性与结构的实用性。
2.2 复合电源工作模式
复合电源的工作模式如图2所示。在车辆起动、急加速、爬坡工况下,车辆所需的瞬时功率较大,此时超级电容将提供瞬间大电流,以降低动力电池的工作负荷,同时快速满足车辆的行驶要求;在车辆低速、巡航、缓慢加速工况下,车辆需求的功率较低,此时动力电池提供整车行驶所需的能量;在再生制动工况,超级电容利用其快速充电的性能回收更多的制动能量。
3 参数匹配与安全约束的制定
为获取复合电源的最大效率,需依据车辆的行驶功率需求对双电源的功率、能量输出做合理的分配,并依据动力电池与超级电容的自身特性设置能量安全约束,以确保复合电源的安全使用。
3.1 复合电源能量匹配
依据整车的性能指标,通过式(1)来计算整车对动力电池的能量需求:
式中,W为动力电池所需总能量;D为动力电池SOC的工作范围,一般取0.2~0.9;η为纯电动汽车动力系统机械效率,取0.92;m为整车质量;g为重力加速度;f为滚动阻力系数;CD为空气阻力系数;A为车辆迎风面积;P辅为车辆照明、多媒体等的消耗功率;ua为车速;S为理论续驶里程。
作为辅助电源的超级电容主要应用于起步、急加速等大功率需求的工况,因此超级电容能量与功率需求应满足以下关系[5]:
式中,Pclmin为驱动电机峰值功率与额定功率之差;ncp为超级电容单体组并联数;ncs为超级电容单体组串联数;C为超级电容的容量;Ucmax为超级电容最大工作电压;Ucmin为超级电容最小工作电压;ta为车辆加速时间。
复合电源在遵循以上能量、功率约束的基础上,在车辆整个行驶过程中还应满足以下约束:
式中,P、E为车辆行驶中的功率和能量需求;Pb、Eb分别为动力电池的比功率和比能量;Pc、Ec分别为超级电容的比功率和比能量;N1、N2分别为动力电池和超级电容的单体数。
3.2 安全约束
3.2.1 动力电池放电电流
相关资料表明,动力电池(锂离子电池)的放电倍率在2.5 C[5]以上时对其寿命、容量影响较大,因此,用于电动汽车的锂离子电池的成本-寿命区域应设置为0.7~1.2 C。
3.2.2 动力电池单体电压
动力电池由多块电池单体串、并联组成,在放电过程中,电池单体放电的一致性是制约电池最大能量输出的关键。对于磷酸铁锂电池,当单体电压小于2.5 V时动力电池组停止能量输出。
3.2.3 超级电容高效电压范围
超级电容器的存储能量与其电压、容量关系[6]为:
由式(5)可知,当超级电容器端电压是额定电压时,E1=0.5UC;当端电压为额定电压的1/2时,E2=0.25UC,即超级电容SOC为0.25。此时超级电容SOC过低,输出能量的效率很低,因此,在实际运行中,应确定超级电容的高效电压区域,即额定电压的60%以上的电压区域。根据上式由额定电压的60%反推出超级电容的最低单体电压值,在此最低值以上的区域运行即可确保超级电容高效、安全运转。
4 多目标优化模糊控制策略的制定
在复合电源的设计研究中,对于其功率分配多使用功率门限作为控制策略[1~4],但这种控制策略无法充分发挥超级电容“削峰填谷”的优势,从而影响复合电源的性能。
由于整车控制系统的变量较多,往往难以正确描述系统的动态。虽然传统的控制理论对于明确系统有较强的控制能力,但对于整车控制系统则无能为力,因此以模糊数学来处理这些控制问题。模糊控制建立在人工经验基础之上,是利用控制法则来描述系统变量间的关系,不用数值而用语言式的模糊变量来描述系统。相对于传统控制技术,模糊控制具有无需知道被控对象的数学模型、易于对不确定系统或非线性系统进行控制、对被控对象的参数变化有较强的鲁棒性、对外界的干扰有较强的抑制能力等特点。
因此,依据模糊控制理论建立多目标优化模糊控制策略,合理高效地对复合电源进行功率分配,并充分利用超级的优势以减小目标车速与实际车速的误差。
4.1 模糊控制器的建立
在软件MATLAB中建立4输入2输出的多目标优化模糊控制器,如图3所示。图3中,输入为整车需求功率P-req、动力电池SOC-b、超级电容器SOC-c、目标车速与实际车速误差Vm-Vs,输出为动力电池输出功率分配因子K-b与超级电容输出功率分配因子K-c,并进一步得到Pb与Pc。
超级电容输出功率Pc为:
动力电池输出功率Pb为:
式中,P-req为整车需求功率;Pbmax为动力电池最大输出功率;Pcmax为超级电容最大输出功率。
此外,在车辆以大功率行驶时,为确保超级电容有充足的能量输出,当超级电容SOC<0.5、动力电池放电负荷约为40%时,动力电池向超级电容进行充电。
4.2 隶属度函数与模糊规则
各输入、输出的隶属函数曲线如图4和图5所示,模糊控制器输入、输出隶属度函数主要分为S(小)、D(低)、M(中等)、G(高)、ZG(最高)5个级别。图4和图5中,整车需求功率P-req的论域为[-3,3],从能量安全考虑,动力电池和超级电容SOC的论域分别为[0.2,1]和[0,1],车速误差(Vm-Vs)的论域为[-3,3],模糊控制器输出分别为动力电池功率分配因子K-b(论域为[0.2,1])和超级电容功率分配因子K-c(论域为[0.1,1])。
由以上各输入输出隶属度函数可得出模糊控制规则,如图6、图7和图8所示。
由图6~图8可看出,仅在需求功率P-req较大时,动力电池提供较多能量,在其余低功率需求时,为延迟动力电池的使用寿命,最多仅提供动力电池最大输出功率的50%;在超级电容SOC<0.5时,动力电池增加了输出功率,在满足整车动力需求外还为超级电容充电。
5 仿真结果分析
基于某款单电源纯电动汽车,根据以上复合电源控制理论,在原有动力部件的基础上,将其改为复合电源纯电动汽车,并在MATLAB软件中建立整车控制仿真模型,综合分析复合电源的优势与多目标模糊控制策略的有效性。
5.1 试验车辆参数
试验车辆参数见表1。
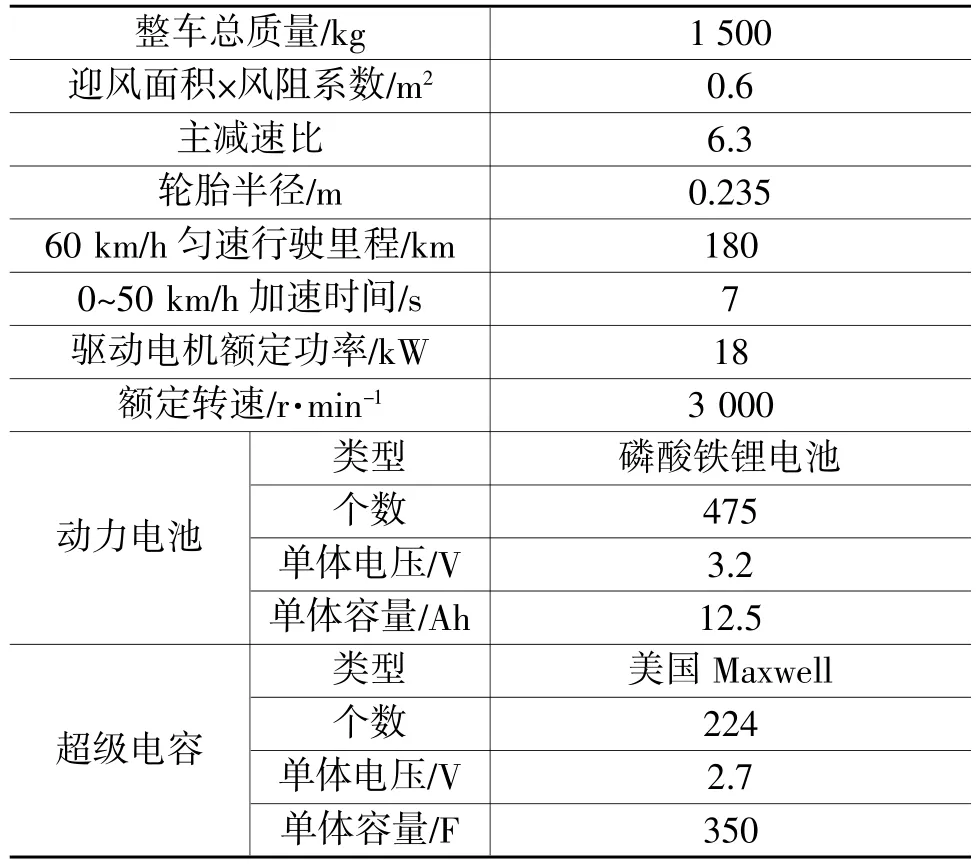
表1 试验车辆参数
5.2 仿真结果分析
在复合电源功率输出中,其电压变化范围很小,因此,输出电流的变化不仅能够反映两电源功率的变化,更能够准确反映动力电池的放电倍率,可用来分析动力电池是否在最优成本-寿命区间。在某段工况下,动力电池与超级电容的电流输出曲线如图9所示。
由图9可看出,当仿真开始即车辆起动时,超级电容提供大电流供给驱动电机;当大电流放电时,超级电容波峰高于动力电池,即超级电容优先提供大电流,与动力电池共同提供能量,其中动力电池电流输出速度较缓慢,且存在最大电流限值;电流小于0时,即再生制动工况,超级电容优先吸收大功率的制动能量,动力电池缓慢回收能量。
图10为动力电池与超级电容SOC的变化曲线。由图10可看出,因超级电容的充放电频率较高,从而引起其SOC值浮动相对较大。同时,由于动力电池在超级电容SOC值较低时为其充电,因此SOC值最终稳定在0.65左右;而动力电池的SOC变化相对缓慢。由此可知,该模糊控制策略能够充分发挥超级电容器对动力电池“削峰填谷”的作用,且提高了能量利用率。
在该模糊控制规则下,目标车速与实际车速的跟随性对比结果如图11所示。由图11可看出,在低速工况下,实际车速与目标车速基本一致,仅在最高车速与急加速工况下车速跟随性稍差,但基本能够反映驾驶员的驾驶意图,控制精度较高。
为证明复合电源的优势及多目标模糊控制策略的有效性,在相同的模拟仿真环境下,通过仿真得出单动力电池纯电动汽车、基于功率逻辑门限策略和多目标模糊控制策略的“动力电池+超级电容”复合电源纯电动汽车动力电池SOC的变化曲线,以验证复合电源的优势、逻辑门限控制策略与模糊控制策略的优势。模拟仿真结果如图12所示。
从图12可看出,即便是使用存在局限性的功率逻辑门限控制策略,相对于单动力电池的纯电动车,复合电源系统也可节省较多能量。以功率逻辑门限策略为基准,在仿真1 500 s内,复合电源的主能源(动力电池)SOC比单动力电池纯电动汽车的动力电池SOC提升了0.02,相当于0.38 kW·h,而此段时间超级电容的能量消耗为0.084 kW·h,因此,复合电源系统这段时间可节能0.296 kW·h,此部分能量可维持这款车以60 km/h的车速匀速行驶3.5 km。与整段工况历程(14 km)相比,延长续驶里程的效果非常明显。
多目标模糊控制策略可节约更多的能量,是对复合电源优势的进一步发挥,相比功率逻辑门限策略多节能30%。因此,多目标模糊控制策略能够更好地发挥复合电源优势,解决纯电动汽车续驶里程短的问题。
6 结束语
本文针对复合电源纯电动汽车的电源结构、工作模式进行了分析,并依据纯电动汽车性能指标与两储能单元的性能对复合电源进行了能量匹配,制定了安全约束,为多目标模糊控制策略的制定提供了理论依据。本文研究的控制策略能够充分发挥超级电容的优势,为纯电动汽车续驶里程的提升以及复合电源的研究提供了一定的理论参考。
1侯清亮.电-电混合纯电动汽车整车控制器的研究.合肥工业大学,2011.5.
2闵海涛,刘杰,于远彬,等.混合动力汽车复合电源的参数优化与试验研究.汽车工程,2011,33(12):1078~1083.
3Vehiele,Using Ultracapacitors and Neural Networks.IEEE Transaction on Industry Applications,2006.53(2):614~623.
4李贵远,陈勇.动力电池与超级电容混合驱动系统设计与仿真.系统仿真学报,2007,19(1):101~105.
5孙尚志,郝东辉,孙骏.电-电混合纯电动汽车的建模与仿真.农业装备与车辆工程,2011(1):11~15.
6董悦航,张建斌,等.超级电容和电池相结合的HEV动力和经济性仿真研究.系统仿真学报,2008,20(23):6529~6534.
(责任编辑文楫)
修改稿收到日期为2014年8月1日。
Energy Matching and Multi-objective Fuzzy Control Strategy Study on Battery/Ultra-capacitor Composite Energy Storage of EV
Zhang Bingli1,Wu Dexin1,Dou Cong1,Gu Yan2,
(1.Hefei University of Technology;2.Changzhou University)
In this paper,the structure and operating mode of battery/ultra-capacitor composite energy are analyzed,the parameter matching and security restraints are made according to the basic performance criteria of a BEV,and multiobjective fuzzy control strategy is established.Simulation results indicate that the presented control strategy can bring into full play the advantage of ultra-capacitor and expand the driving range of BEV,distribute reasonably battery/ultracapacitor power and reduce vehicle speed errors.
BEV,Composite energy,Energy matching,Multi-objective fuzzy control
纯电动汽车复合电源能量匹配多目标模糊控制
U469.72
A
1000-3703(2014)12-0054-05
安徽省科技攻关项目(12010202039)。
