实用型户外太阳能照明系统设计与实现
2014-07-13傅忠云李陈康
傅忠云,彭 杰,李陈康
(南京航空航天大学 金城学院,江苏 南京 211156)
实用型户外太阳能照明系统设计与实现
傅忠云,彭 杰,李陈康
(南京航空航天大学 金城学院,江苏 南京 211156)
针对采用单一传感器检测进行太阳能跟踪的抗干扰性差,跟踪误差大的缺点,系统以MSP430超低功耗单片机为主控制芯片,采用定时法、坐标法和四象限传感器比较法多种方法相结合,实现太阳的精确跟踪。白天控制太阳能电池追踪太阳并给蓄电池充电,夜晚控制高效LED模组照明,通过监测电池的电量,进行了电池充放电保护,并实现了照明系统的实时监控。实验测试结果表明,该系统硬件设计简单,能安全、稳定地进行太阳能的跟踪,照明系统高效实用,具有广泛的实际应用价值。
MSP430;精确跟踪;HV9910B;电量监测
随着现代工业的发展,全球能源危机和大气污染问题日益突出。太阳能取之不尽,用之不竭,清洁安全,是理想的可再生能源之一。我国的太阳能资源比较丰富,且分布范围较广,太阳能光伏发电的发展潜力巨大。在布线困难的山区或者野外,太阳能电池供电的用电与照明方案提出显得尤为重要。高效太阳能发电技术与LED照明技术结合,组成独立的照明系统,可省去传统太阳能发电的逆变并网、输变电及LED的降压等环节,可提高太阳能的利用效率,方便在户外照明系统中的应用。
1 系统总体设计
本系统选用TI公司的MSP430F149超低功耗单片机,根据定时法进行太阳能电池板方向粗略调整,然后利用四个光敏电阻组成的平衡电桥电路进行精确调整,控制两个电机运转,使太阳能电池板平面与太阳光线基本垂直,达到太阳能电池最大发电效率。另外考虑到天气的变化因素,在阴雨天和夜晚等无太阳情况,系统停止工作,重启系统时,利用坐标法对太阳跟踪进行修正。同时,对蓄电池电量进行了实时监控,进行了充放电控制系统,防止电池过充和过放,保证蓄电池的最大使用寿命。当光照低于一定值,打开LED照明系统,点亮7小时后逐渐熄灭,且能够实现LED电流可调。利用LCD12864液晶显示器进行系统实时数据显示,并实现了上位机监控软件的设计。
系统主要由单片机主控制器,太阳能电池模块,寻光与电机控制模块,按键模块,蓄电池模块,USB数据传输模块,LED高效照明控制模块,LCD显示模块以及上位机电量监测模块等九部分组成[1,5]。系统整体结构框图如图1所示。

图1 系统整体结构框图Fig. 1 Structure diagram of the overall system
2 硬件及各接口电路设计
本设计是基于太阳能电池板的照明系统设计,因为光伏电池控制电路一般要求总电流3 mA以下,因此主控芯片及电路中其他控制芯片都尽量选用低功耗芯片,所以该系统选用Texas Instruments公司的MSP430F149低功耗单片机作为主控单元。太阳能模板(PV Module)选用输出功率为20 W,短路电流为1.15 A,开路电压为17.4 V的太阳能电池板。
系统硬件主要由电源模块,主控单元模块,液晶显示模块,键盘输入模块,太阳光跟踪模块,电机驱动模块,电池电压采样模块,充放电控制模块,LED照明电路设计,时钟电路设计及数据通信模块等构成。
2.1 电源模块
整个系统由太阳能电池统一供电,12 V铅蓄电池在充满电之后会达到12 V以上,而系统中的单片机(MSP430F149)和LCD采用3.3 V供电。为了避免12 V电压通过AMS1117芯片降压时,较大电流引起发热而温度过高,导致电压不稳,甚至损坏芯片,在AMS1117前面使用了78系列电源芯片将电压降至5 V。电源电路原理图如图2所示。
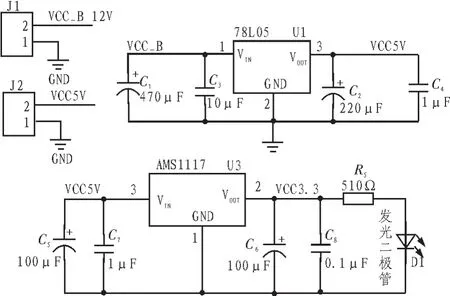
图2 电源电路原理图Fig. 2 Power circuit schematic diagram
2.2 单片机系统及外围电路设计
系统电路的主芯片采用TI(德州仪器)公司的MSP430F149 Flash[3]单片机。低电压范围1.8~3.6 V供电,本设计采用3.3 V的电压供电。本设计在RST/NMI管脚上接100 kΩ的上拉电阻,再接0.1μF的电容,电容的一端接地,同时,上拉电阻并接一个型号为IN4148的二极管,可以可靠的实现复位。LFXT1 接低频振荡器,接32768Hz的振荡器,直接接在XIN与XOUT之间,此时振荡器不需要接负载电容。XT2 接8MHZ的标准晶体振荡器。外部标准晶体振荡器接在XT2IN和XT2OUT之间,此时需要接22pF的负载电容。R14、R15是选择单片机程序调试的供电方式,R14连接至VCC3.3是选择外部电池,R15连接是由PC给其提供电源。这是方便在没有外部电源的情况下面,单片机也可以与PC连接进行仿真与程序下载。如果单片机脱离电脑运行,必须将R14连接,由外部电源供电。GND与AGND、AVCC与DVCC之间用0 Ω电阻连接,防止互相干扰。
在本系统中采用低功耗YB12864ZB液晶显示屏进行系统参数显示。为进一步降低系统功耗,通过一个外接按钮控制显示电路是否工作,当有来人需要查看时才开启。 按键设计为矩阵键盘,连接至单片机的P1.1~P1.5,在软件中采取中断的方式来控制。通过按键可控制显示器翻页和LED灯亮度调节等功能。
时钟电路芯片选用DALLAS公司的DS1302时钟芯片,采用该时钟电路进行蓄电池充放电控制及太阳光跟踪控制。利用上位机进行通讯时进行时钟的校准,提高系统的控制精度。
数据通信采用了CH341转接芯片,方便与设备的数据通信。P3.4与P3.5配置为串口通信端口。
2.3 坐标法及四象限传感器比较法跟踪以及电机驱动电路设计
光敏电阻是一种光电导器件,它对光照强度的变化非常敏感,随着光照强度的增大,它的阻值相应减小,电压变化曲线相对平稳。设计中利用四颗光敏电阻组成桥式电路,分成两组,分布在太阳能电池板平面的四角,利用单片机内部的多通道A/D转换电路进行采样,进行必要的软件处理后控制电机运行,使太阳能电池能够达到最大的输出功率。
利用分别竖直朝向天空,正东方和正西方的三个光敏电阻判断早中晚三个时间段,实现坐标法跟踪。同时通过这三个光敏电阻判断有无阳光,进而控制系统寻光电路的启停。
太阳能跟踪控制器采用步进电机作为驱动机构,与其他电机相比具有易开环精确控制,无累计误差等优点。太阳能跟踪控制器有两个自由度,两个步进电机分别控制太阳能电池板在水平和垂直的两个自由度上转动。水平方向的转动实现太阳方位角的跟踪,垂直方向的转动实现太阳高度角的跟踪。电机驱动芯片采用意法半导体公司的L298HN电机驱动芯片进行两个方向的步进电机的驱动。
2.4 电池电压采样电路与充电电路设计
由于A/D采样参考电压为2.5 V,为了实现电池过充与过放保护,可利用6只1M的电阻串联,将电池的电压6等分,采样电池电压乘以分压系数并显示在LCD上,并将电池电压与太阳能电池电压值上传至PC上供处理并绘制电池特性曲线。
控制器利用电池采样电路得到的蓄电池电压值,决定充放电,其控制电路如图3所示。太阳能电池经Q1、D1给蓄电池充电,增强型P沟道场管Q1通过单片机P5.4控制是否给蓄电池充电,D1为了防止蓄电池反向给太阳能电池充电,作反向保护,Q3通过P5.5引脚控制是否打开LED的电源[6]。

图3 充放电电路原理图Fig. 3 Charge and discharge circuit principle diagram
2.5 LED照明电路设计
选用单只3W高亮LED进行串联,以达到设计要求的输出功率。电路核心芯片利用高效LED控制芯片HV9910B。为保证亮度恒定并增强LED的可靠性,外部高亮LED串采用恒流方式控制,其恒流值由外部取样电阻值决定,变化范围从几毫安到1安。由于采样电阻非常小,自身所消耗的功率小,可使LED获得更大的功率。系统通过单片机P1.6第二功能输出PWM波形实现调光,且利用按键可修改PWM波形占空比,调节LED灯的亮度。LED照明控制电路如图4所示。
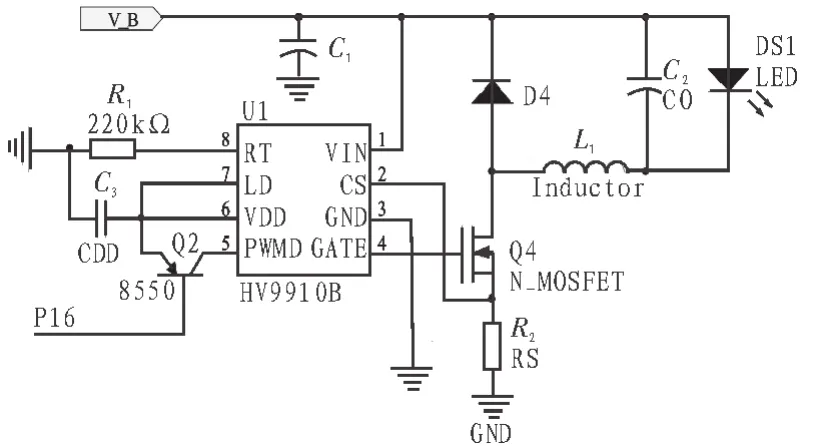
图4 LED照明控制电路Fig. 4 LED lighting control circuit
3 软件设计
3.1 系统程序设计
系统采用外部8 MHz高速晶体为时钟输入,将看门狗定时器配置为间隔定时器,1 s钟中断一次,在软件运行的大部分时间,系统处于低功耗的状态[10]。系统软件运行总体设计流程如下:上电后系统初始化,显示开机画面,显示电池电压及时间,每隔1秒钟将数据更新,并上传至PC机,15分钟定时中断进行太阳的位置的检测和跟踪。夜间系统停止寻光充电进行LED照明控制。系统主流程图如图5所示。

图5 系统主流程图Fig. 5 System main flow chart
3.2 太阳光跟踪模块软件设计
首先利用坐标法判断是否有阳光及太阳的大致位置[7-9];然后根据天体运行规律,由地方时,地理经度和地理纬度等可求得每个时刻太阳的高度角和方位角。利用GPS等精密导航仪器得到的太阳能电池板所处位置的地理经纬度数据。然后根据计算得到的高度角和方位角计算太阳能电池板要转动的水平角和俯仰角的范围,换算出步进电机的控制脉冲,控制电机转动,实现对太阳能电池板的角度的进一步调整。具体控制算法采用参考文献[9]中公式实现。最后利用四个象限的光敏电阻进行最后的细微的调整。图6所示为寻光部分流程图。
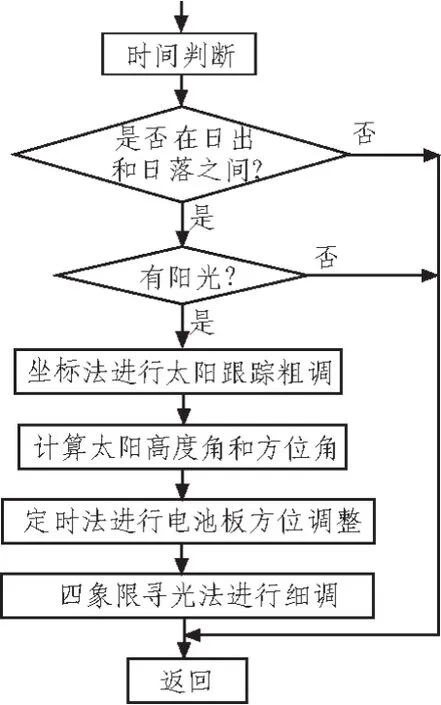
图6 寻光流程图Fig. 6 For optical flow chart
3.3 上位机的软件设计
随着芯片制造工艺的不断的改进,芯片的处理与数据存储能力不断的上升,但是为了将下位机大量的数据收集起来,便于组成大型的网络,还得借助强大的PC机,本设计中使用到上位机软件采用VB语言编写,对下位机传回的数据统计,建立数据库,以便日后查询。
4 软件设计
4.1 系统实物图
通过硬件系统的搭建,制作出了完整的系统实物。如图7所示。MSP430F149通过P3.4口发送给PC机的数据,包括当前蓄电池的电压,占空比换算之后的LED电流、功率,如图8所示。

图7 太阳能照明系统电路板实物图Fig. 7 Map of Solar lighting system circuit board

图8 上位机监控界面Fig. 8 PC monitor interface
4.2 系统调试结果
表1显示了LED电流、电压、功率与PWM占空比的关系。
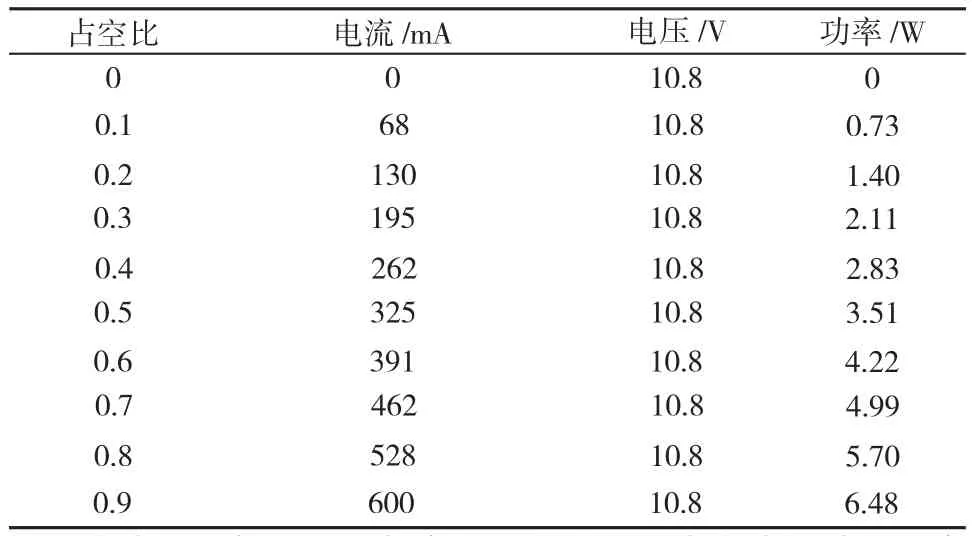
表1 LED电流、电压、功率与PWM占空比的关系Tab.1 relationship between LED current, voltage, power and duty cycle of the PWM
由表1可知:电流与占空比之间,基本为线性关系,当占空比为0时,MOSFET完全关断,LED完全熄灭,通过它的电流为0 mA。在LED点亮时,单只3 W的LED电压降为3.6 V,恒定不变,功率与占空比之间,也成正比例关系。
5 结束语
文中论述了一种基于MSP430单片机[11]的太阳能照明控制系统的设计思路及方法,考虑各种情况,结合定时法、坐标法和四象限传感器法三者的优点,进行了太阳的精确跟踪设计,进行了系统各环节的硬件电路的设计及相应软件设计,制作出了样品。多次实验调试结果表明该系统能稳定可靠的跟踪太阳,照明系统运行良好,具有较高的性价比和广阔的应用前景。
[1]刘胜利.高亮度LED照明与开关电源供电[M].北京:中国电力出版社,2010.
[2]田力文.太阳能光伏照明光源手册[M].北京:化学工业出版社出版,2010.
[3]沈建华,杨艳琴,翟骁曙.MSP430系列16位超低功耗单片机原理与应用[M].北京:清华大学出版社, 2004.
[4]汤普森.实用模拟电路设计/图灵电子与电气工程丛书[M].北京:人民邮电出版社,2009.
[5]Erel S,Akcil M, Erel G K,et al.The behaviour of a typical singlecrystal Si solar cell under high intensity of electric field[J].Solar Enery Matericals& Solar Cells,2006.582-587.
[6]彭军.实用电子电路设计丛书-晶体管电路设计(下)FET/功率MOS/开关电路的实验解析[M].北京:科学出版社,2004.
[7]关继文,孔令成,张志华.高精度太阳能跟踪控制器设计与实现[J].自动化与仪器仪表,2010(3):23-25.
GUAN Ji-wen,KONG Ling-cheng,ZHANG Zhi-hua.The design and implementation of high precision solar tracking controller[J].Automation&Instrumentation,2010(3):23-25.
[8]王雪文,王洋,阎军锋,等.太阳能电池板自动跟踪控制系统的设计[J].西北大学学报:自然科学版,2004,34(2):163-164.
WANG Xue-wen,WANG Yang,YAN Jun-feng, et al. Design of automatic track control system in solar cell[J].Journal of Northwest University:Natural Science Edition,2004,34(2):163-164.
[9]汤世松,舒志兵.双轴伺服太阳能跟踪系统的设计[J].自动化仪表,2011,32(2):49-51,55.
TANG Shi-song,SHU Zhi-bing.Design of the dual-axis servo solar energy tracking system[J].Process Automation Instrumentati on,2011,32(2):49-51,55.
[10]谭浩强.C++程序设计[M].北京:清华大学出版社,2004.
[11]梁佳,张帅.基于MSP430和C#的数据采集系统开发[J].电子科技,2011(10):115-118.
LIANG Jia,ZHANG Shuai. Development of data acquisition system based on MSP430 and C#Electronic Science and Technology,2011(10):115-118.
Design and realization of a practical outdoor solar lighting system
FU Zhong-yun, PENG Jie, LI Chen-kang
(Jincheng College,Nanjing University of Aeronautics and Astronautics,Nanjing211156,China)
Due to the existing solar tracking controller having defect of poor anti-interference and large tracking error, a solar-powered lighting system based on microcomputer technology is introduced. The system uses MSP430F149 ultra-low power microcontroller as the main control chip. Timing method, Coordinate method and four quadrant sensor comparison method are used for precise tracking of the sun. It controls the solar cell to track the sun and to charge the battery during the day.And the LED modules provides the efficient lighting at night. It can also monitor the battery, achieve battery charge and over discharge protection, and realize the real-time monitoring of lighting system. The test results show that, the system is simple, safe and stable. The lighting system is efficient and has a broad application value.
MSP430; precise tracking; HV9910B; power monitoring
TN710
A
1674-6236(2014)07-0120-04
2013-08-11稿件编号201308079
傅忠云(1980—),女,安徽六安人,硕士,讲师。研究方向:单片机等相关自动化技术。
