基于步进电机控制的智能投币机改进研究
2014-07-13顾玉萍
顾玉萍,王 慧
(南通航运职业技术学院 管理信息系,江苏 南通 226010)
0 引言
随着物质条件的丰富和生活水平的提高,智能投币机的应用越来越广泛,在自动售货机、地铁售票机、无人售票公交车、玩具摇摆车、投币洗衣机等领域,都有着非常重要的作用。目前,我国市场上使用比较多的智能投币机是电磁式智能投币机。它根据电磁学原理,当币道一侧或两侧的传感器线圈探测到硬币通过时,与之相连的LC振荡电路相应地产生反映硬币特征参数的信号传给单片机,根据该信号与单片机中存储的信号比较来判别真伪。但现有智能投币机存在难以分辨真假币等不足之处。本文利用步进电机的转动和启停与控制脉冲有关的特性对现有投币机进行改进,利用与步进电机相连的五角叶轮使投入的硬币相对电涡流传感器的速度为零,投币机智能采集反映硬币特征的参数进行分析,继而控制步进电机和电磁阀分离真假币。
1 现有智能投币机的工作原理及存在的不足
智能投币机辨别硬币真假的工作原理大多是在硬币通道两侧设置1个或2个电磁传感器,在传感器线圈产生的电磁场作用下,检测出硬币通过时传感器线圈电感的变化,再通过相应的电路转化成频率的变化,以此确定硬币的真假。投币机计算频率判断硬币真假的基本方法是:单片机中一个计时器T0用于中断开始后脉冲计数的定时,计数器T1记录这段时间内的脉冲个数,根据脉冲总数与预设值比较,判断硬币的真假。在实际使用中,硬币投入初始速度的快慢对投币机的硬币判别有很大的影响。
为了便于分析,假定以投币口所在平面为基准面,硬币从进入投币口开始计时,计时器T0用于计时开始后脉冲计数的定时t,进入投币口前硬币不受外力作用,除了自重,第一次距离投币口高度为0,第二次距离投币口高度为10mm。
根据重力公式,可得到第一次初速v0=0,第二次初速v0′=0.014m/s。
假定币道是δ为60°的斜坡,硬币因受摩擦阻力引起的加速度a取值为2m/s2,重力加速度g取值10m/s2,定时t为0.1s,以投币口为基准,根据相关公式,可计算硬币在斜坡上滚动的位移S,可得第一次在斜坡上滚动的位移S=15mm,第二次位移S=16.4mm。
假定传感器线圈安装的位置以投币口为基准在斜坡距离S=15mm处,则两次对应的传感器线圈的位置不一样,如图1所示。

图1硬币滚动示意图
从图中可以看出,在初速不同时,同样的时间硬币相对于传感器线圈的位置不一样,即硬币的特征不一样,反映到传感器线圈上电感就不一样,振荡电路的频率的变化就不一样。因此,在硬币的不同位置传感器得到的特征脉冲数是不一样的,这就导致了智能投币机的误判。
2 具体改进措施
为了解决投币初始速度对硬币判别的影响,一般从以下两个方面考虑。
第一,采用加权算法。系统通过中断的方式将统计脉冲的时间细分成很多个时间段,对每个时间段都计算权值,算出经过速度加权的脉冲数,并对实时数据进行处理后得到加权平均频率,再和存储的各特征频率比较,判断硬币的真伪。该方法增加了程序的复杂程度、阅读难度和内存的使用。[1]
第二,修改币道或通过外部承载体携带硬币使硬币获得恒定的速度,尽力使硬币通过传感器时的速度都保持一致。如某设计一套能带动所有硬币以相同速度经过硬币识别模块的硬币传动装置,它由支撑板、滚筒和驱动装置组成,支撑板上设置弧形的硬币轨道,滚筒上设有绕滚筒圆周均匀间隔设置的凸起,相邻凸起构成硬币容纳槽,其结构相当复杂。
3 设计方案
针对上述分析,本设计采用设定的时间内,硬币相对传感器线圈的位置保持不变的方法来测量,即使硬币通过传感器线圈时速度为0。与上述方法相比,测量结果更加精确。具体实施方案为:当光眼电路探测到投入到闭式五角叶轮中的硬币时启动探测,电感测量电路检测反映硬币特征的信号并转换成频率的变化,在预定时间内统计,并与设定值比较判断硬币真假;步进电机带动闭式五角叶轮和电磁阀分离真假币。
3.1 电感测量电路
对于电感测量电路,探测硬币的关键部件是传感器线圈。它利用电涡流效应进行工作。由于它结构简单、灵敏度高、频响范围宽、不受油污等介质影响,并能进行非接触测量,得到了广泛的应用。当金属导体置于变化的磁场中,或者在固定磁场中运动时,在金属导体内就会产生路径在金属导体内闭合的感应电流,这就是涡流或电涡流。电涡流又产生一个交变磁场阻碍外磁场的变化。传感器线圈与被测导体相互作用,可以等效为一对互感,互感系数用M表示。其等效电路图如图2所示。
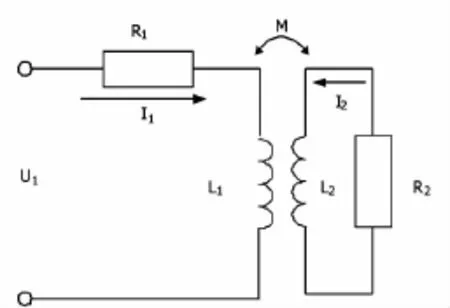
图2 电涡流传感器等效电路
设R1和L1为传感器线圈的损耗电阻和电感,R2和L2为金属导体的等效损耗电阻和电感。根据基尔霍夫定律,可知等效阻抗和等效电感,分辨如式(1)、式(2)所示。

具体应用中,一般将被测量变换成传感器线圈的电感量L的变化来进行测量。通过对等效电感L进行分析:L1与静磁效应有关,即与被测导体是否是磁性材料有关,如果是磁性材料,则同种材料L1随传感器线圈与被测导体之间的距离增大而减小,如果是非磁性材料,则L1不变;L2与电涡流效应有关,即电涡流的反射感抗,它与金属导体的材质有关。[2]采用电容反馈式振荡电路作振荡电路,如图3所示。

图3 电容三点式振荡电路
它的工作频率可从几百千赫到几百兆赫。当由L、C1和C2构成的谐振回路品质因数Q远大于1的时,电路的振荡频率如式(3)所示,式中,C=C1C2/(C1+C2)。

将传感器线圈作为电感接在电容三点式振荡电路中,在没有被测导体通过时,设回路谐振频率为f0,电压幅值为U0。当被测导体靠近传感器线圈时,由于电涡流效应,电感L发生变化,电路的谐振频率发生变化,谐振曲线根据材料的不同向左或者右移动,且电压幅值也降低。以铜镍合金制成的一元硬币为例,它是典型的软磁材料制成,靠近传感器线圈时,谐振曲线左移,频率和电压幅值降低。通过过零电压比较器将频率信号转换成单片机可辨别的方波信号,送入单片机的计数器进行分析处理。
3.2 闭式五角叶轮
闭式五角叶轮有五个叶片,每相邻两叶片夹角为72°,两叶片间为纳币腔,用于容纳从投币口投入的硬币,如图4所示。闭式五角叶轮固定在步进电机转轴上,位于投币口正下方,投币口正对闭式五角叶轮两叶片夹角。投入的硬币掉在正对投币口的闭式五角叶轮两叶片夹角中处于静止状态。
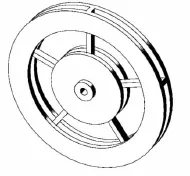
图4 闭式五角叶轮
3.3 步进电机和步进驱动器
步进电机是一种将电脉冲信号转换成角位移或线位移的电磁机械装置,它由脉冲信号驱动,以固定的角度一步一步地旋转。与普通电机相比,它的转子和定子上有许多细小的齿,这些齿决定了步进电机每走一步的间距。对应一个脉冲信号,步进电机转子转过的角位移即步距角用θ表示,如式(4)所示。

式中,n为转子齿数,m为运行拍数。
以常规二相四拍,转子齿n为50齿步进电机为例,其运行拍数m为4,所以其步距角θ如式(5)所示。

闭式五角叶轮每次需转72°,72度°1.8°的40倍,是整数倍,因此选用普通的二相四拍,转子齿为50齿步进电机。
当步进驱动器接收到一个脉冲信号时,就驱动步进电机按设定的方向转动一个固定的角度。本设计中采用ULN2003步进电机驱动器,步进电机用来旋转闭式五角叶轮,负载小。ULN2003(国产型号为5G1413)是七路达林顿驱动器阵列,为集电极开路(OC)输出的反向器,最大驱动电流可以达到500mA,是很常用的一种步进电机驱动器,如图5所示。[3]

图5 单片机控制步进电机
3.4 其它部分电路
其它部分电路主要包括步进电机复位电路、光眼电路、真假币分离电路。对于步进电机复位电路,步进电机上电时需要复位操作,本设计采用的方法是在投币口边缘安放一个行程开关,启动时程序让电机正转,直到闭式五角叶轮的任一叶片顶端使行程开关动作为止。光眼电路用来探测到投入到闭式五角叶轮中的硬币。光眼电路由光发射管和光接收管组成,光发射管和光接收管对称安装在闭式五角叶轮两侧。光眼电路连接至单片机输入口。硬币遮挡光接收管,产生开关信号给单片机。真假币分离电路包括真假币分离电磁阀和挡块,真假币分离电磁阀安装在储币箱进口上方,挡块安装在真假币分离电磁阀顶杆上。
3.5 工作流程
闭式五角叶轮接纳投入的硬币并使之保持静止状态,光眼电路探测到投入的硬币,启动计时器计时,位于硬币两侧的电磁传感器探测硬币特征,并将其转换成电感L的变化,并通过振荡电路转化成振荡频率f反馈给单片机。计时时间到后,单片机中计数器记录这段时间内的脉冲个数,根据脉冲总数与预设值比较,判断硬币的真假。同时步进电机带动闭式五角叶轮向左旋转72°,将硬币放入币道,并将下一个纳币腔对准投币口,接纳下一个投币。单片机根据硬币真假的结果选择是否启动电磁阀,将硬币放入储币箱还是退出投币机。主程序及中断程序流程图如图6所示。

图6 程序流程图
4 结束语
本文针对现有智能投币机的缺陷,在比较现有各种改进方法后,提出了一种新的解决方案,通过在硬币静止的时候来探测它的参数,经过试验取得预期的效果。在此基础上可做进一步改进,如增加显示、声光报警等功能,完善和扩展它的应用。
[1]朱晓乾.高准确率硬币鉴别装置的设计与实现[D].上海:上海交通大学,2008.
[2]郭玉,李彦梅,王鹏.基于电涡流传感器的硬币辨伪系统的设计[J].传感技术学报,2012(4):557-559.
[3]吴金戌,沈庆阳,郭庭吉.8051单片机实践与应用[M].北京:清华大学出版社,2002.
